



系统的变换域分析是利用z变换或傅里叶变换对系统的性能进行分析。对于线性移不变系统,变换域分析方法更能简洁明了地表现出系统的各项性能。
线性移不变系统的主要性质往往可以用系统函数H(z)来体现。线性移不变系统的系统函数H(z)定义为:系统在零状态情况下,输出序列的z变换与输入序列的z变换之比,即

实际上它就是单位抽样响应h[n]的z变换,即

对于用差分方程形式给出的线性移不变系统,其输入输出关系为

对方程两边取零状态下的z变换,就可以得到系统的系统函数为

如果对式(1.4.19)的分子、分母多项式进行因式分解,则有
式中,ci和dk分别为H(z)的零点和极点。因此除了一个常数K之外,系统函数可完全由它的零、极点来决定。零、极点的分布及H(z)的收敛域决定了系统的很多特性,我们把这种分析方法称为零、极点分析法。
1.零、极点分布与系统的稳定性和因果性
对于线性移不变系统,在有界输入产生有界输出意义下稳定的充要条件是h[n]绝对可和,即

这表明稳定系统的系统函数H(z)的收敛域包含单位圆。
线性移不变系统是因果的,它的充分必要条件是h[n]=0(n<0)。这一条件意味着H(z)的收敛域必须是某一圆外的全部z平面,包括z=∞在内,即
Rx-<z≤∞ (1.4.22)
综合上述两点,如果系统是稳定因果系统,则系统函数H(z)的极点都必须在单位圆内。所以系统函数的极点分布与收敛域共同决定了系统的特性。
2.零、极点分布与系统的可逆性
给定线性移不变系统的系统函数H(z),它的逆系统的系统函数由式(1.4.15)关系可以得出

若H(z)由式(1.4.20)给出,则其对应的逆系统的系统函数为
可见H(z)的零点ci成为Hinv(z)的极点;H(z)的极点dk成为Hinv(z)的零点。而Hinv(z)的收敛域,受到式(1.4.23)给出的关系约束,即
H(z)·Hinv(z)=1 (1.4.25)
式(1.4.25)成立的条件是H(z)和Hinv(z)有共同的收敛域,如果两者没有共同的收敛域,则原系统是不可逆的。
【例1.4.8】 已知某系统的系统函数为

问系统是否可逆,若可逆,求出对应的hinv[n]。
解 逆系统的系统函数是

由于Hinv(z)只有一个极点zp=0.5,因而其收敛域只有两种可能:|z|>0.5和|z|<0.5。当|z|>0.5时收敛域与H(z)有共同部分,因而H(z)的逆系统存在,而且逆系统对应的单位抽样响应为

这一逆系统是稳定的而且是因果的。若Hinv(z)的收敛域|z|<0.5,则与H(z)没有共同的收敛域,此时的Hinv(z)不能作为H(z)的逆系统。(https://www.xing528.com)
由式(1.4.23)可以得出,如果H(z)的所有零、极点位于单位圆内,即系统是稳定的因果性系统,则它的逆系统存在,而且是稳定的因果性系统。这种系统就是最小相位系统。
3.零、极点分布与系统的频率特性
系统的频率特性定义为:当输入为不同频率的正弦序列或复指数序列ejωn时,系统的稳定响应与输入信号角频率ω之间的关系。对线性移不变系统,有

式中,H(ejω)就是系统的频率特性。式(1.4.26)表明系统在稳定情况下,对ejωn的输入信号,输出仍是ejωn的形式,只不过被系统频率特性H(ejω)加权。凡是具备这种特性的输入信号称为该系统的本征函数,对应的加权系数称为本征值。因而ejωn是线性移不变系统的本征函数之一,对应的本征值H(ejω)是系统的频率特性。
从频率特性的定义可以得出

也就是说系统的频率特性是单位抽样响应的傅里叶变换。如果系统是稳定的,其收敛域包含单位圆,则傅里叶变换存在,也就是说z变换在单位圆上的特性构成了系统的频率特性。
系统的频率特性可以根据系统函数H(z)的零、极点分布由几何方法直接地确定。在式(1.4.20)中,令z=ejω,则有

根据图1.4.7所示的几何关系,令

其中B点位于单位圆上,表示任意角频率ω,Qi和φi分别为矢量 的模和相角,而Pk和θk分别为矢量dkB的模和相角。于是
的模和相角,而Pk和θk分别为矢量dkB的模和相角。于是
因此系统的幅频特性为

系统的相频特性为
arg[H(ejω)]=arg[K]+ω(N-M)+(φ1+φ2+…+φM)-(θ1+θ2+…+θN) (1.4.32)
由式(1.4.31)可以看出:①当频率点变到极点附近时,Pk就变小,在该极点附近的频率就会出现峰值,极点越接近单位圆,峰值就越尖锐;同样,当频率点变到零点附近时,Qi就变小,在该零点附近的频率就会出现低谷,当零点在单位圆上时,该零点就是传输零点。可见在单位圆附近的零极点对系统的幅频特性有较大的影响。②零点可在单位圆内、外,但极点只能在单位圆内,否则系统将不稳定。③而系统的相位响应对幅频特性没有影响。
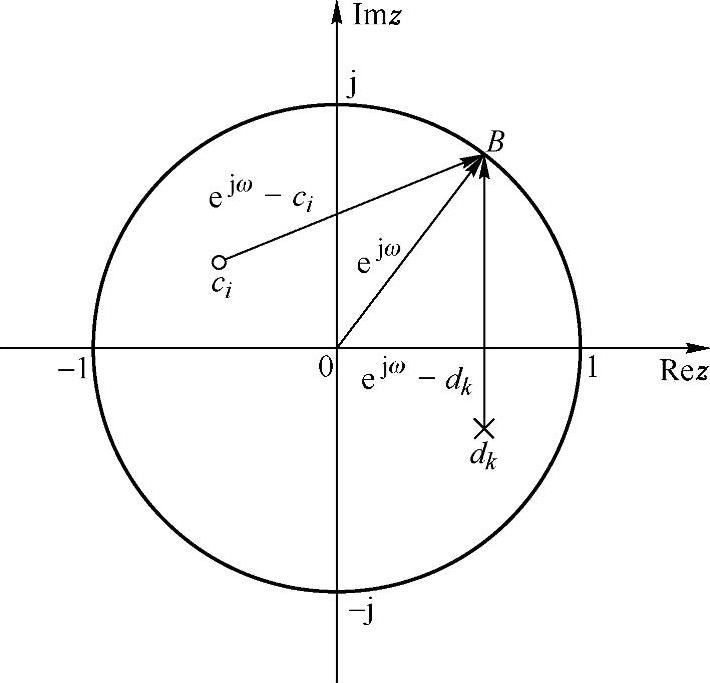
图1.4.7 频率特性的几何法确定
【例1.4.9】 已知系统的差分方程为y[n]-ay[n-1]=x[n](0<a<1),指出系统函数的零、极点并分析系统的频响特性。
解 系统的传输函数为

所以,系统的极点zp=a,零点zz=0,其分布如图1.4.8所示。由图可知,当ejω在单位圆上从ω=0逆时针旋转一周时:①在ω=0处,极点到单位圆的距离最短,所以ω=0频率点幅度最大,成为波峰。②在ω=π时,极点到单位圆的距离最长,所以ω=π频率点幅度最小,成为波谷。③在原点处的零点,对幅频特性没有影响。
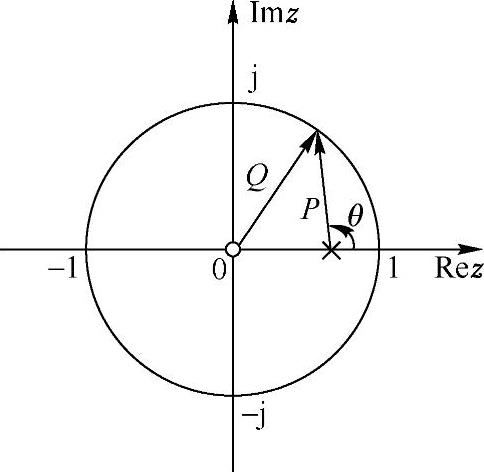
图1.4.8 一阶系统零、极点分布
对应的幅频特性和相频特性为


其幅频和相频特性如图1.4.9所示。
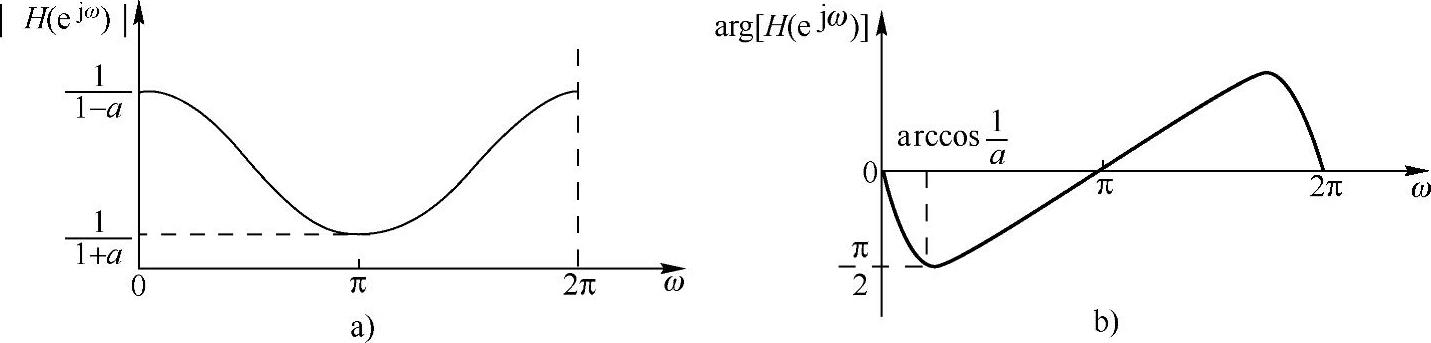
图1.4.9 一阶系统幅频和相频特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。