



从数值逼近的理论角度来看,窗函数法设计有限冲激响应数字滤波器属于均方误差最小的逼近,而频率抽样法设计有限冲激响应数字滤波器属于插值法逼近,它保证在取样点ωk与理想特性Hd(ejω)完全一致,在其他非取样点上H(ejω)是插值函数φ(ω,k)的线性组合。这两种逼近方法有一共同的缺点,就是在整个要求逼近的区间(0,π)内误差分布是不均匀的,特别是在幅频特性具有跃变点的过渡区附近误差最大。等波纹逼近是利用切比雪夫逼近理论,使其在要求逼近的范围内,误差分布是均匀的,所以也称为最佳一致意义下的逼近。与窗函数法及频率抽样法相比,当要求滤波特性相同时,阶数就可以比较低。
Hd(ejω)与H(ejω)分别是理想与实际设计的滤波器频率特性,Hd(ejω)的频率特性容差图如图6.5.1所示,在0≤ω≤ωp范围内最大误差为δ1;在ωs≤ω≤π范围内,最大误差为δ2。H(ejω)的图形如图6.5.2所示,Hd(ejω)与H(ejω)之间的误差如图6.5.3所示,这一误差具有等波纹分布特性。切比雪夫等波纹设计就是要求在0~π区间内使最大误差最小化。为了统一使用最大误差最小化的准则,通带和阻带内的误差统一表示成加权误差函数,定义加权误差为
E(ω)=W(ω)[Hd(ejω)-H(ejω)] (6.5.1)
式中,W(ω)为误差加权函数,有

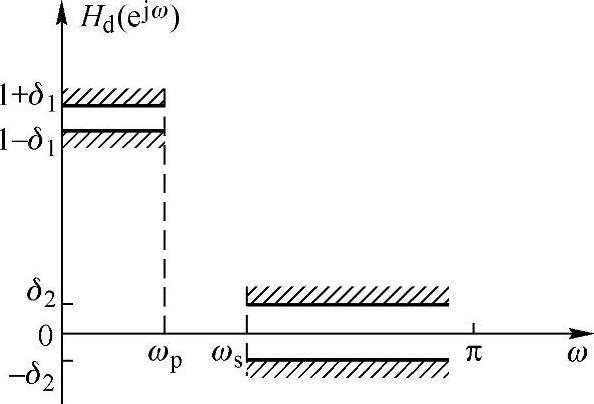
图6.5.1 低通滤波器的误差容限
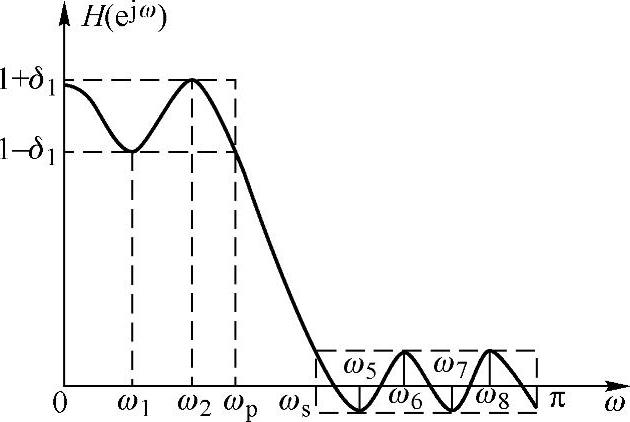
图6.5.2 实际设计低通滤波器的频率特性
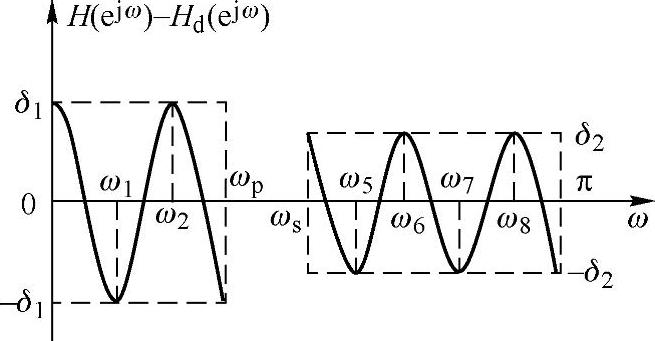
图6.5.3 H(ejω)与Hd(ejω)之间的误差
式(6.5.2)表明,在允许误差比较大的地方,例如图6.5.3所示情况,通带误差比较大,此时用较小的权函数;在误差要求小的地方用较大的权函数。这样,切比雪夫等波纹设计问题就是要求出H(ejω),使其在实现逼近的各个频带上(包括通带和阻带),误差函数E(ω)的最大绝对误差达到最小,如果用‖E(ω)‖来表示这个最小值,则有

式(6.5.3)也意味着使δ2为最小。
根据线性相位频率特性的一般表示式,为了分析简单而又不失一般性,设滤波器的单位抽样响应为h[n],其频率特性具有零相位,即

式中,假设N为奇数,并令 ,则有
,则有

由于用等波纹逼近,其误差函数的极值点也就是H(ejω)的极值点,考虑到cos(nω)是cosω的各次幂之和,即

因而给定M、H(ejω)的极值点数目,可以对H(ejω)求导得到,即有

式(6.5.7)表示求和对象为M-1次多项式,因而共有M-1个根,再加上sinω中的0和π两个根,H(ejω)共有M+1个极值,除ω=0和ω=π外,其余M-1个极值可以根据需要安排在通带和阻带内。例如图6.5.2所示为N=15的情况,除去ω=0和ω=π必须为极值外,对其余6个极值点,在通带内安排两个,阻带内安排四个。
根据线性相位频率特性对极值数目的约束,等波纹设计共有M,δ1,δ2,ωs,ωp五个参数需要确定。根据选择的参数不同可以有不同的逼近方法。
1970年由赫尔曼(Herrman)和舒斯勒(Schuessler)提出固定参数M、δ1、δ2,允许ωs、ωp改变,从而导出等波纹滤波器设计的非线性方程,即在M-1个极值频率处取H(ejω)的值为1±δ1(通带内)或±δ2(阻带内),各阶导数在这些频率处为零。例如对图6.5.2所示的情况,有
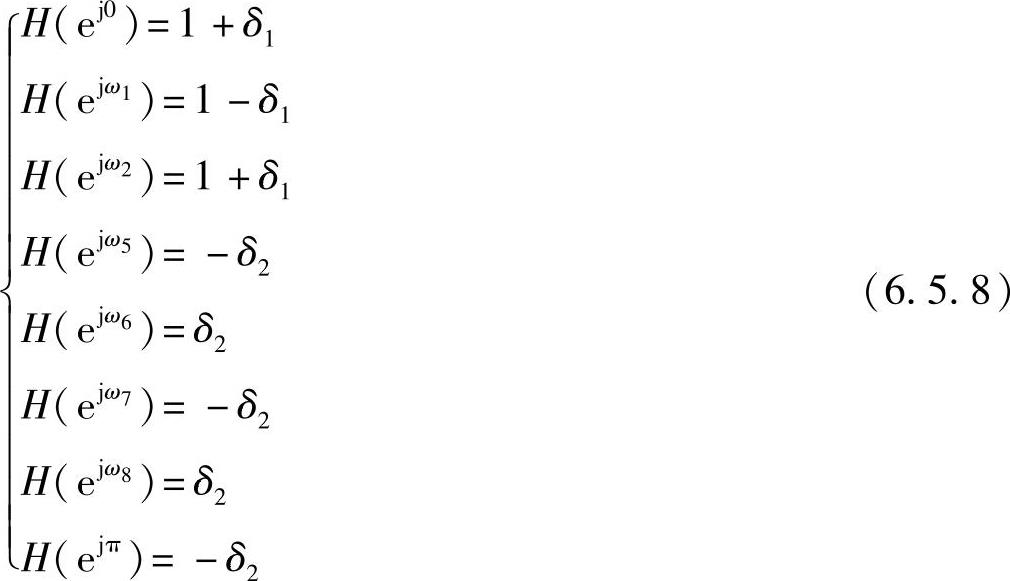
此外,在各极值点的导数应等于零,即有
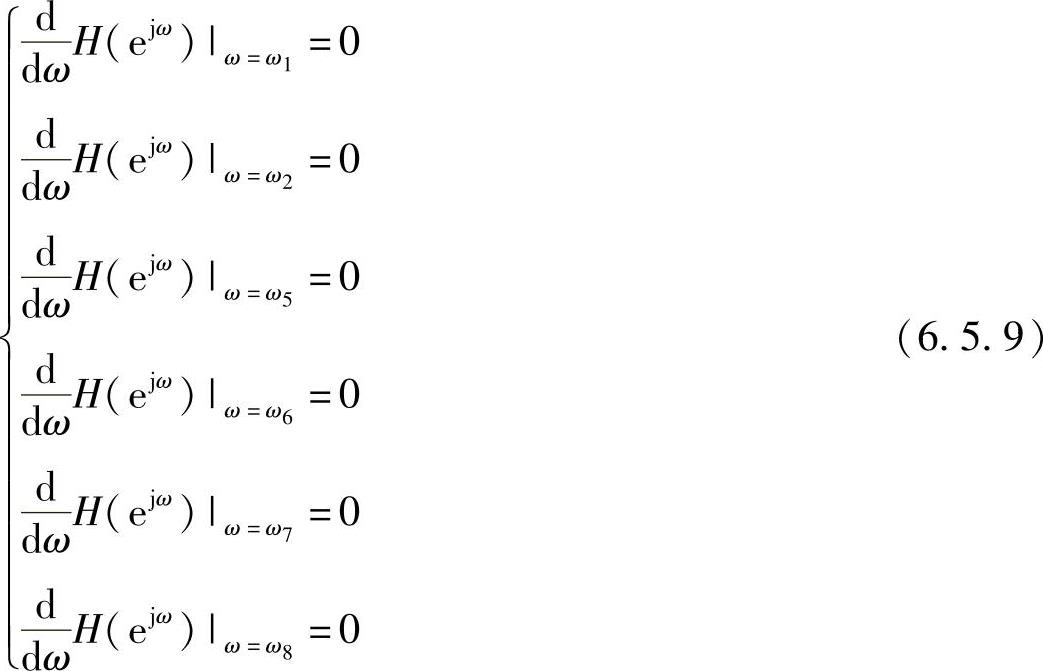
这两组联立方程共有(M+1)+(M-1)=2M个方程,所以可以解出M-1个未知频率和M+1个a[n]系数。这是一组非线性方程,一般用Fletcher-Powell算法迭代求出。
这种等波纹设计方法的主要缺点是要解一组非线性方程,因而适用于M值较低的情况。另外由于只是根据N及δ1、δ2来设计,因而过渡带ωs和ωp无法控制,所以不够灵活。
为了克服以上设计的缺点,1972年Parks和McClellan将切比雪夫逼近理论中的“交替定理”用于等波纹滤波器的设计中。当“交替定理”用在等波纹有限冲激响应数字滤波器设计中时,定理可以这样表述:设F为闭区间0≤ω≤π的任一闭子集,为使式(6.5.4)的H(ejω)在F上成为Hd(ejω)唯一最好的逼近,其充要条件是,函数E(ω)在F上至少有M+2个变号,且E(ωi)=-E(ωi-1)=±‖E(ω)‖=maxE(ω),其中ω0≤ω1≤ω2…≤ωM+1,所有ωi属于F。这一定理不仅说明H(ejω)的存在唯一性,而且指出构造H(ejω)的具体方法。(https://www.xing528.com)
根据“交替定理”假设已知F上的M+2个交错频率为ω0,ω1,…,ωM+1,则由式(6.5.1)得

式中,a[n]和δ2都是待求的参数。式(6.5.10)可以表示为矩阵形式,并把a[n]简化写作an,有
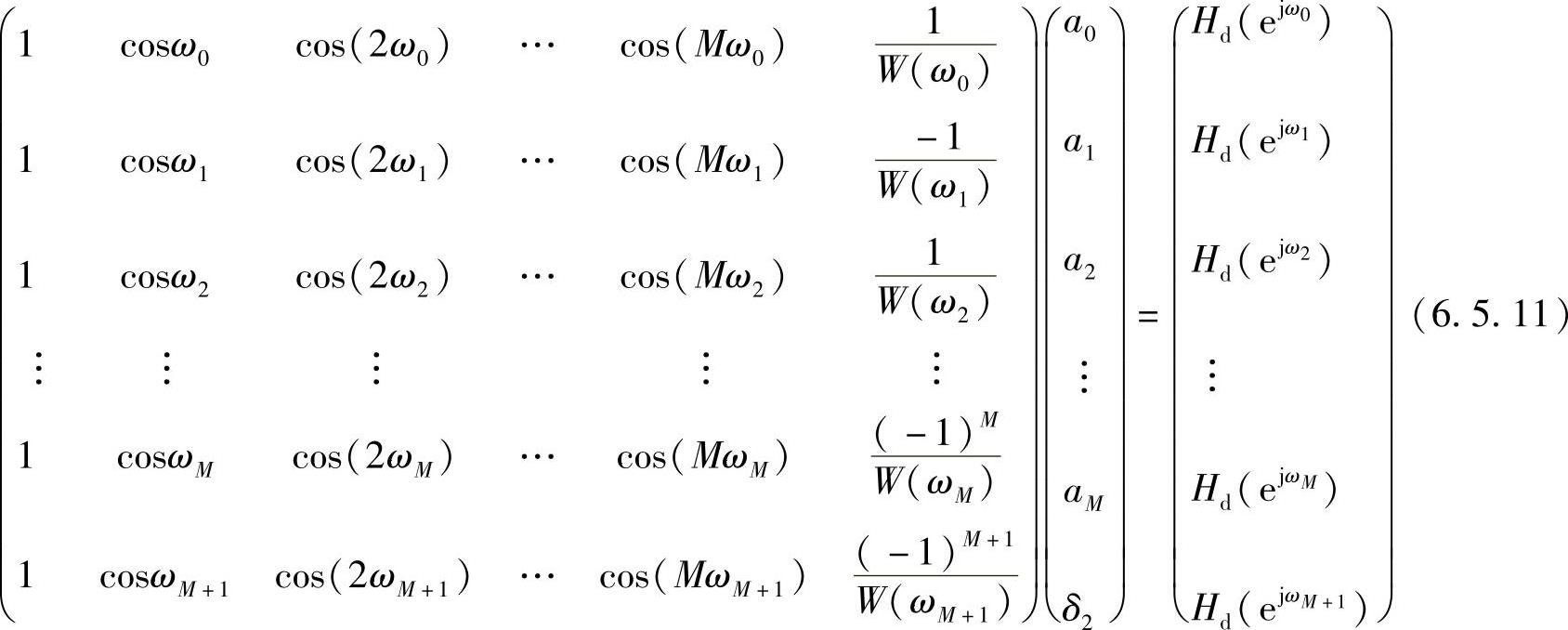
解式(6.5.11)方程组,可以唯一地求出系数ai[i=0,1,…,(M+1)]及偏差δ2,这样即可构成最佳逼近滤波器H(ejω)。
在这里需要说明的是,根据H(ejω)的极值点约束条件,共有M+1个极值,而式(6.5.11)表示的方程组要求有M+2个交错频率,实际上在过渡带处的两个频率ωs和ωp都可以达到极值,即

因此ωs和ωp也是属于F集中的两个频率,这样,满足“交替定理”的频率共有M+3个,所以这时设计的滤波器称为“超波纹”滤波器。“超波纹”的含义是指把ωs和ωp也包括在极值频率范围内,因此它比原来要求的极值个数M+2多了一个。用这种方法设计的滤波器实际上是指定M、ωs、ωp,而使误差δ1和δ2达到最小。如果要求的δ1和δ2值是已知的,那么为了算出预定的δ1和δ2滤波器,可以固定ωp,改变ωs,重新进行设计计算,直到满足提出的δ1和δ2为止。
解式(6.5.11)表示的方程组是困难的,因为所有极值事先是不知道的。通常用数值分析中的Remez算法,靠逐次迭代来求出要求的极值频率。这种算法有下列几个步骤:
第一步:首先在频率子集F上等间隔取M+2个频率ωi[i=0,1,…,(M+1)]作极值频率的初始猜测值,然后用下式求出δ2,即

式中

把ωi[i=0,1,…,(M+1)]代入式(6.5.14),求出δ2,这就是第一次指定极值频率的偏差值。
再由δ2并利用重心形式的拉格朗日插值公式得到H(ejω),即

式中

把求得的H(ejω)代入式(6.5.1)的误差表示式中,得到误差函数E(ω)。如果这样得到的E(ω)在所有频率上都能满足E(ω)≤δ2,则说明δ2是波纹的极值,且ω0,ω1,…,ωM+1的初始猜测值是交错点组频率,计算即可结束。但实际上第一次不会恰好如此,总有某些频率使E(ω)>δ2,因而需要进行第二步。
第二步:在第一步找出的使E(ω)>δ2的那些频率附近,找出局部极值点,用这一局部极值频率代替原来初始猜测频率,这样又得到一组新的交错点组频率,根据式(6.5.13)重新计算δ2,且求出H(ejω)和E(ω),这就是新一轮迭代。
如此重复迭代,由于每次新的交错点频率都是E(ω)的局部极值点,因此按式(6.5.13)计算的δ2是递增的,但最后收敛到δ2自身的上限,此时H(ejω)也就最佳一致地逼近Hd(ejω)。若再进行一次迭代,E(ω)的峰值将不会大于δ2。到此迭代即告结束,对H(ejω)求离散傅里叶逆变换从而得到要求的h[n]。
以上算法的示意图如图6.5.4所示。设图中第一次极值频率估计不合适,计算出来的δ2太小,因而按上列迭代步骤第二步寻求局部极值频率,这样必须在通带和阻带内取较密的频率分割点,从而收索找出峰值点,以此作为新的一组交错点组频率。图6.5.5画出了Remez交换算法的流程图。这种交换算法的计算机程序可以在有关的参考书中找到,这里不再赘述。
Remez交换算法占用内存较少,运算时间短,效率高。实践表明,如果初始估计极值频率点为均匀分配,那么一般只需五次左右迭代即可找到要求的极值频率。
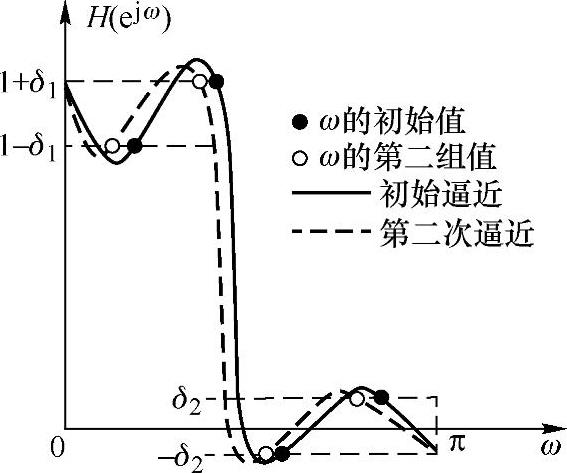
图6.5.4 Remez交换算法示意图
等波纹设计中可控制的参数是δ1、δ2、ωp、ωs,而滤波器长度N需事先给定,通常用下列近似公式来估计滤波器长度,即

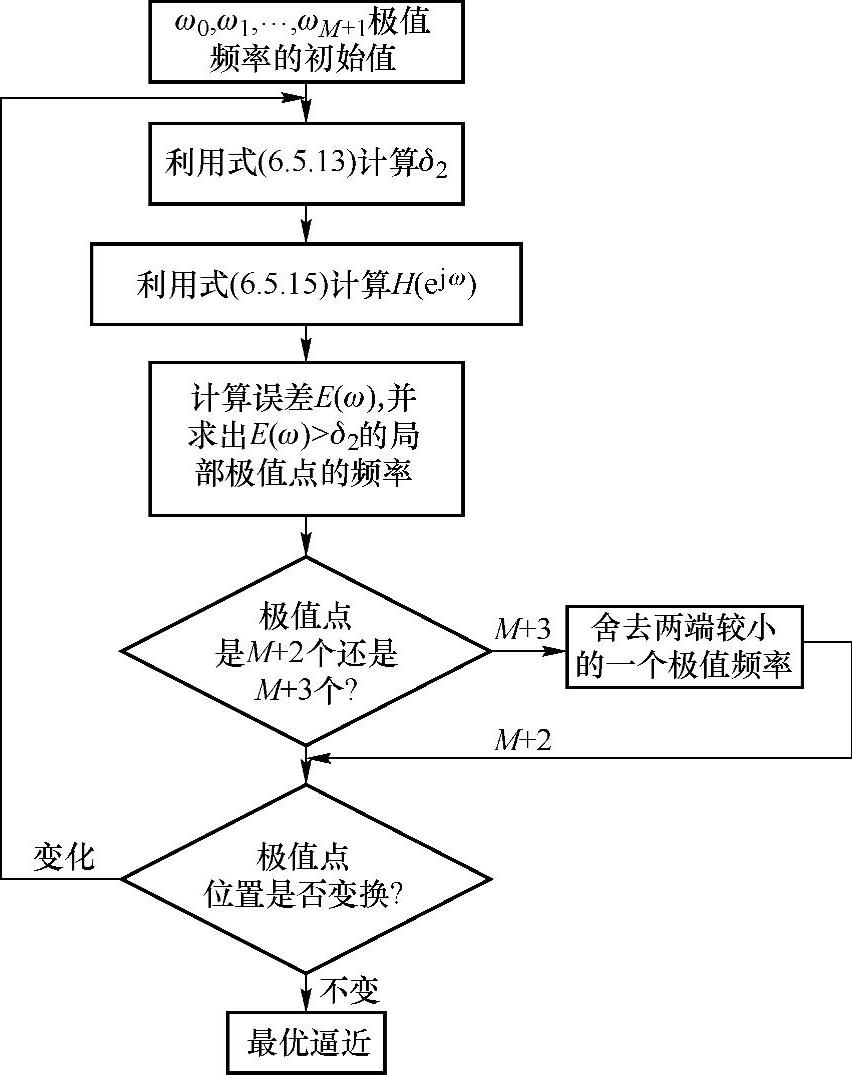
图6.5.5 Remez算法流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。