



机械减速异步电动机是由普通笼型异步电动机和机械减速装置所组成。它能稳定地输出低转速大转矩,作为低速机械设备的动力。最常用的机械减速装置有齿轮减速器和摆线针轮减速器。
齿轮减速异步电动机(YCJ系列)的典型结构如图2-38所示。它的减速器有两对齿轮,为二级减速。
此系列电动机有十几种减速比,配套电动机以4极或6极电动机较多。它们的输出转速很低。它还可以制成适合于某种特定环境下使用的专用型号电动机。
此类电动机只能减到某种需要的转速,不能调节转速。

图2-38 齿轮减速异步电动机的典型结构
摆线针轮减速异步电动机(YXJ系列)的转速器用的是摆线针轮行星传动机构,具有减速比大、效率高、体积小、重量轻、运行稳定、能承受过载冲击等优点。输出转矩可高达37000N·m左右。
摆线针轮行星传动机构主要由中心轮、转臂和摆线轮等基本部件组成。摆线针轮行星传动的原理如图2-39a所示。
外圈为一个固定的内齿轮,又名中心轮,图中以圆心O1和轴心Ⅰ表示,齿形为针状圆柱。与之相啮合的是一个摆线齿轮,亦称星齿轮,图中以圆心O2和轴线Ⅱ表示,齿形呈短幅外摆线的等距曲线。O1和O2的间距为转臂的偏心距A。(https://www.xing528.com)
电动机旋转时,它的轴通过与其相连接的偏心套使摆线齿轮沿着固定的内齿轮滚动,对轴线Ⅰ公转,同时对自身的轴线Ⅱ作与公转方向相反的自转。通常,摆线齿轮的齿数比内齿轮的齿数少一个。根据行星传动的原理,电动机每转一转,摆线齿轮就后退一个齿距。如果摆线齿轮的齿数为ZB,则传动比为-1/ZB(负号表示其转向与电动机相反)。
图2-39b表示由电动机轴的高速运动,通过摆线轮等中间环节,转化为输出轴的低速运动示意图。
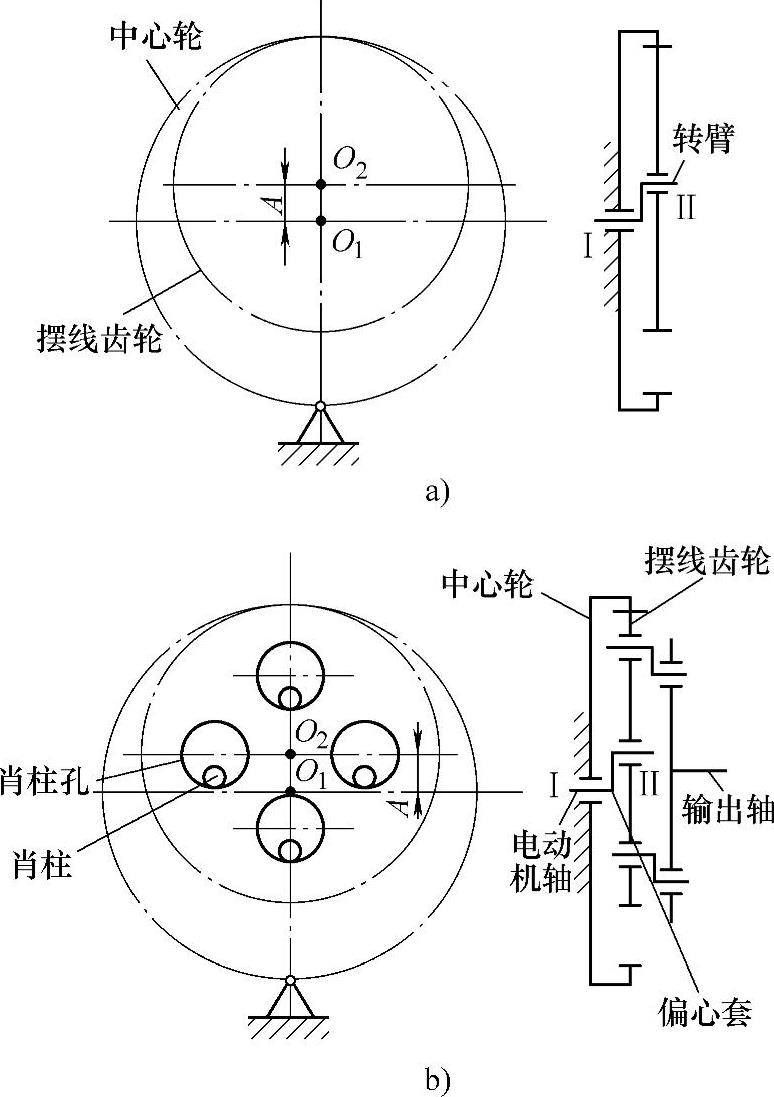
图2-39 摆线针轮行星传动原理示意图
a)行星传动原理 b)行星传动示意图
为了使轴保持平衡和便于拆卸,电动机轴上装有两个相位互差180°的偏心套(图2-39b中只画出一个)。在偏心套上分别装有一个形状完全相同的摆线齿轮。在偏心套和摆线齿轮间装有滚动轴承,以减少相互之间的摩擦损耗。在输出轴的构件上,固定着若干个以等弧距分布的肖柱和肖套,分别插入两个摆线轮端面上对应的圆孔中。电动机旋转时,迫使摆线针轮作复杂的平面运动,并通过圆孔对肖柱的运动(类似曲柄运动),将摆线轮的低速反转向运动传递给输出轴。摆线齿轮上的孔径与肖柱之差等于偏心距的两倍,以保证摆线轮作偏心运转时,肖套与孔的内圆面永远保持接触。
YXJ系列电动机主要用于驱动各种低速运转的机械,在轻工、化工、建工、纺织、运输等部门广泛应用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。