



1.通信方式
611U是一种通用型的伺服驱动器,可以根据不同的应用场合,使用工具软件SimoCo-mU,能很方便地进行各种参数的设定。RS232通信电缆是连接数控系统和PC(或611U和PC)的唯一途径。因此必须严格按照图4-9连接并保证机床电气柜的保护地与计算机的保护地共地,否则可能导致802Cbl、611U或计算机的硬件损坏。
2.SimoComU软件的基本操作
在通信电缆硬件连接完成后,需要检查611U驱动器参数P0801“togglingbetweenRS232/RS485”:参数应该设置为RS232(P0801=0),建议采用操作面板检查此参数。然后可以进行驱动器的参数设置,具体如下。
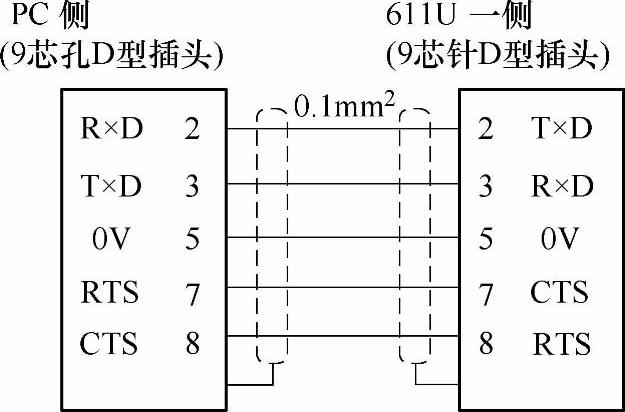
图4-9 SIMODRIVE611U串行电缆的连接
步骤1:启动SimoComU,对通信接口进行设置(即RS232),如图4-10所示。
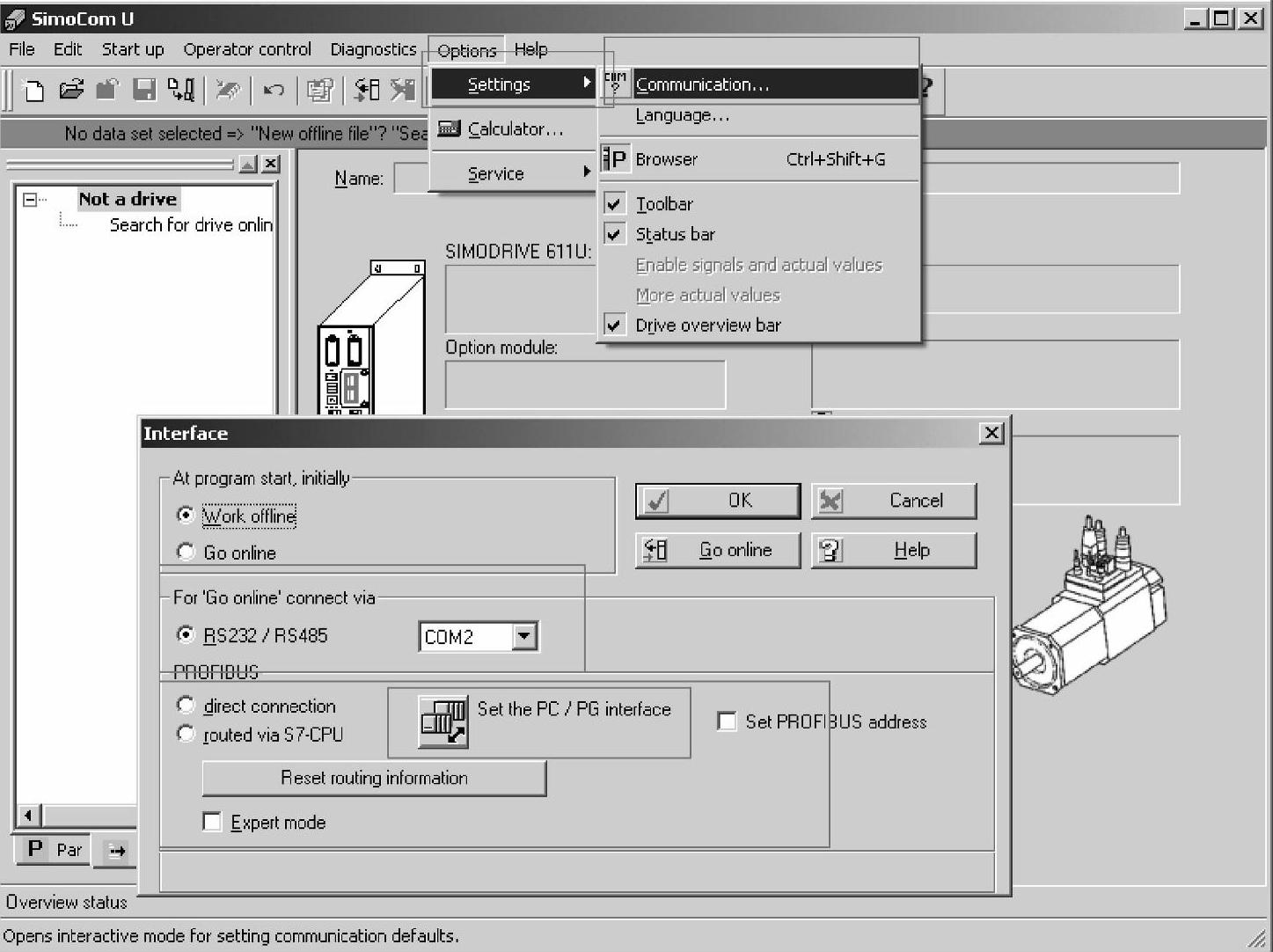
图4-10 通信方式设置
步骤2:自动查找设备,如图4-11所示。
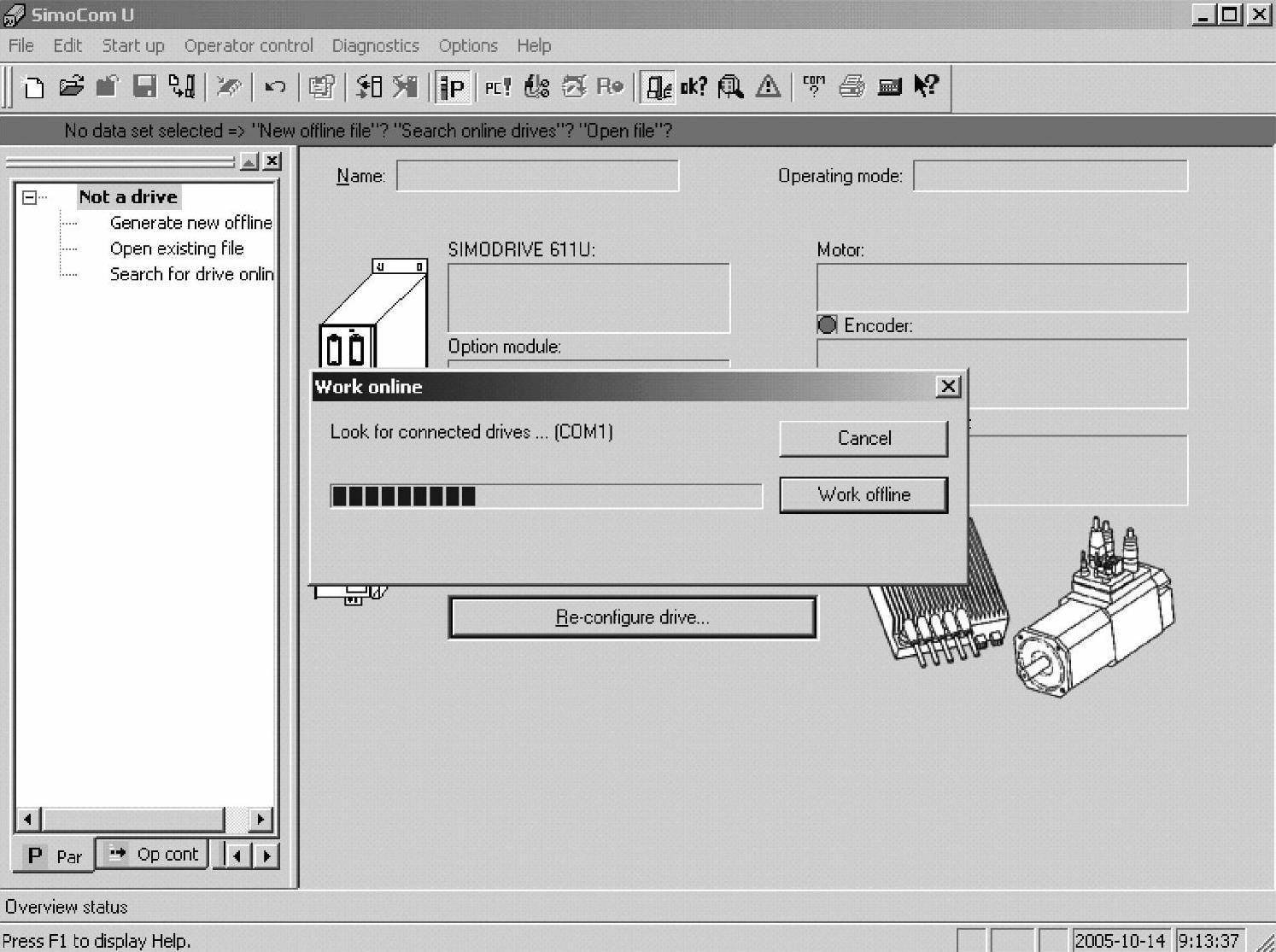
图4-11 自动查找设备
步骤3:进入配置传动选项,如图4-12所示。
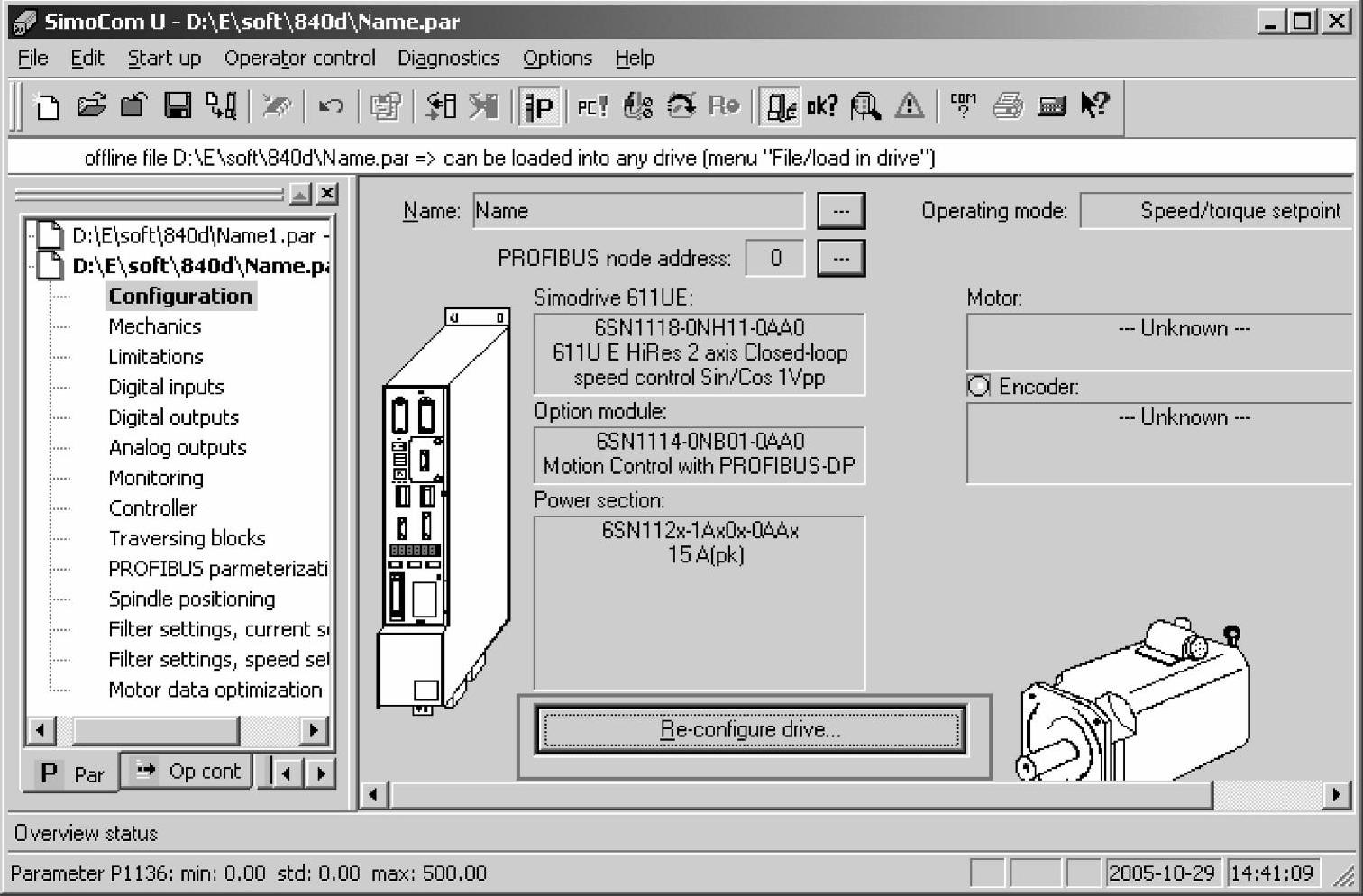
图4-12 配置传动选项
步骤4:在图4-13中输入传动名字,以便于更方便地辨识,此名字不是参数文件名。
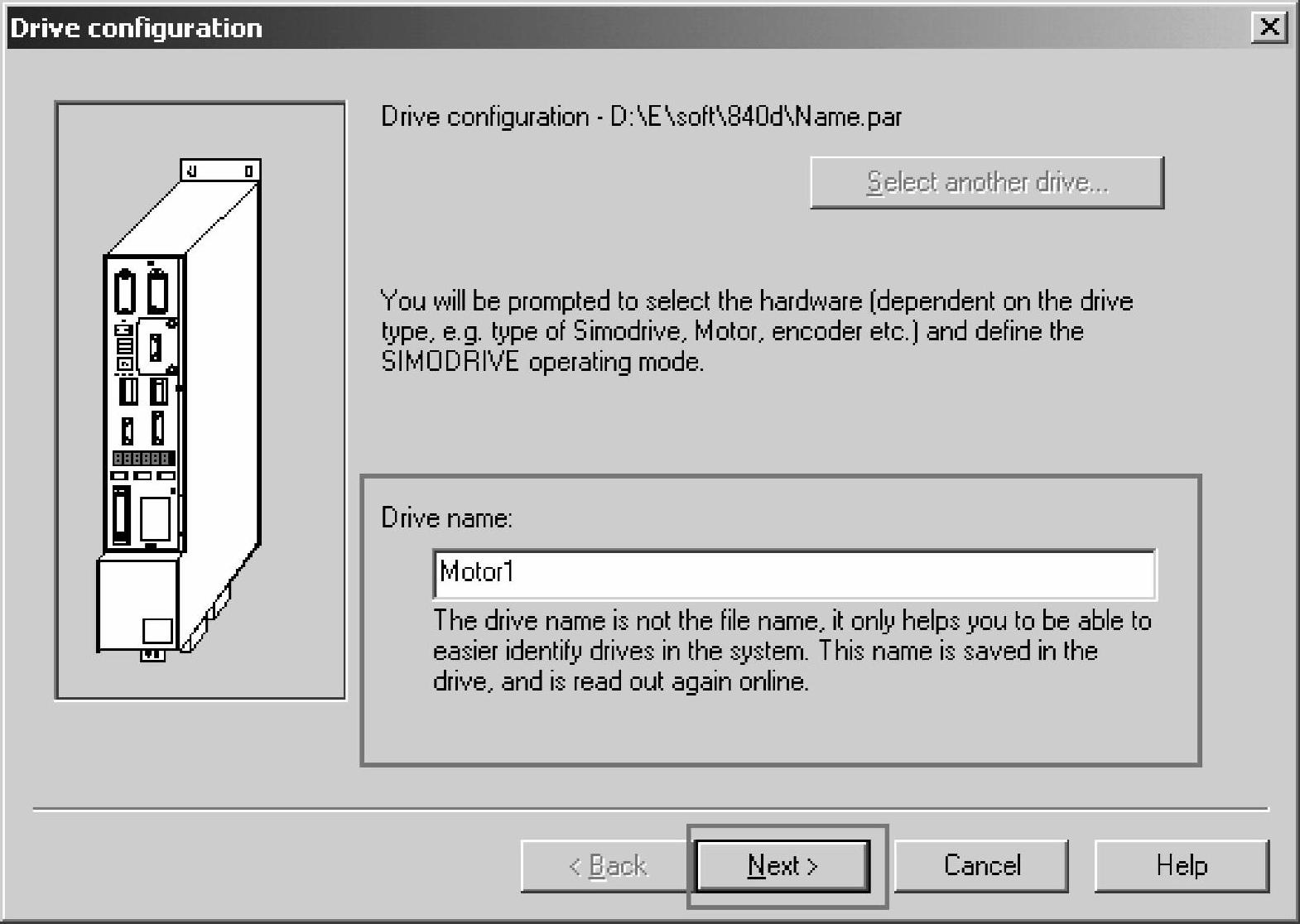
图4-13 输入电动机名称
步骤5:选择611U板卡类型(见图4-14)。
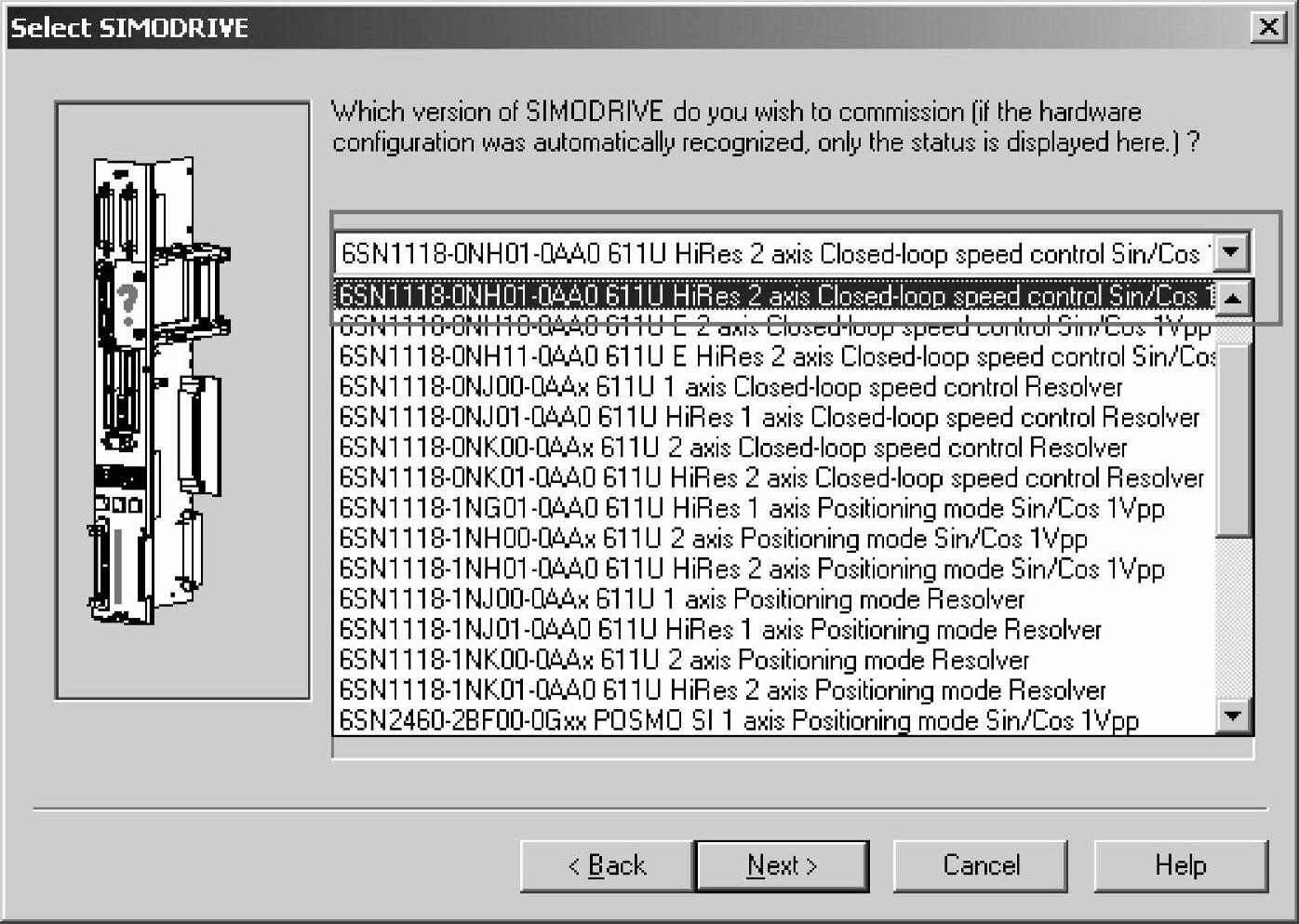
图4-14 选择611U板卡类型
步骤6:在图4-15中,选择可选件,比如PROFIBUS-DP卡。
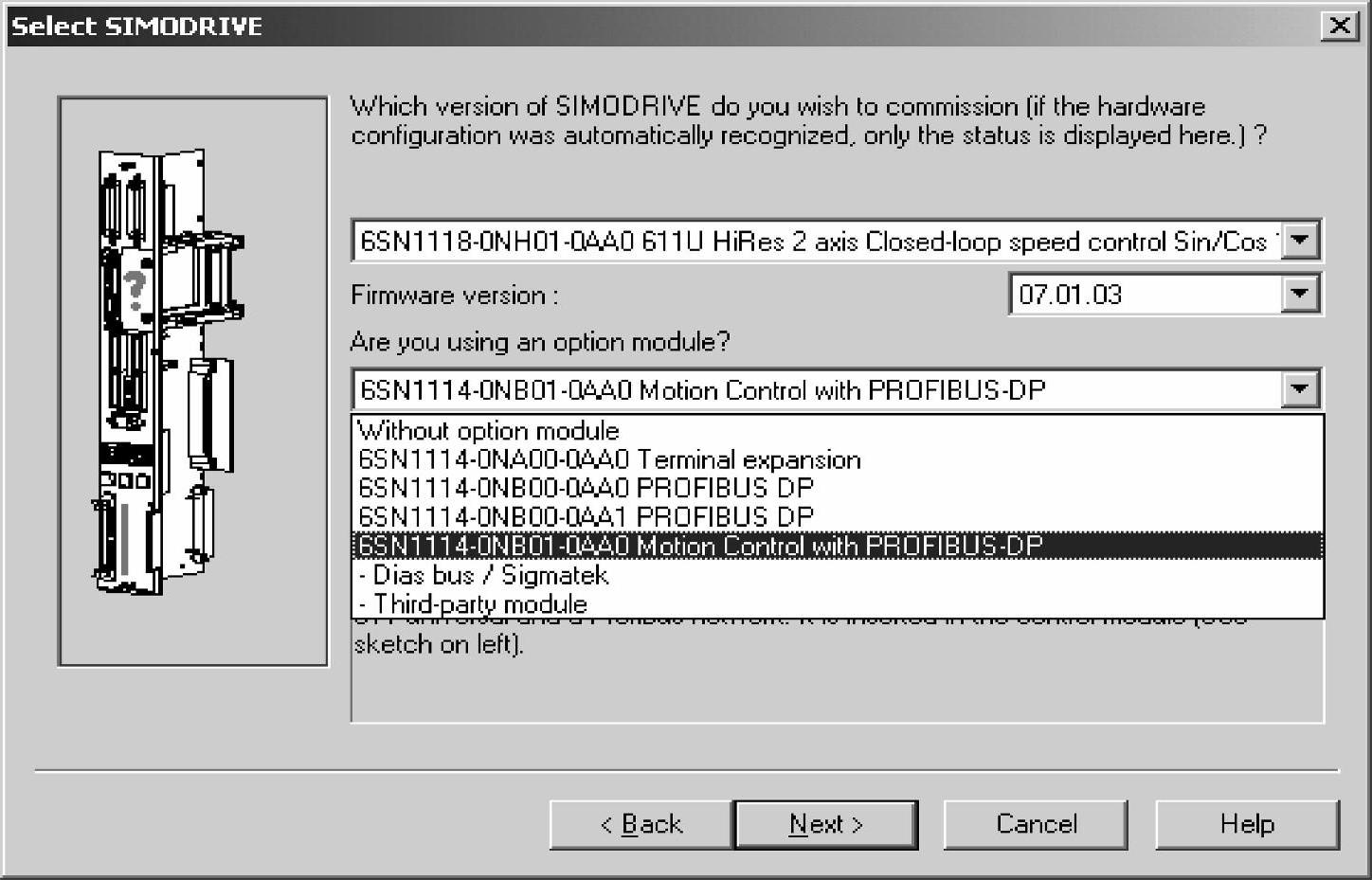
图4-15 选择可选件
步骤7:选择电动机的型号,如1T6084-XAH7X(见图4-16)。

图4-16 选择电动机的型号
步骤8:根据电动机所配置的编码器情况选择编码器类型,如图4-17所示,其中第一项是增量编码器,第二项为绝对值编码器。

图4-17 选择测量装置(编码器类型)
步骤9:选择速度控制方式(见图4-18)。
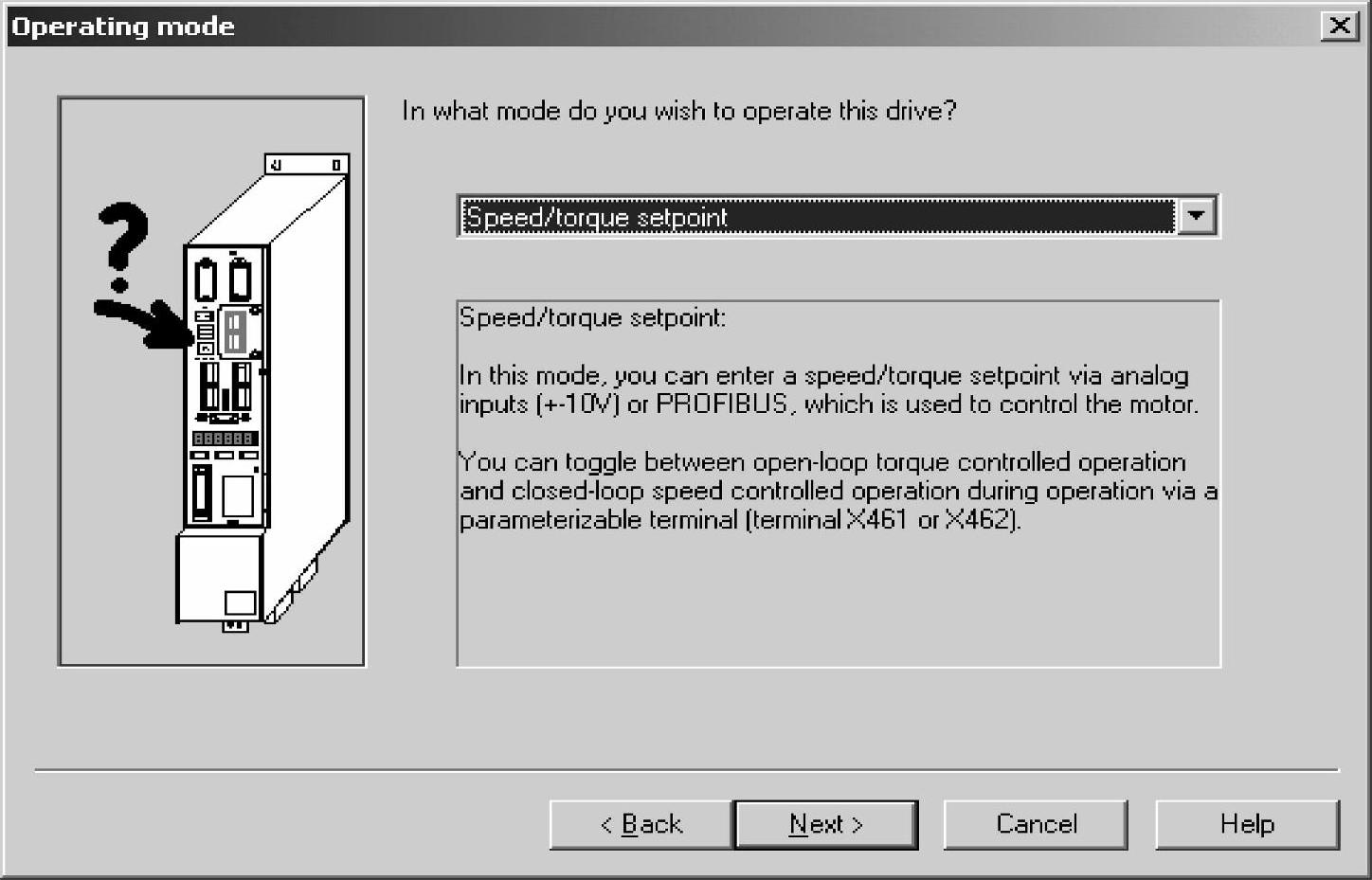
图4-18 选择速度控制方式
步骤10:SimoComU列出所选择的数据,如果数据无误,选择“接受该驱动器配置”,如图4-19所示。
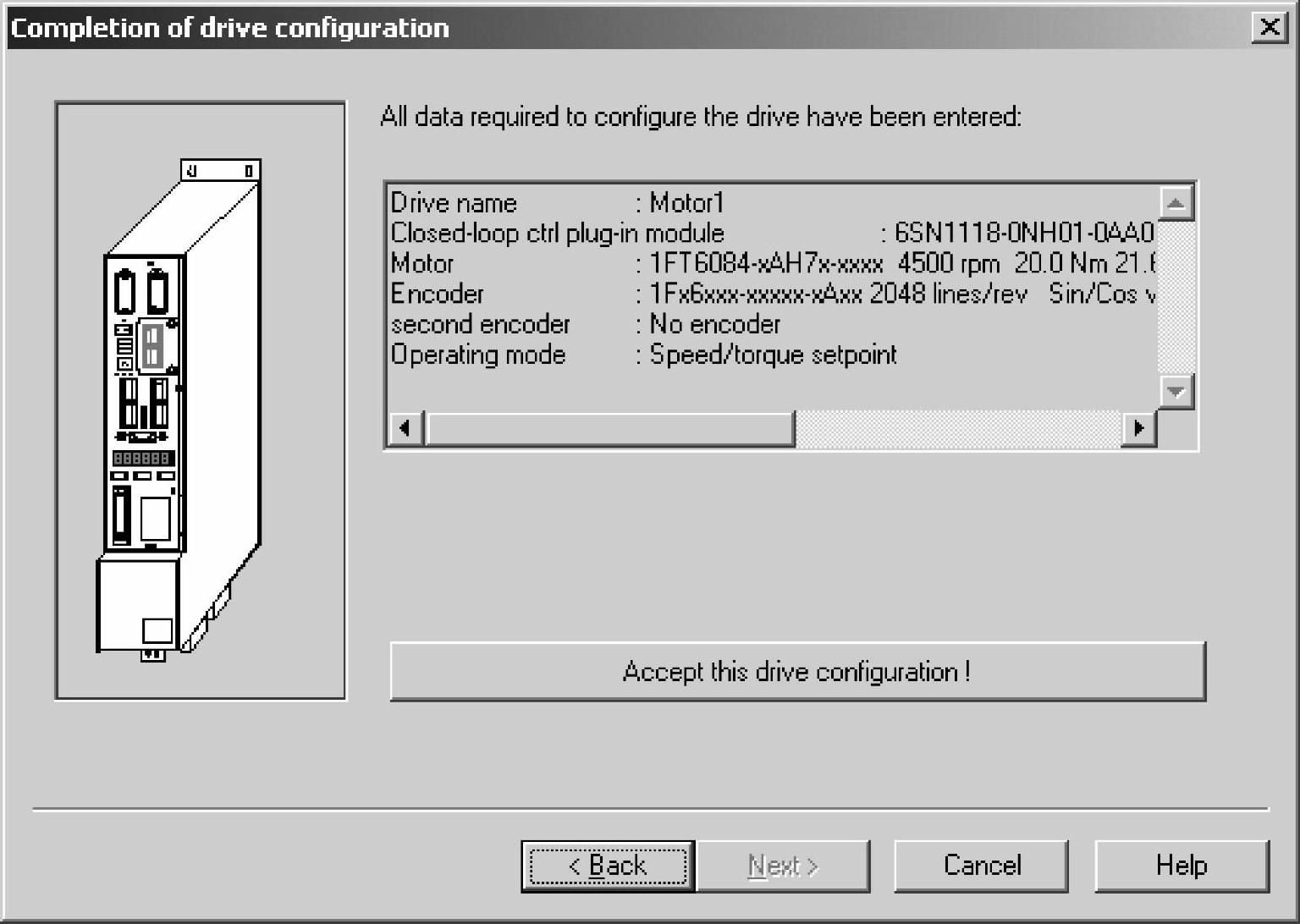
图4-19 接收数据
步骤11:可以在图4-20中进行参数修改,包括传动名字、可选件PROFIBUS地址等。(https://www.xing528.com)
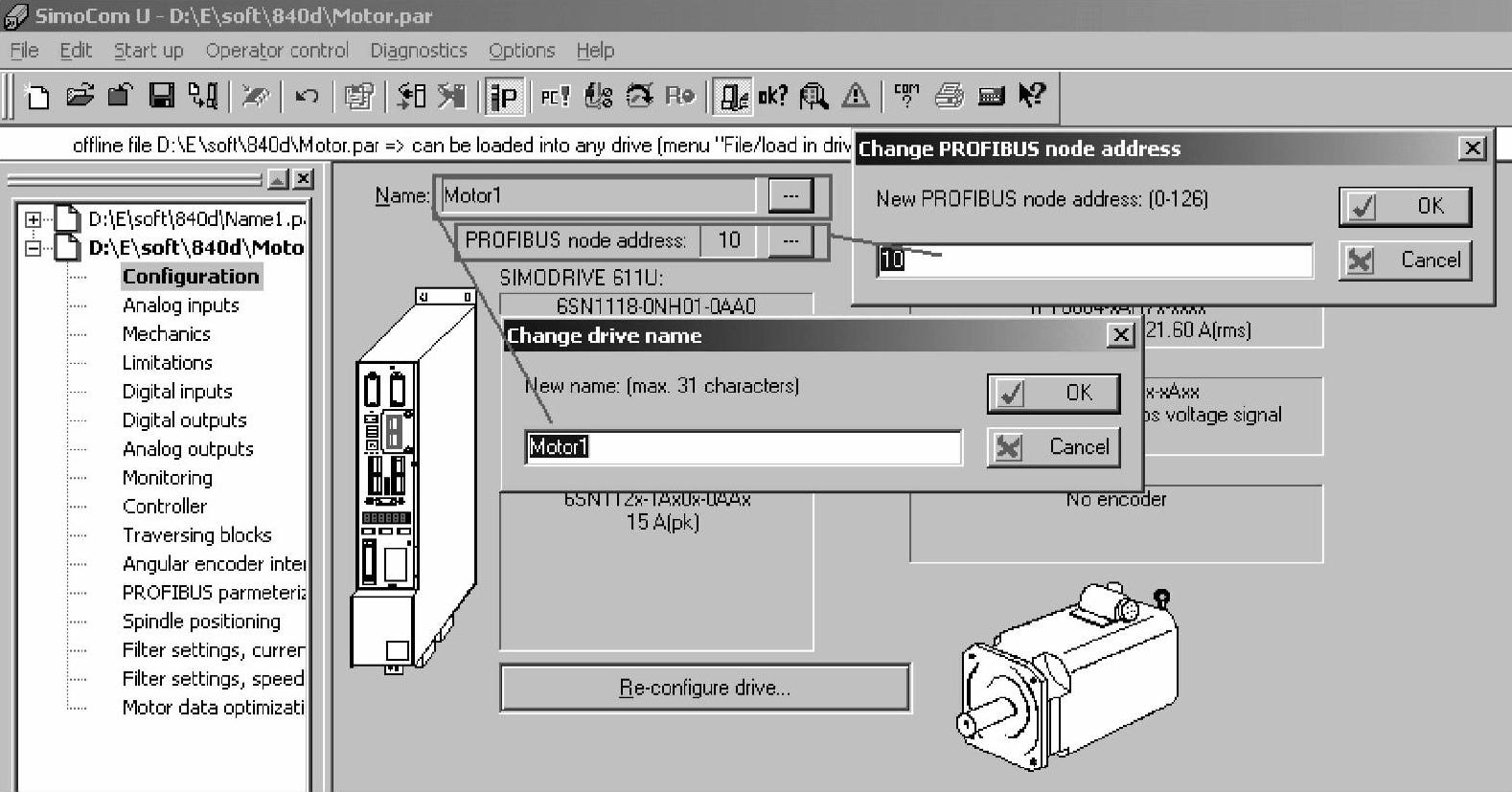
图4-20 参数修改
步骤12:选择联机后,进行PC操作,同时进行优化等流程操作(见图4-21)。
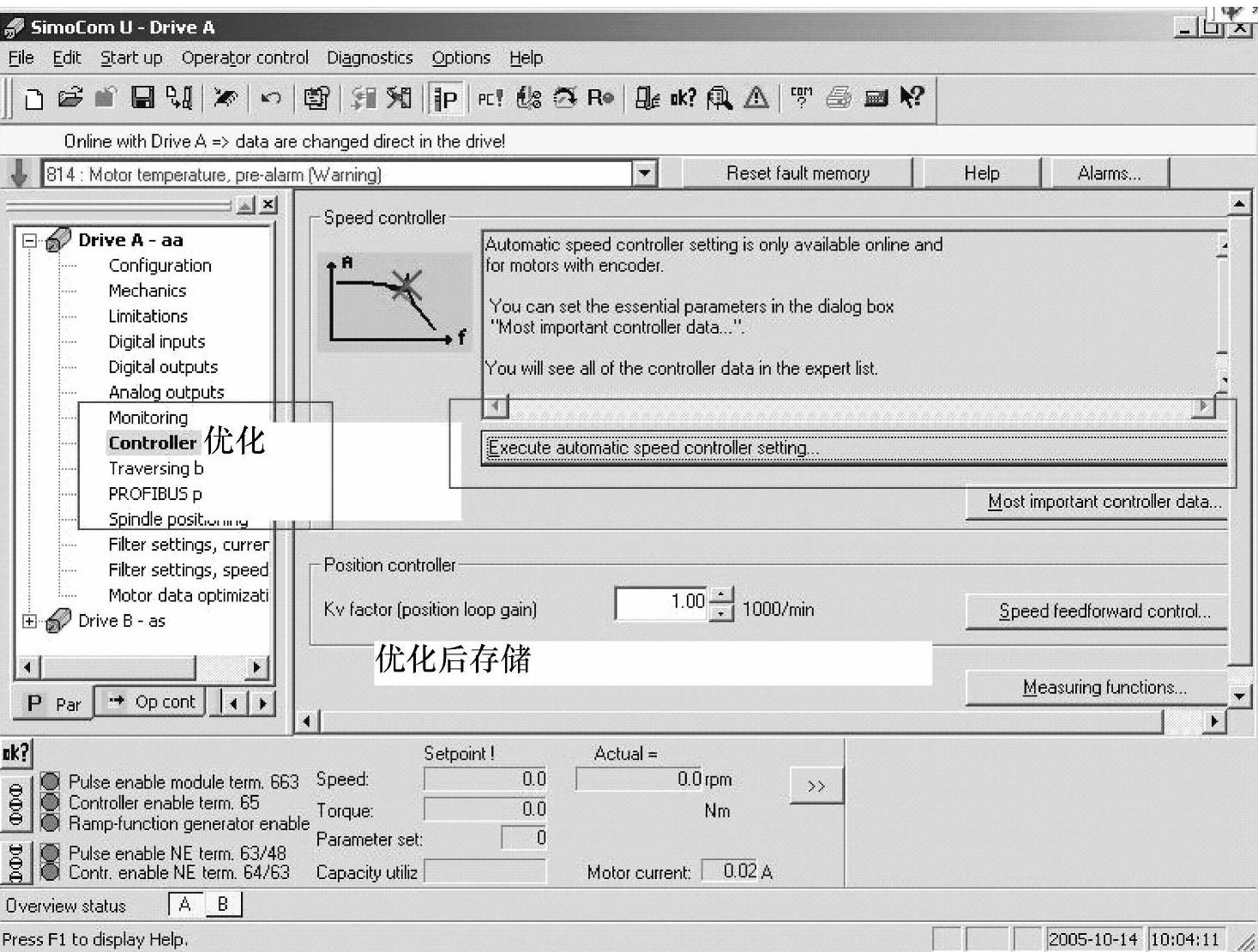
图4-21 参数优化
步骤13:如图4-22所示进行电动机在线运行操作(即通过PC上的软件进行操作)。
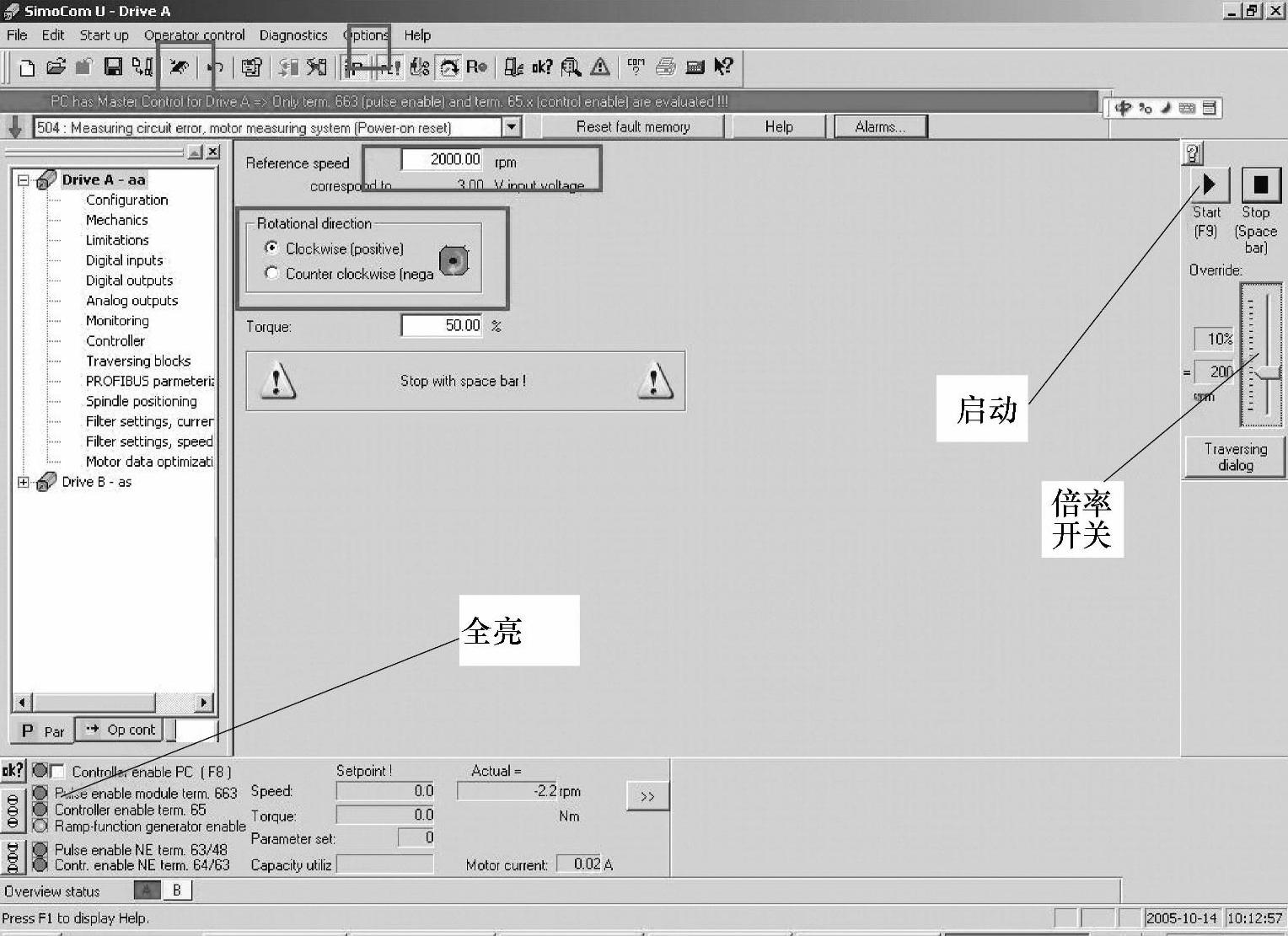
图4-22 电动机运行操作
步骤14:可以对传动参数进行在线复位(见图4-23)。
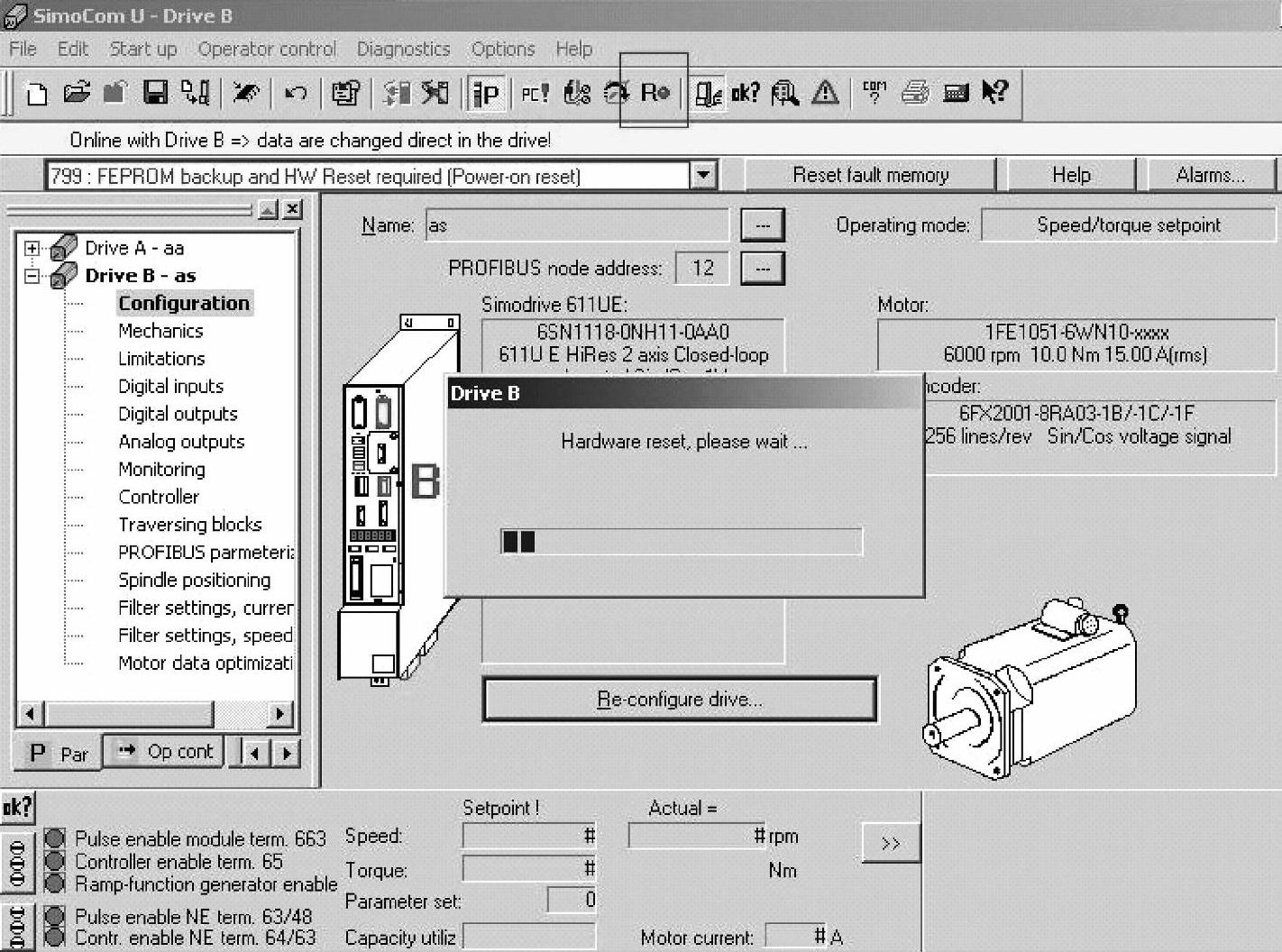
图4-23 传动复位
步骤15:将调试好的参数保存到.par中(见图4-24)。

图4-24 参数保存
步骤16:打开已经保存过的参数文件,可以下载该参数到611U驱动器中去(见图4-25)。这对于传动的调试具有极大的好处,尤其是批量传动调试。
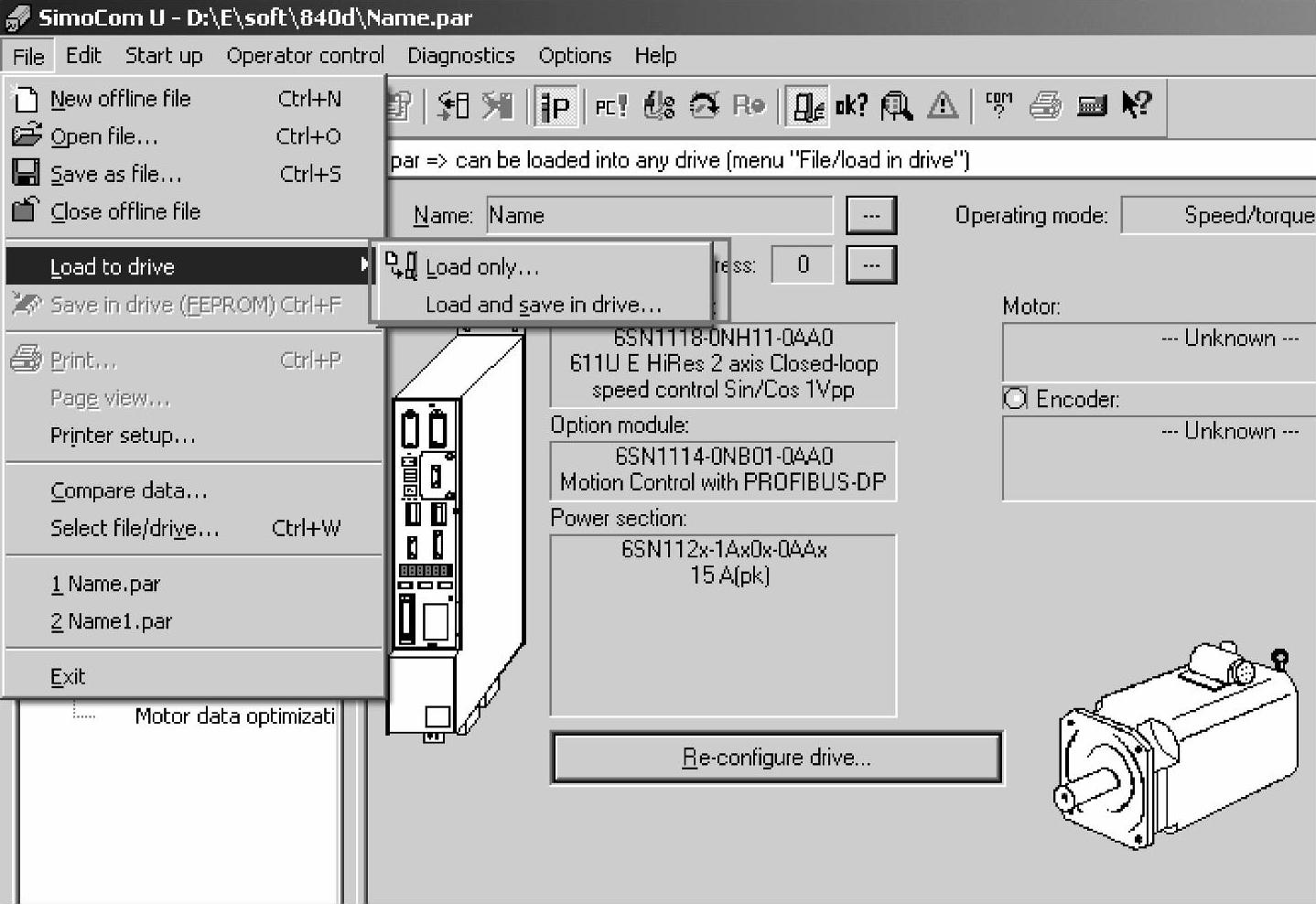
图4-25 参数下载
3.SimoComU软件的高级操作
对611U驱动器和电动机系统进行硬件设置后,还需要对机械部分等工艺进行实时调节和设置,这个过程被称为SimoComU软件的高级操作。
对机械部分的各个构成进行组态,特别是丝杠的导程,在实际调试中,由于伺服电动机的连轴节及原点的位置等原因,电动机的运行方向与实际的预想方向相反,为此在机械部分设定中,对设定点的位置值取反,以便改变电动机的旋转方向(见图4-26)。
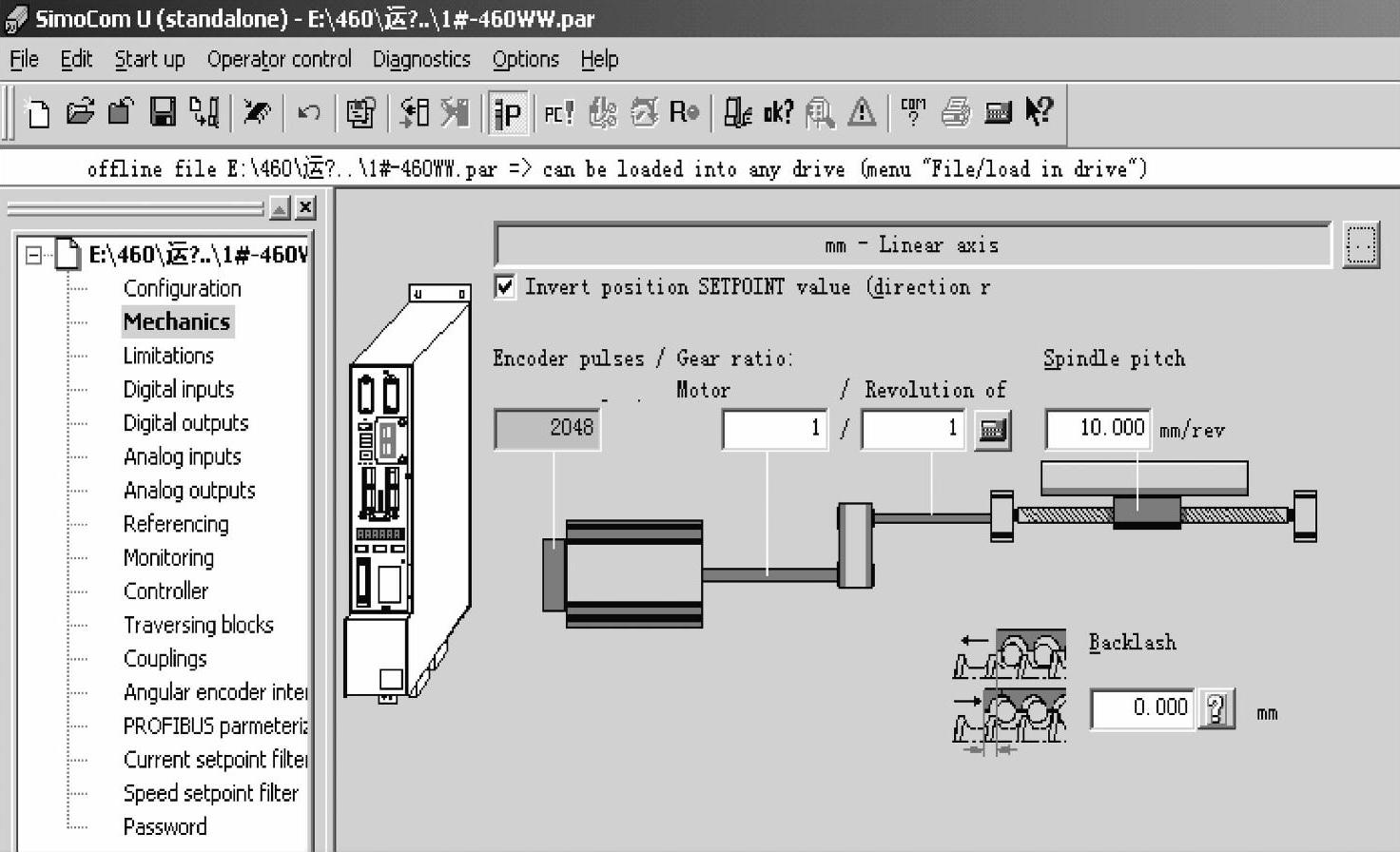
图4-26 机械部分调试
首先对机械部分进行设置,为减少伺服电动机的报警及过载,要适当地设置其最大速度及加减速,由于伺服电动机的最大转速为3000r/min,故最大转速设定为3000,而加减速通过实际进行调整。比如在实际调试过程中,预先设置为1200,可以正常工作,考虑伺服电动机工作的稳定性及动作完成的时间,故设置为1000(见图4-27)。
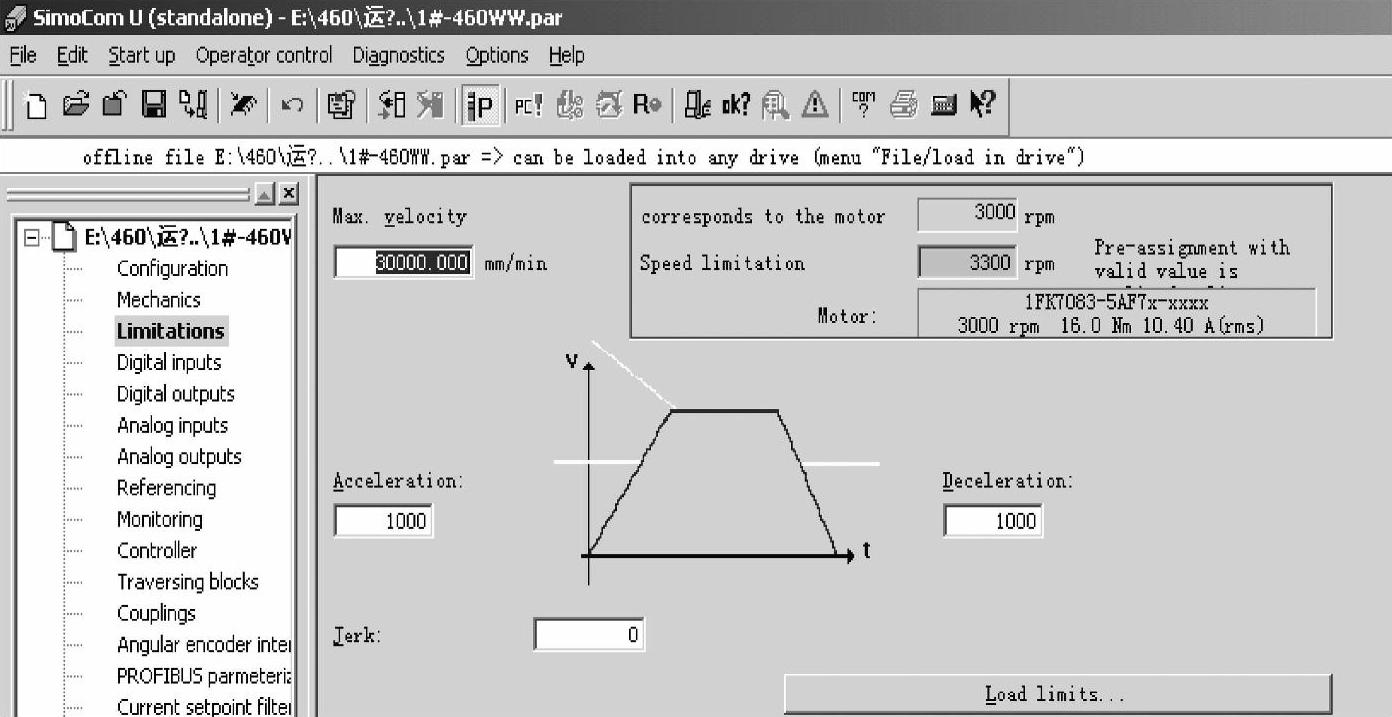
图4-27 修改速度和加减速值
接下来还需要定义611U伺服驱动模块的各个输入点的功能。如图4-28~图4-30所示,主要是设置了找原点、手动前进、手动后退、各个步进块等的输入功能和参考点到位、报警等的输出功能。
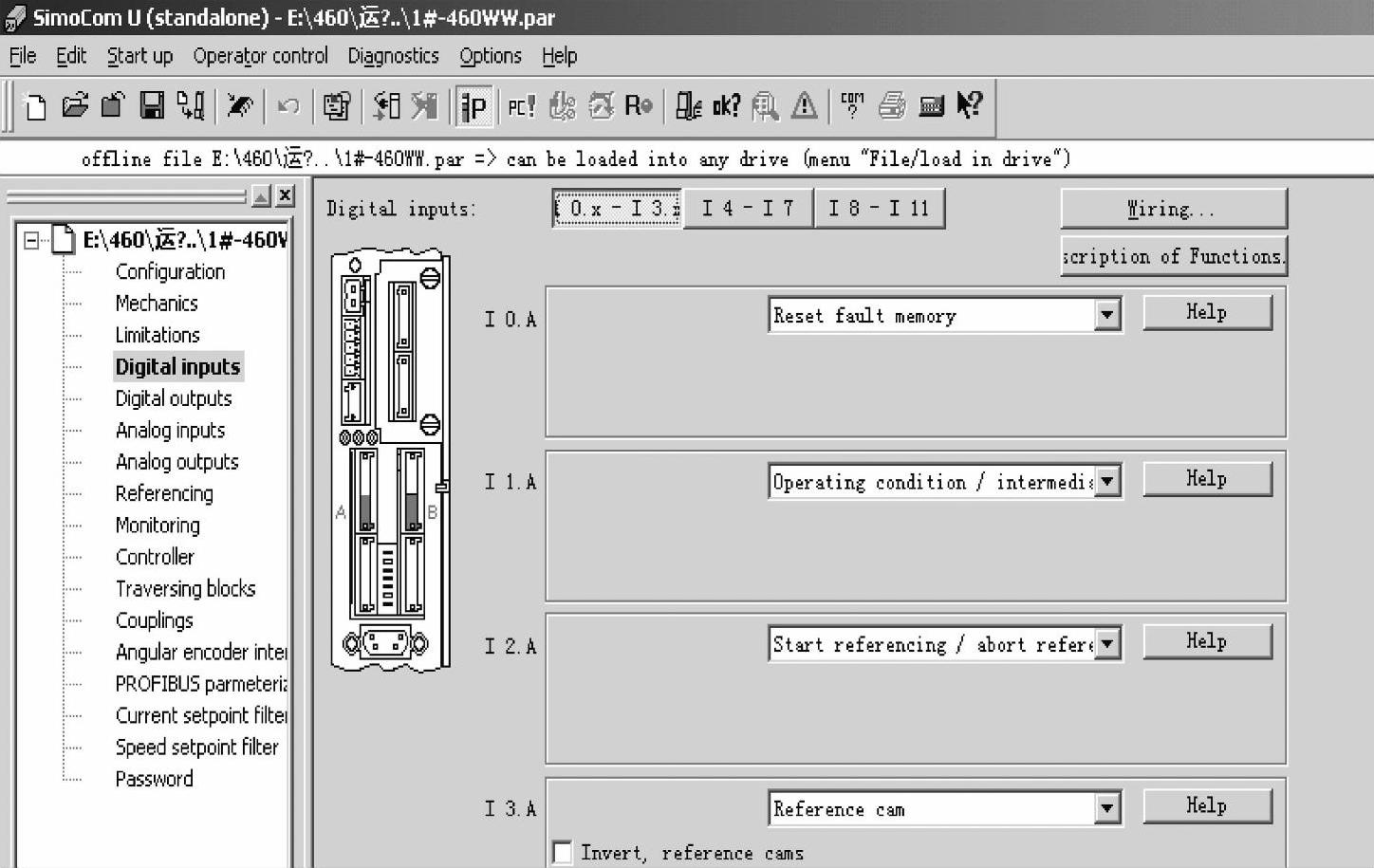
图4-28 输入部分定义一
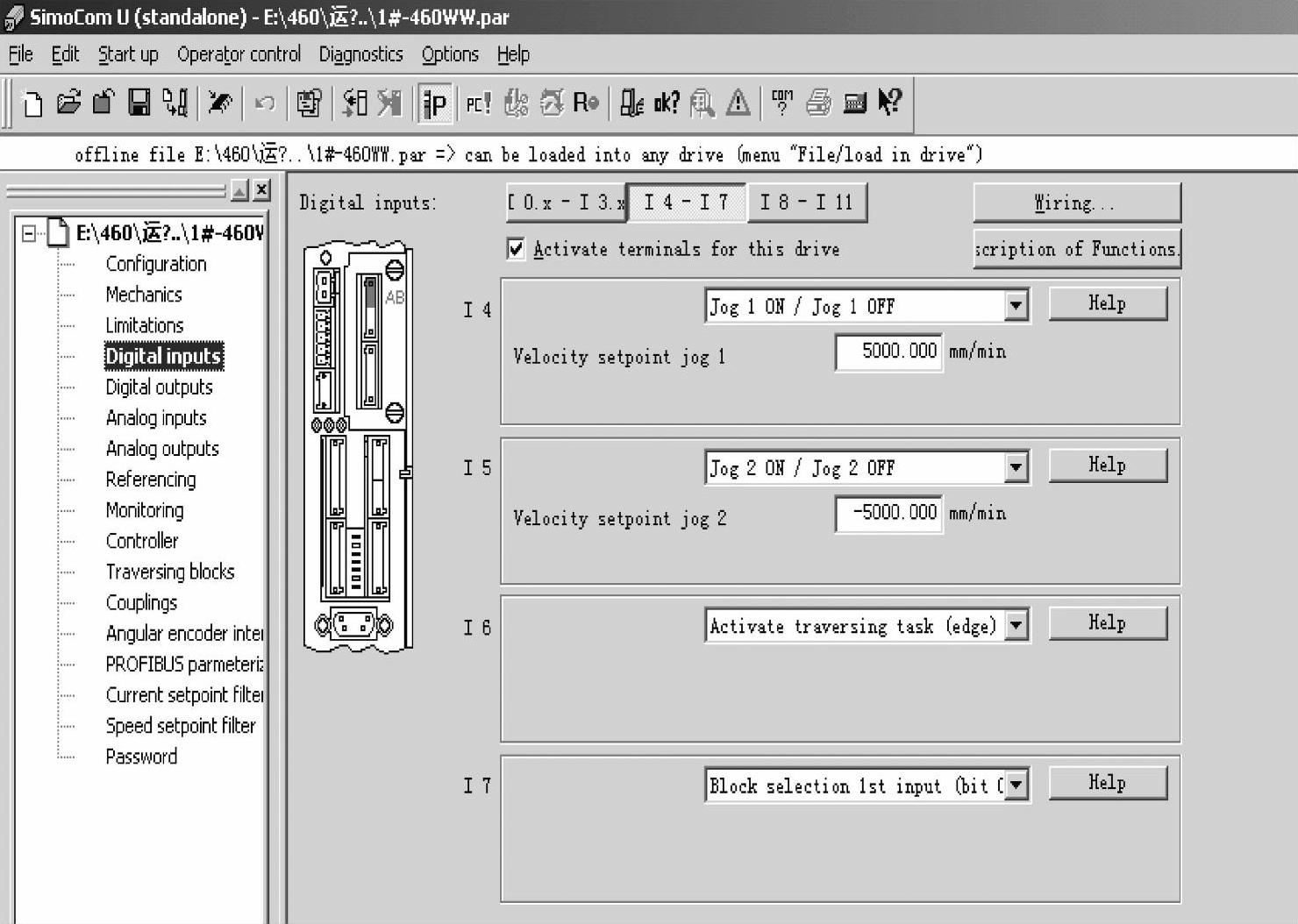
图4-29 输入部分定义二
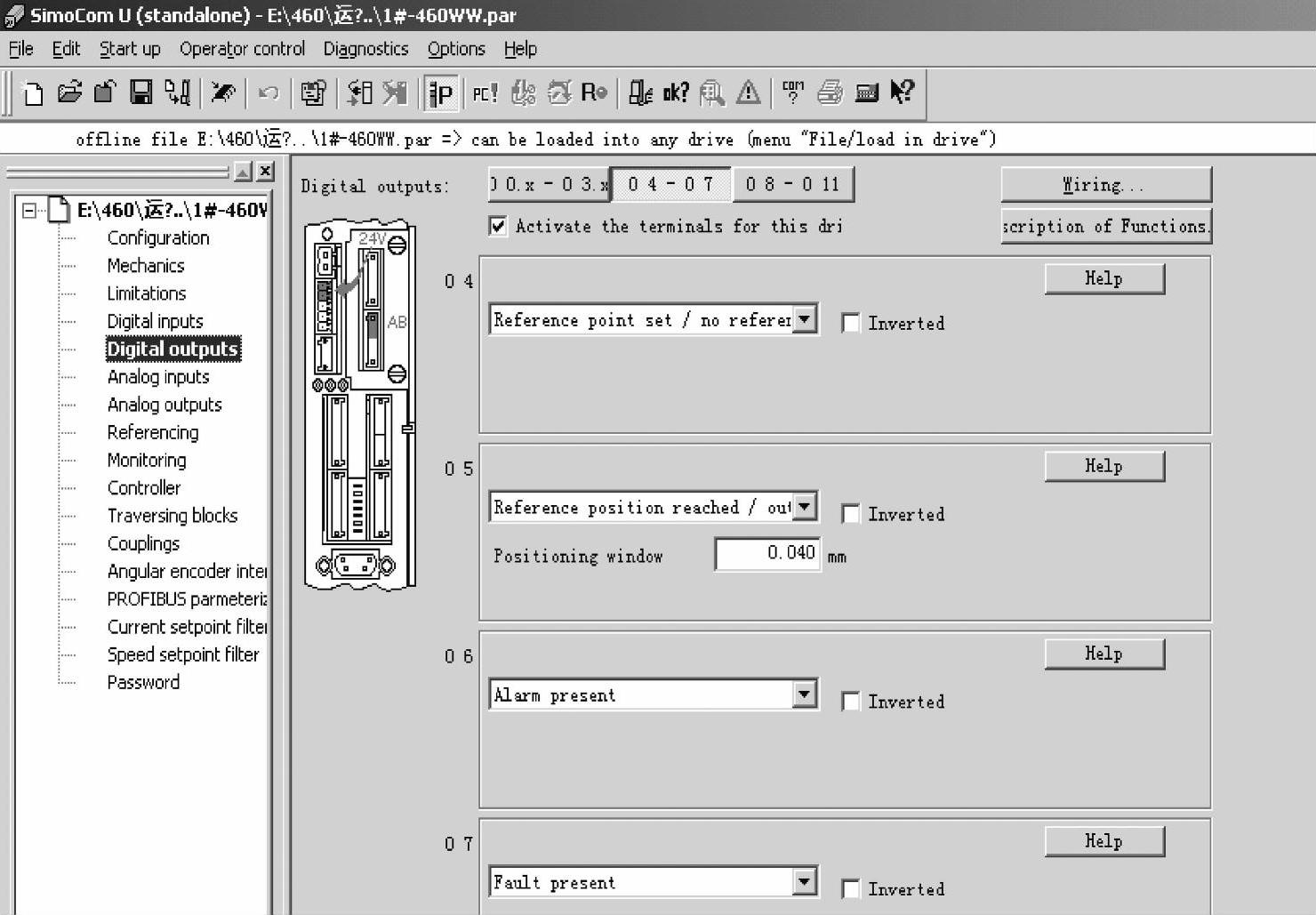
图4-30 输出部分定义
最后要对传送块做定义,各个传送块横移时,伺服电动机根据程序设计,要求设计每步以何速度、以何方向运作,所需要走到的位置值。每个块前的块号对应程序中执行的步号传送块定义如图4-31所示。
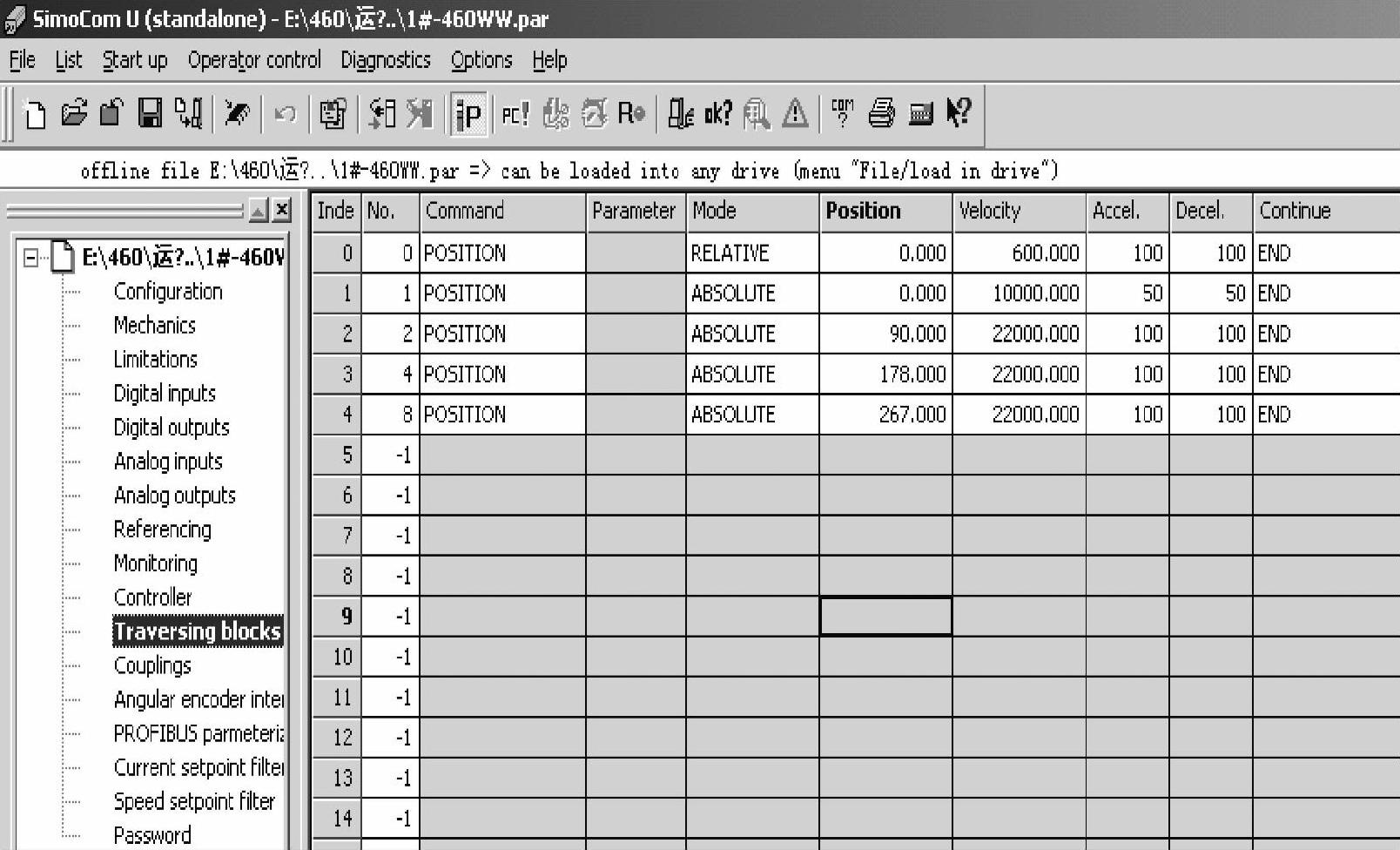
图4-31 传送块定义
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。