



传统测风仪主要是机械式的。机械式测风传感器具有抗强风能力强,风速与风杯转速为线性关系,测量准确度较高等优点。但是机械式测风传感器的机械转动部分会引起惯性迟滞效应,响应速度较慢,无法测量低于启动风速的微风。此外,其机械活动部件在长期暴露于风沙的工作环境下,容易磨损,寿命有限,维护成本较高。
新型测风仪有超声波测风仪、多普勒测风雷达测风仪、风廓线仪等,如非接触式的超声波和激光风速计。超声波风速计通过检测声波的相位变化来记录风速;激光风速计可以检测空气分子反射的相干光波。这些非机械式风速仪的优点在于受气候(如结冰天气)的影响较小,如图2-1所示。
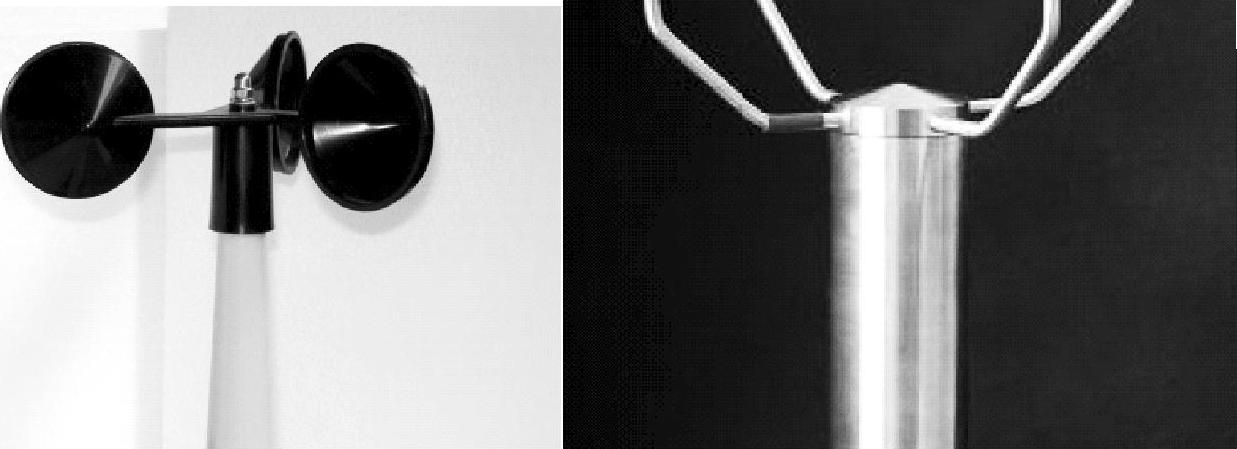
图2-1 风杯式和激光风速计
1.机械式测风传感器原理
目前,国内服役的风电机组大多都采用机械式测风设备,由风向标、风速仪及其加热设备构成。
风向传感器的变流器是由提供24V电源的光耦合器构成。风向标的固定部分有底座及其控制电路,不固定部分包括风向标指针和位于基座内部的金属半环。当金属半环通过光耦合器时信号为低电平,而出现相反的情况时信号为高电平。当风向标随风向变化而转动时,通过轴带动金属半环转动产生的光电信号对应当时风向的格雷码信号输出。
风速传感器的固定部分由提供24V电源的光耦合器及其控制电路构成;不固定部分由3个互成120°固定在支架上的抛物锥或半圆空杯感应部件构成,空杯的凹面都顺向一个方向并随着风的作用而转动。在顶部的内部基座中有一带齿的金属环,环齿每次经过光耦合器,将会给出一个24V的脉冲信号,每转总会给出6个脉冲。由脉冲与脉冲之间的时间间隔得出频率。风电机组控制系统将频率转化为风速。
2.超声波测风传感器原理
超声波测风传感器的测量方法主要有时差法、相位差法、频差法、声共振法、多普勒法、相关法、波束偏移法、卡门旋涡法、噪声法等,其中时差法和声共振法是目前较为广泛采用的方法。基于时差法的超声波测风传感器没有机械旋转部件,不存在机械磨损、卡涩、冰冻等问题;无惯性测量,灵敏度高,没有起动风速,具有稳定可靠、测量准确、对恶劣的工作环境具有一定的适应能力、免维护等特点,很好地克服了机械式测风设备固有的缺陷,因而能全天候正常工作。基于声共振法的超声波测风传感器具有体积紧凑、重量轻、坚固耐用等优点,能够承受强力冲击、剧烈的振动和极端的碰撞,此外由于尽可能减小了传感器的体积,因此很容易利用低功率加热器均匀地加热整个外壳,以确保传感器不结冰。(https://www.xing528.com)
(1)基于时差法的超声波测风传感器原理 超声波在空气中的传播速度,会和风向上的气流速度叠加。若超声波的传播方向与风向相同,它的速度会加快;反之它速度会变慢。因此,在固定的检测条件下,超声波在空气中传播的速度可以和风速函数相对应。基于时差法的超声波测风传感器具有4个超声波探头,形成2个互相垂直的测量路径,每个探头都具有超声波发送器和接收器,分别检测气流速度的垂直与水平分量,进行矢量叠加后即可得到实际的风速和风向。其原理如图2-2所示。
(2)基于声共振法的超声波测风传感器原理 基于声共振法的超声波测风传感器是利用超声波在小型腔室内的共振来测量风速和风向的。图2-3显示了基于声共振法的超声波测风传感器基本结构。
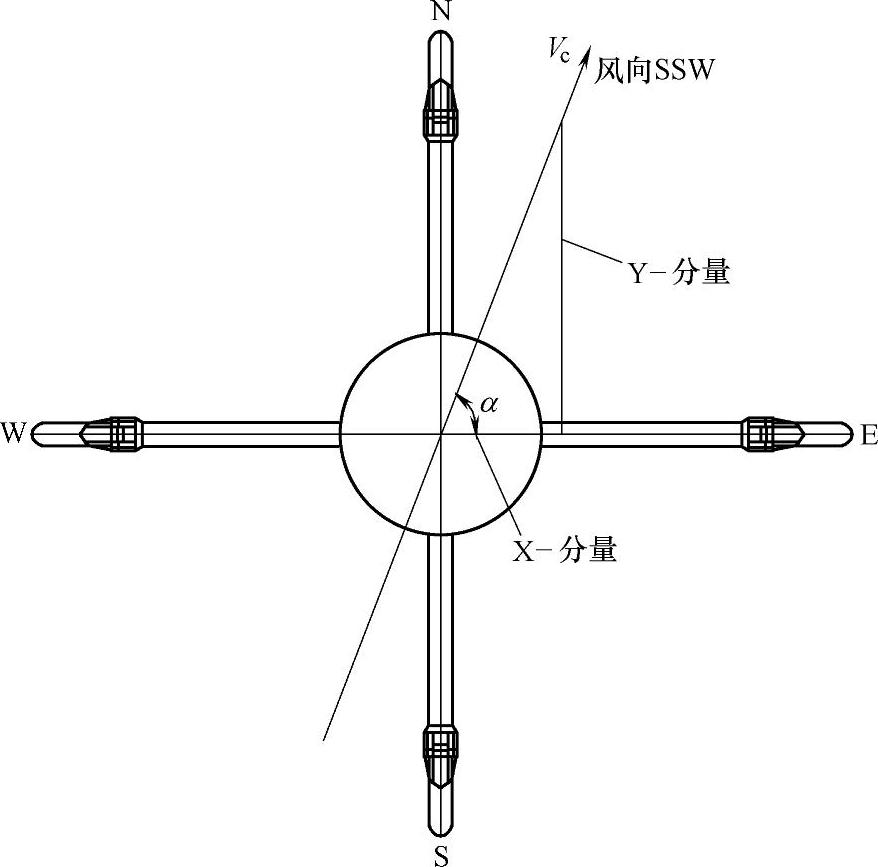
图2-2 基于时差法的超声波测风传感器测风原理
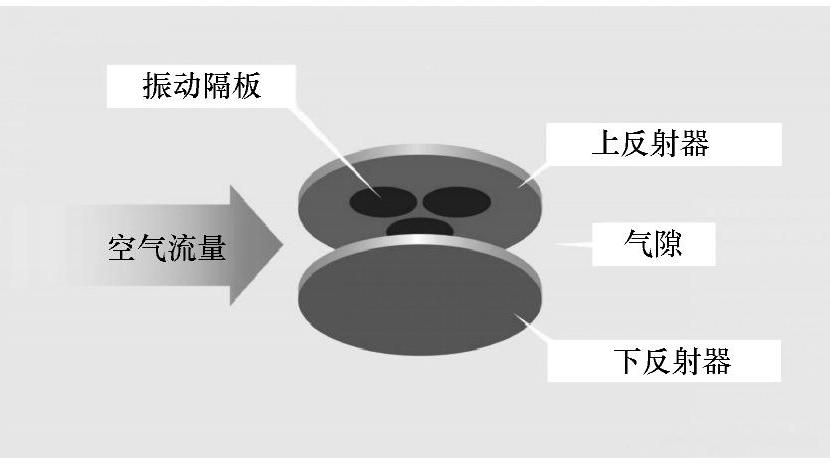
图2-3 基于声共振法的超声波测风传感器基本结构
基于声共振法的超声波测风传感器是由上下反射器构成1对小平行板组成。在水平方向上,气流可以在反射板之间不受限制地流动。在垂直方向上气流受到反射板的限制,因而在垂直方向的平均速度可以忽略不计。超声波由3个分别与压电元件耦合且呈三角形的振动膜片产生和接收,在任意时刻,均有1个膜片处于电激励状态。膜片下表面产生超声波并向外传播,直至到达上反射器进行近似全反射,由此产生的声波向下传播,到达下反射器并再次反射。超声波在反射器之间连续反弹,直到在气流中能量损失殆尽并充分衰减变为不完全反射。该过程约含有200次反射,每次反射将在1个窄频带中合并,导致信号强度急剧增强。该净波分布比较复杂,但可以被看作是1个垂直的半驻波和1个在同一水平面上二维径向波的合成。
利用声场的这种双重特征就可以准确地计算出风速和风向:利用行波特性,通过3个膜片可以测量沿三角形各边方向的气流分量,叠加这些分量即可得出气流的整体速度和方向;利用驻波特性,通过控制电路调整频率可以使声场响应最大化并保持共振,可以将温度、湿度及气压的变化对超声波在空气中的传播速度产生的影响进行自动补偿。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。