



【摘要】:按照一对齿轮的变位系数之和xΣ=x1+x2的取值情况不同,可将变位齿轮传动分为以下三种基本类型。零传动 若一对齿轮的变位系数之和为零,则称为零传动。为了避免根切,两轮齿数均需大于zmin。另一种是两轮的变系数绝对值相等,即x1=-x2,这种齿轮传动称为高度变位齿轮传动。高度变位可以在不改变中心距的前提下合理协调大小齿轮的强度,有利于提高传动的工作寿命。表2-28 齿轮变位类型及性能、特点
按照一对齿轮的变位系数之和xΣ=x1+x2的取值情况不同,可将变位齿轮传动分为以下三种基本类型。
(1)零传动 若一对齿轮的变位系数之和为零(x1+x2=0),则称为零传动。零传动又可分为两种情况。一种是两齿轮的变位系数都等于零(x1=x2=0),这种齿轮传动就是标准齿轮传动。为了避免根切,两轮齿数均需大于zmin。另一种是两轮的变系数绝对值相等,即x1=-x2,这种齿轮传动称为高度变位齿轮传动。采用高度变位必须满足齿数和条件:z1+z2≥2zmin。
高度变位可以在不改变中心距的前提下合理协调大小齿轮的强度,有利于提高传动的工作寿命。
(2)正传动 若一对齿轮的变位系数之和大于零(x1+x2>0),则这种传动称为正传动。因为正传动时实际中心距a′>a,因而啮合角α′>α,因此也称为正角度变位。正角度变位有利于提高齿轮传动的强度,但使重合度略有减少。
(3)负传动 若一对齿轮的变位系数之和小于零(x1+x2<0),则这种传动称为负传动。负传动时实际中心距a′<a,因而啮合角α′<α,因此也称为负角度变位。负角度变位使齿轮传动强度削弱,只用于安装中心距要求小于标准中心距的场合。为了避免根切,其齿数和条件为z1+z2>2zmin。(https://www.xing528.com)
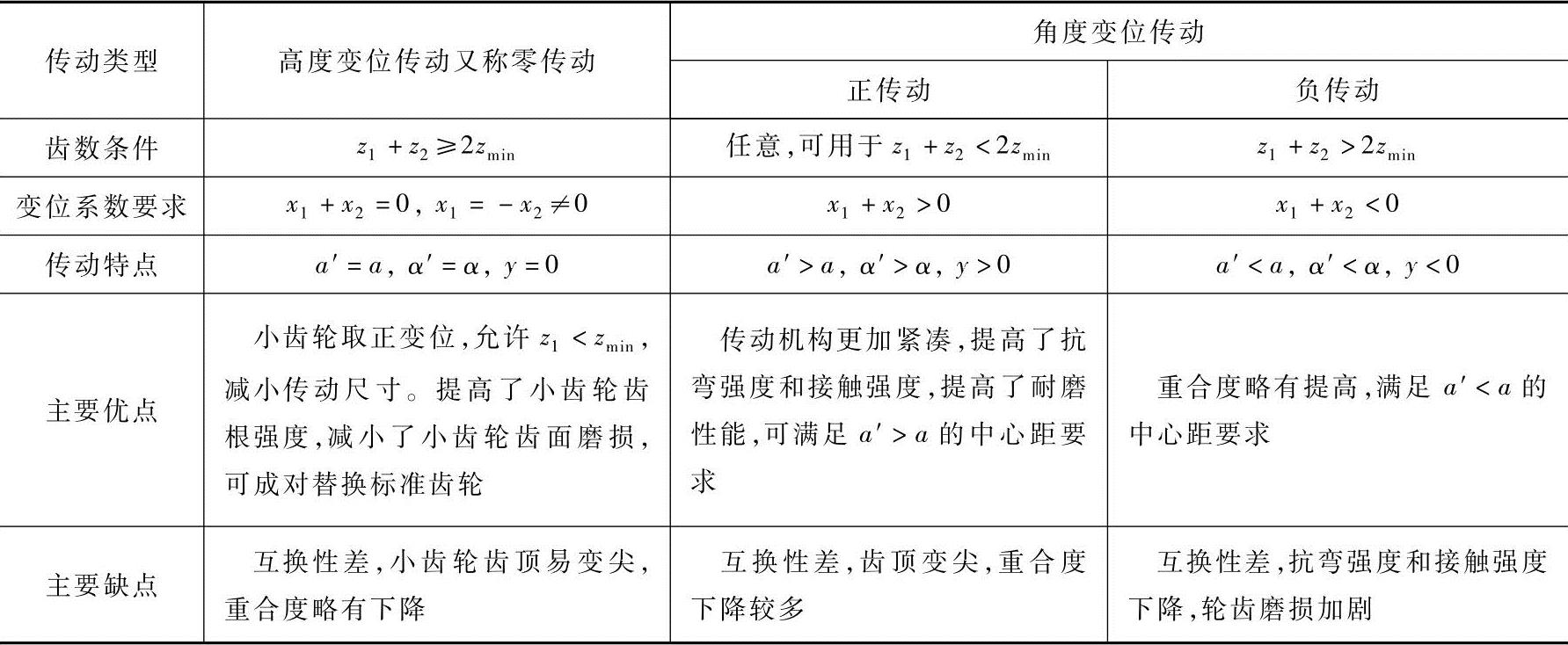
齿轮变位类型及性能、特点汇总于表2-28。
表2-28 齿轮变位类型及性能、特点
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。