



GB/T 10089—1988按蜗杆传动的最小法向侧隙大小,将侧隙种类分为8种,即a、b、c、d、e、f、g和h,最小法向侧隙值以a为最大,h为零,其他依次减小。侧隙种类与精度等级并无直接关系。蜗杆传动的侧隙要求,应根据工作条件和使用要求选择侧隙的种类,并用其代号(字母)表示。各种侧隙的最小法向侧隙jnmin数值见表8-27。对可调中心距传动或蜗杆、蜗轮不要求互换的传动,允许传动的侧隙规范用最小侧隙jtmin(或jnmin)和最大侧隙jnmax(或jnmax)来规定,由设计者确定。
传动的最小法向侧隙由蜗杆齿厚的减薄量来保证,即取蜗杆齿厚上偏差Ess1=-(jnmin/cosαn+EsΔ),齿厚下偏差Esi1=Ess1-Ts1;EsΔ为制造误差的补偿部分。最大法向侧隙由蜗杆、蜗轮齿厚公差Ts1、Ts2确定。Essl、Tst、Ts2值见表8-28~表8-30。蜗轮齿厚上偏差Ess2=0,下偏差Esi2=-Ts2。各精度等级的Ts1、EsΔ和Ts2数值见表8-28~表8-30。对可调中心距传动或不要求互换的传动,其蜗轮的齿厚公差可不作规定,蜗杆齿厚的上、下偏差由设计者确定。
对于各种侧隙种类的侧隙规范数值系蜗杆传动在20℃时的情况,未计入传动发热和传动弹性变形的影响。但是,在设计确定侧隙时,则应考虑这些因素的影响,侧隙既为润滑剂提供存储条件,又能满足传动发热而产生热胀的要求。侧隙的大小是影响蜗杆传动正常啮合的重要因素。侧隙过大,会产生反向传动的冲击;侧隙过小,可能出现齿面两侧接触而发生卡齿,加大发热和噪声。因此,合理选择最小侧隙是保证蜗杆传动精度的重要因素之一。按法向模数mn选择一般蜗杆传动的法向侧隙的范围,见图8-1。
GB/T 10089规定的侧隙种类与精度并无直接关系,可以参照经验,根据工作条件和使用要求进行选择。生产中也可按下列关系选择:侧隙种类a、b、c、d、(e、f、g、h)分别对应的第Ⅰ公差组精度等级为5~12、3~12、3~9、3~8、1~6。
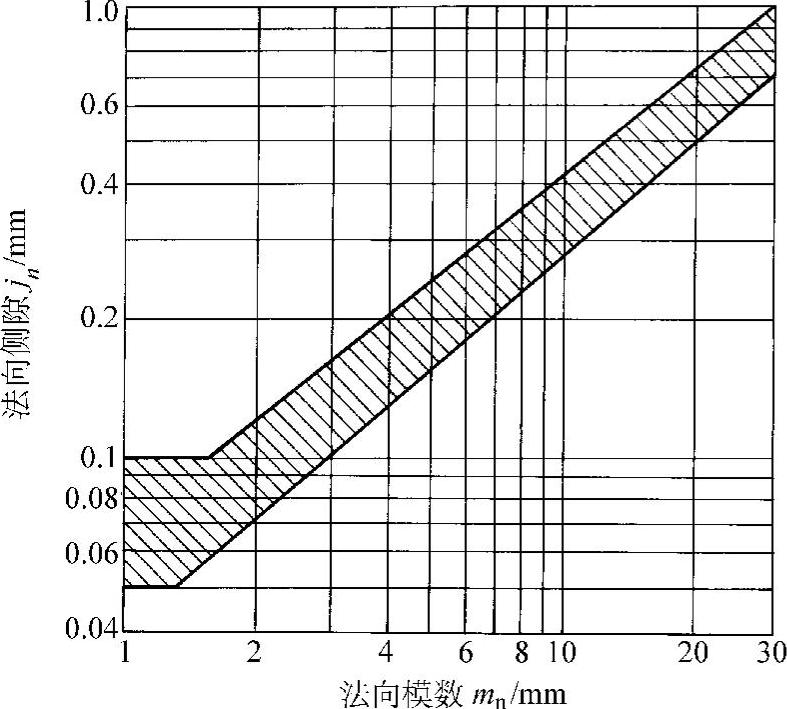
图8-1 蜗杆传动法向侧隙
表8-27 传动的最小法向侧隙jnmin值(摘自GB/T 10089—1988) (μm)
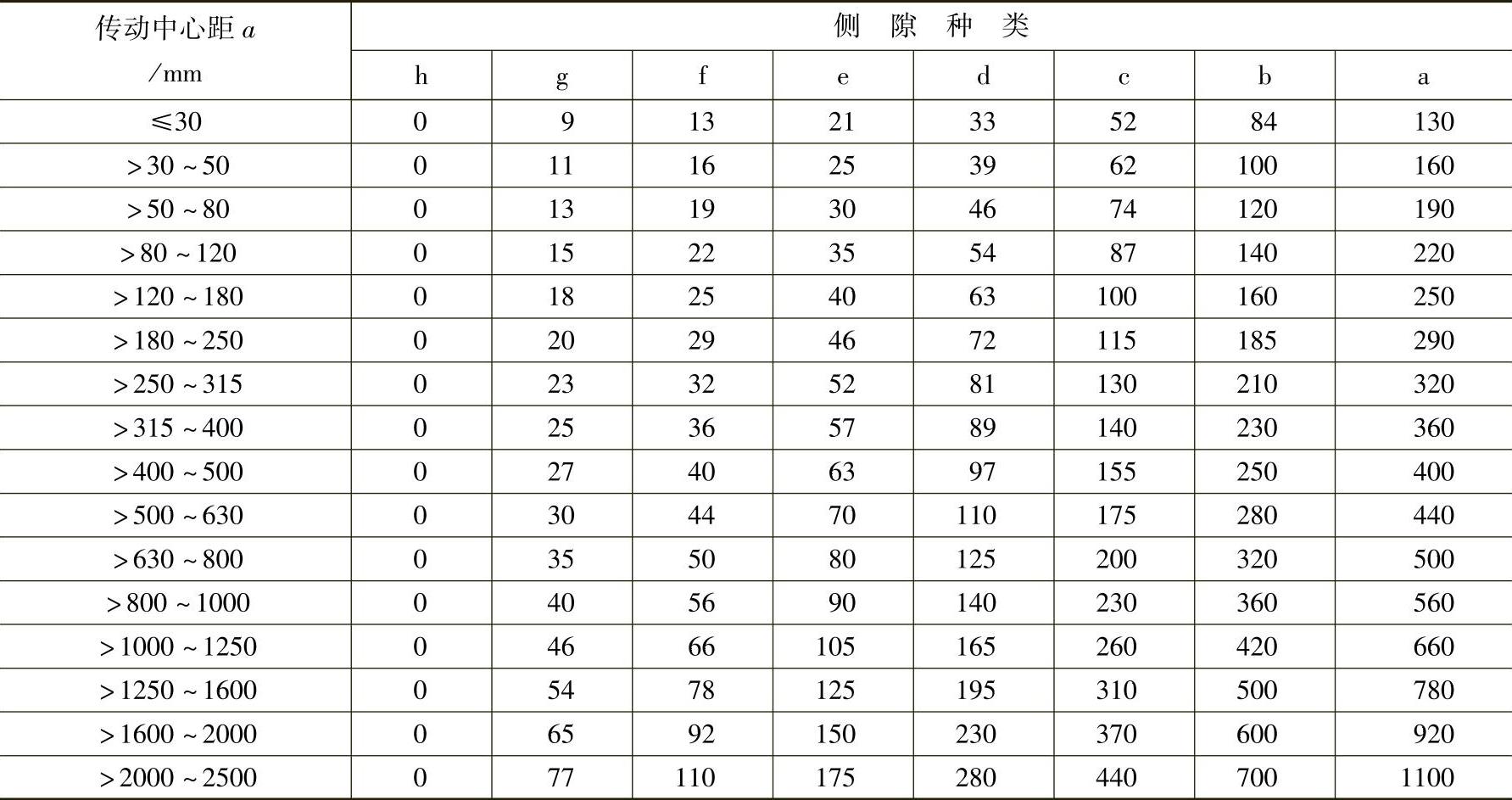
注:传动的最小圆周侧隙jtmin≈jnmin/cosγ′cosαn
式中,γ′为蜗杆节圆柱量程角;αn为蜗杆法向齿形角。
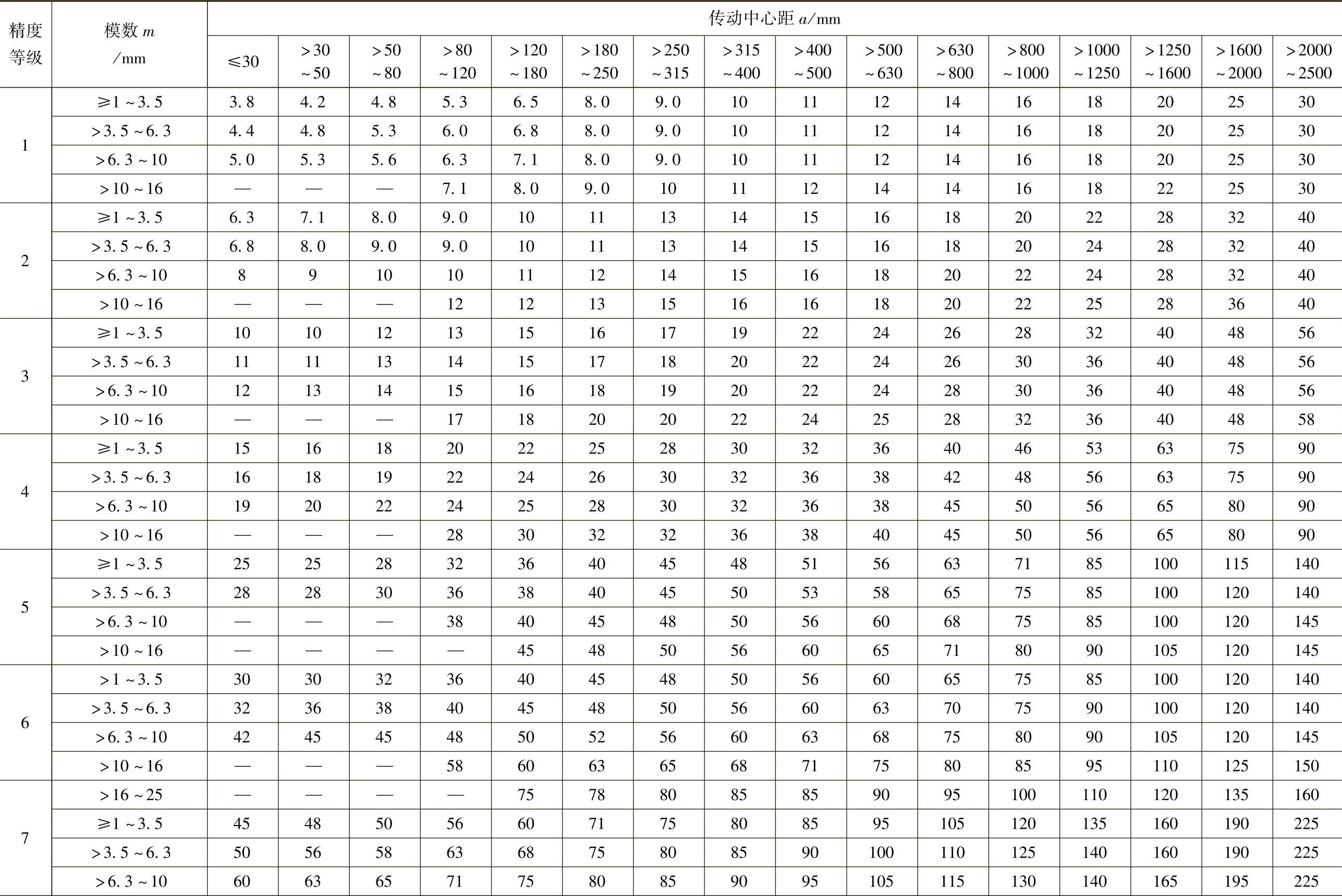
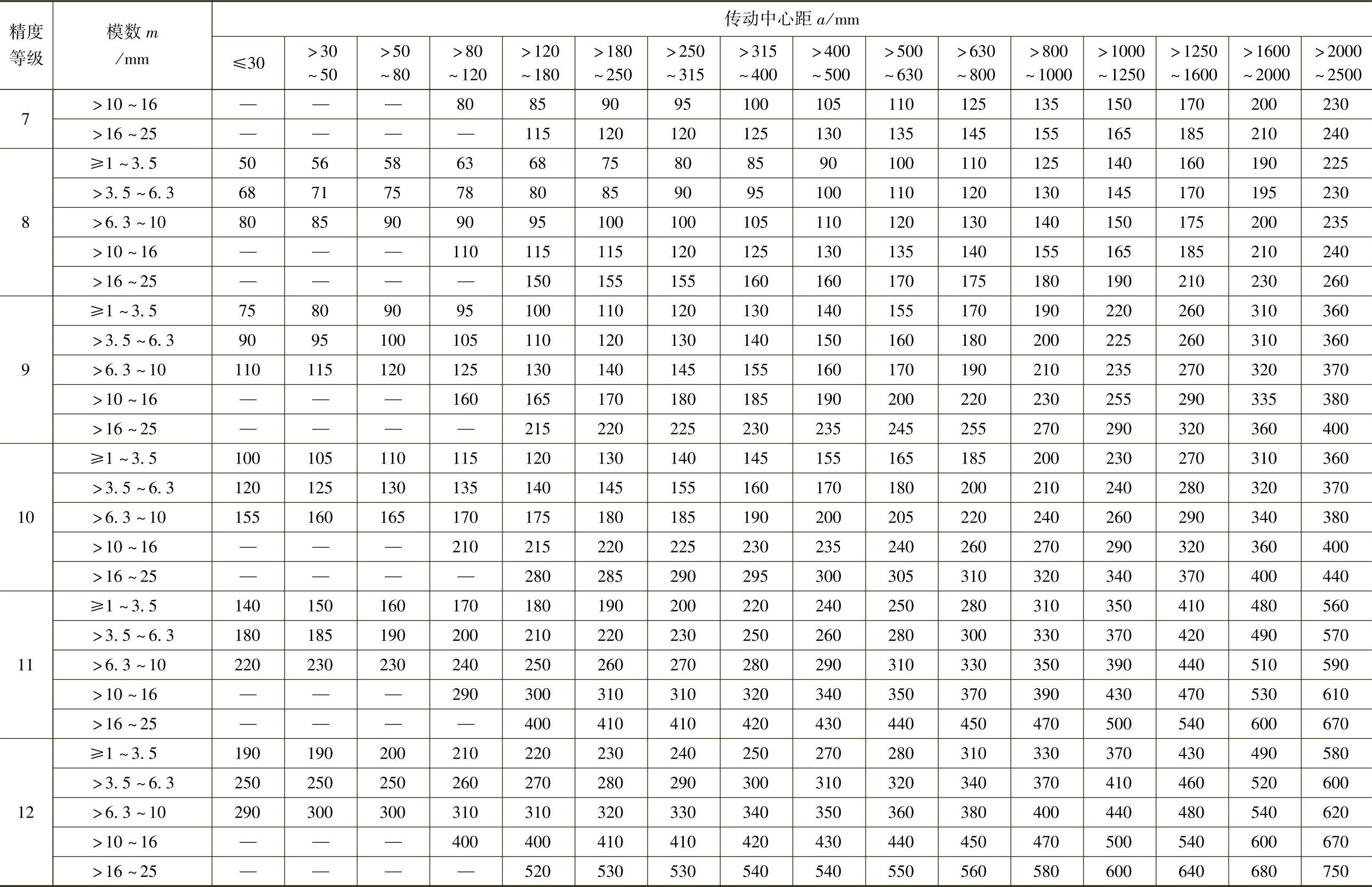
表8-28 蜗杆齿厚公差Ts1值(摘自GB/T 10089—1988) (μm)
 (https://www.xing528.com)
(https://www.xing528.com)
注:1.精度等级按蜗杆第Ⅱ公差组确定。
2.对传动最大法向侧隙jnmax无要求时,允许蜗杆齿厚公差Ts1增大,最大不超过两倍。
表8-29 蜗杆齿厚上偏差(Ess1)中的误差补偿部分EsΔ值(摘自GB/T 10089—1988) (μm)
(续)
注:精度等级按蜗杆的第Ⅱ公差组确定。
表8-30 蜗轮齿厚公差Ts2值(摘自GB/T 10089—1988) (μm)

注:1.精度等级按蜗轮第Ⅱ公差组确定。
2.在最小法向侧隙能保证的条件下,Ts2公差带允许采用对称分布。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。