



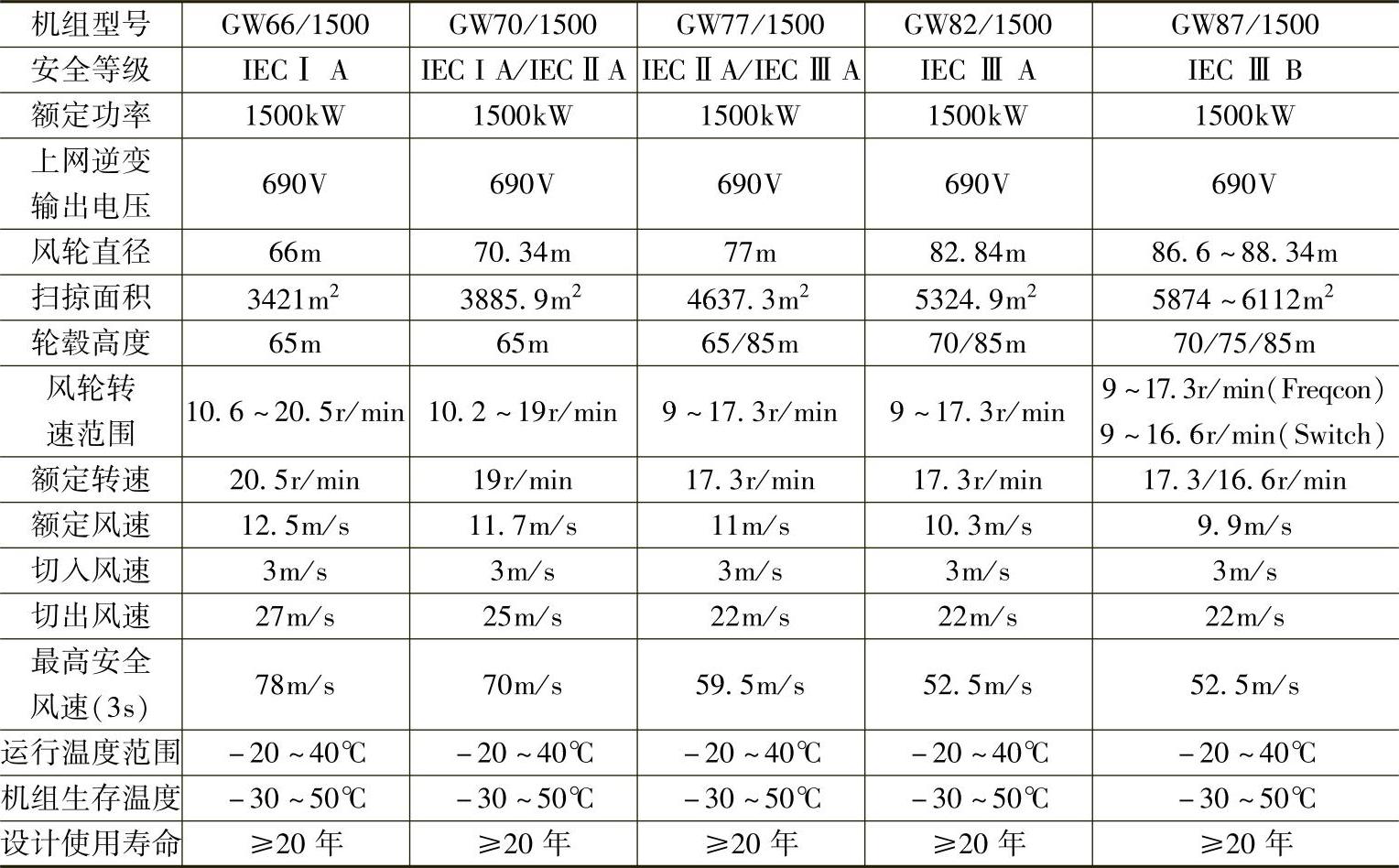
8.1.1.1 风电机组系统技术数据(见表8-1)
表8-1 风电机组系统技术参数
8.1.1.2 运行系统介绍
1.整机系统介绍
金风科技GW1500系列机组主要由风轮、发电机、机舱、塔架、电控系统等组成,如图8-1所示。
2.运行状态
金风科技GW 1500系列机组具有自动运行功能,整个运行过程由控制系统控制。它能根据外部条件的变化自动做出反应,控制系统通过传感器获取外部所有的信息(风速、风向等),并获取有关的风电机组数据(功率、速度等),根据这些信息,控制系统调整风电机组的运行,保证风电机组一直在优化的、安全的环境里运行。运行系统有不同的逻辑状态,状态的选择取决于外部条件、风电机组运行的工况和系统自身的当前状况。风电机组状态共有7种,分别如下:
(1)初始化状态PLC上电后,PLC掉电系统重新起动,需要进行初始化工作,PLC首先获取CF卡上的数据,这些数据包含风电机组最基本的控制参数,如有故障,进入“停机”状态,如无故障,进入“待机”状态。
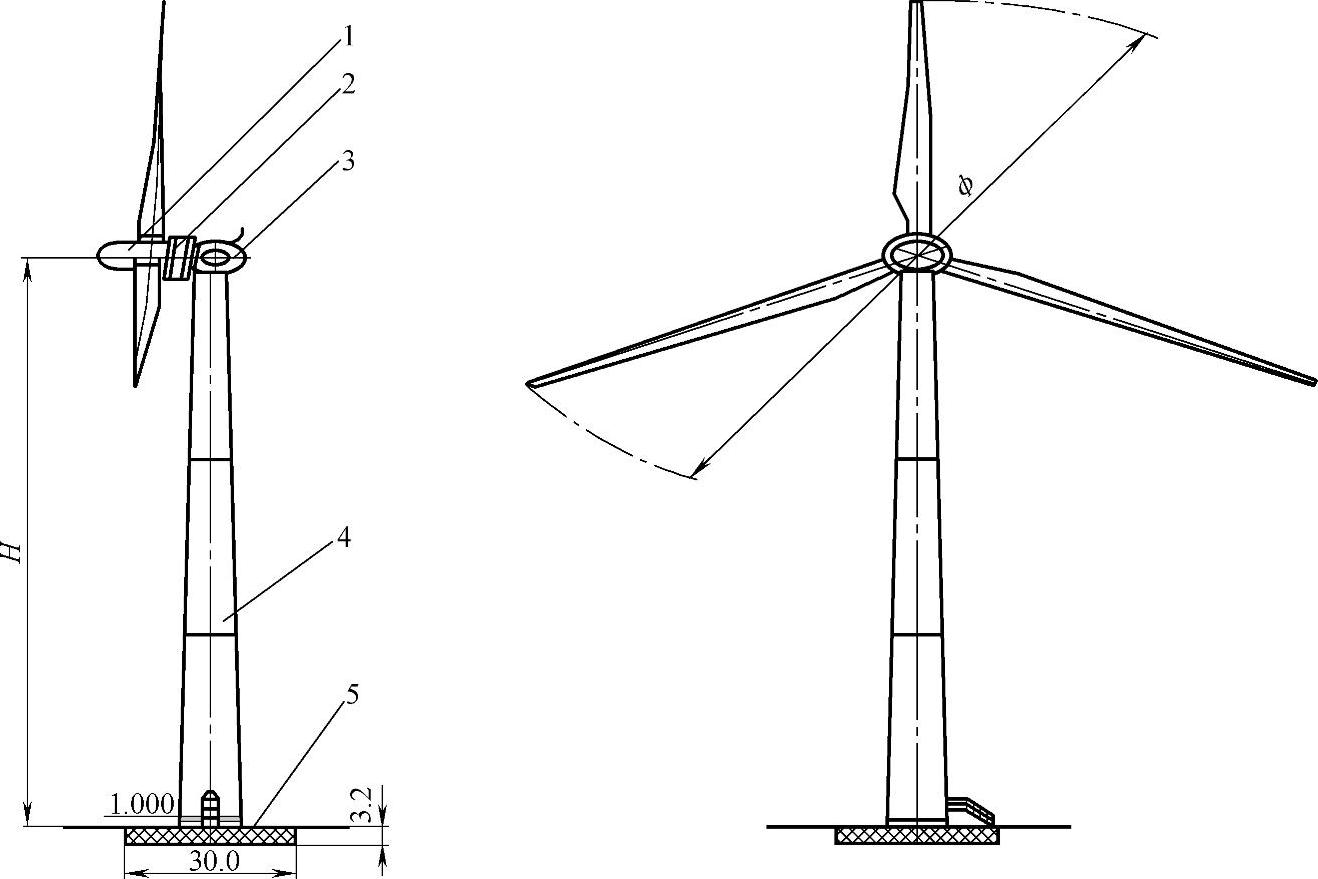
图8-1 整机系统
1—风轮(ϕ为直径) 2—发电机 3—机舱 4—塔架 5—基础
(2)待机状态 待机是无故障时风电机组慢速运转无功率输出的状态,叶片在顺桨位置,风轮空转。在这种状态下,控制系统直接采集外围传感器数据,同时读取变流器及变桨系统数据,对以上数据进行逻辑判断比较,检测设备是否存在故障及警告。如果风电机组在正常待机状态中,则必须满足下列条件:
1)没有故障存在。
2)安全链正常。
3)没有暴风警告信号。
4)没有解缆信号。
5)没有手动变桨信号。(https://www.xing528.com)
(3)起动状态 当机组处于正常待机状态时,机组通过内部程序判断符合运行条件时自动触发起动指令,则机组执行发电机侧、网侧断路器合闸动作,同时执行变流器预充电,当主控制器接收到充电完成反馈信号后,如果满足机组起动的起动风速,立即发出桨距调节指令,变桨系统将使叶片的桨距角变桨到预先设定角度,控制系统在此阶段需要评估机组是否应该执行下一步动作,意义在于评价当前风速是否达到可以发电的要求,进入加速状态。
(4)加速状态 当机组处于起动阶段,同时控制系统评估外界环境已经满足条件,则机组进入加速阶段,在这一阶段,叶片以设定的速度向最小桨距角变桨,在该状态下,机组监测发电机转速,在合适时间点主控制器发出变流器调制指令,待变流器调制成功后,机组具备发电的所有条件。
(5)发电状态 发电状态是机组处于并网运行发电过程,通过调整发电机输出、叶片桨距角和变桨系统,控制系统使风电机组保持在较优的运行状态。以下情况发生时,发电运行状态发生改变,进入其他状态:
1)风速过高或过低→待机或停机。
2)发生故障→停机或紧急停机。
3)运行人员手动停机→停机。
(6)停机状态 风电机组的停机共分为正常停机、快速停机、紧急停机。不同的情况机组选择不同的停机方式,停机时叶片被调整到顺桨的位置,风轮转速降低。
(7)维护状态 机组处于停机状态,此时如果触发手动维护开关,机组直接进入维护状态;风电机组处于运行状态(起动、加速、发电等三个状态)时,如果触发手动维护开关,则机组执行正常停机过程,而后进入维护状态。维护状态允许以下操作:
1)手动偏航。
2)手动变桨。
3)维护制动。
3.安全保护系统
风电机组是全天候自动运行的设备,其整个运行过程都处于严密控制之中。安全保护系统可以分为三层结构:计算机系统,独立于计算机的安全链,器件本身的保护措施。在机组发生超常振动、过速,以及出现极限风速等故障时,保护机组。独立于计算机系统的安全链,将可能对风电机组造成致命伤害的故障节点串联成一个回路,其中任何一个节点被触发后也会引发系统紧急停机。安全保护措施是让系统执行紧急停机的动作,即让变桨系统以7°/s的速度向90°顺桨。
4.风电机组运行的控制
风电机组的运行控制系统能够优化输出功率,并能限制设备的机械应力达到比较小的值。由于风电机组可以变速运行,因此就能保证设备在大多数时间里保持较好的效率值。风电机组的运行控制系统是依据功率曲线执行的,并保证风电机组在对应风速段内有较佳的输出功率。同时,该系统根据风速采取了以下不同的控制方式:
(1)部分负荷 风速低于额定风速时,风电机组的输出功率低于额定功率。风电机组的控制主要为功率调节控制。通过增减输出功率,保证风轮转速在规定的速度曲线数据范围内。
(2)满负荷 风速高于额定风速时,输出功率会超过额定功率。为防止该现象的发生,要限制风轮吸收风能的能力。为保持发电机输出额定功率,调整叶片桨距角使输出功率保持在额定功率点上。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。