



由于采用直接转矩控制的双馈发电机起动和低速运行时系统性能较差,在直接转矩控制的基础上,提出了直接功率控制(Direct Power Control,DPC),从而克服了系统性能高度依赖精确的电机参数的缺点,简化了系统设计,提高了系统稳态、暂态性能,是一种有发展前途的控制策略。
1.直接功率控制原理
根据双馈发电机的基本原理可得双馈发电机在固定转速n下,在转子定向坐标系d-q下的等效电路如图8-32所示。
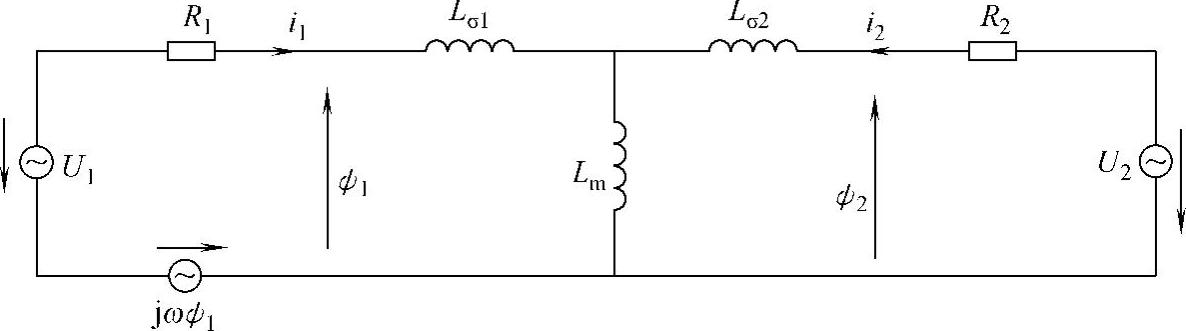
图8-32 转子定向坐标系d-q下的等效电路图
定子磁链和转子磁链在静止和旋转坐标系下的矢量图如图8-33所示,在图8-32和图8-33中,ψ1,ψ2为定、转子磁链;i1,i2为定、转子电流;U1、U2为定、转子电压;Lm,Lσ1,Lσ2为互感及定、转子漏感;R1、R2为定、转子绕组电阻。
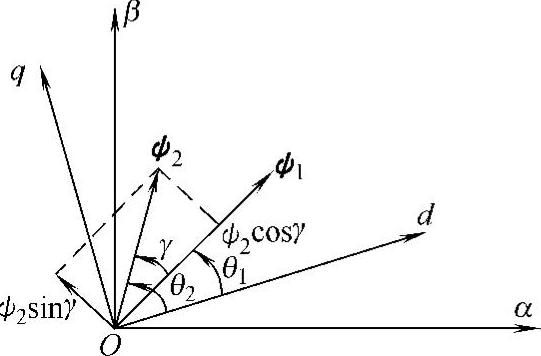
图8-33 定子磁链和转子磁链在静止和旋转坐标系下的矢量图
在以转子ω为参考的两相同步旋转坐标系下,可以推导出定子侧的有功功率输入和无功功率输出的表达式为

式中 L1,L2——分别为定、转子绕组等效自感。
γ=θ2-θ1——转子磁链和定子磁链矢量的夹角等效,如图8-33所示。
对式(8-50)求导可得
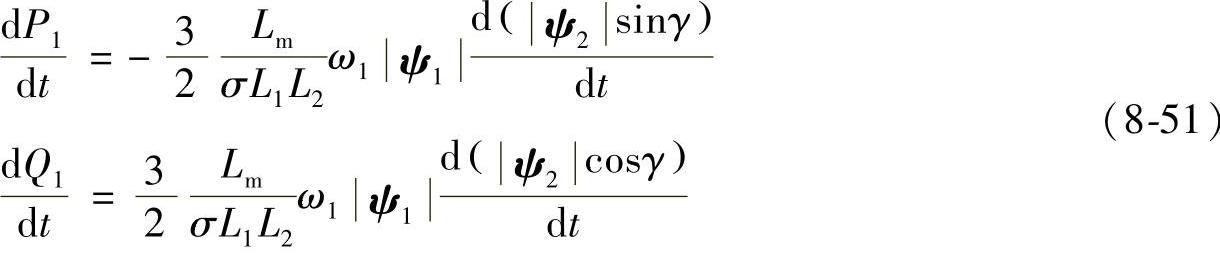
从式(8-51)可以看到 为恒定的参数,变量为ψ2sinγ和
为恒定的参数,变量为ψ2sinγ和 ,所以通过分别调节
,所以通过分别调节 和
和 就可以达到分别控制有功功率和无功功率的目的,这说明定子有功功率和无功功率的控制可以转化到对转子磁链的控制。
就可以达到分别控制有功功率和无功功率的目的,这说明定子有功功率和无功功率的控制可以转化到对转子磁链的控制。
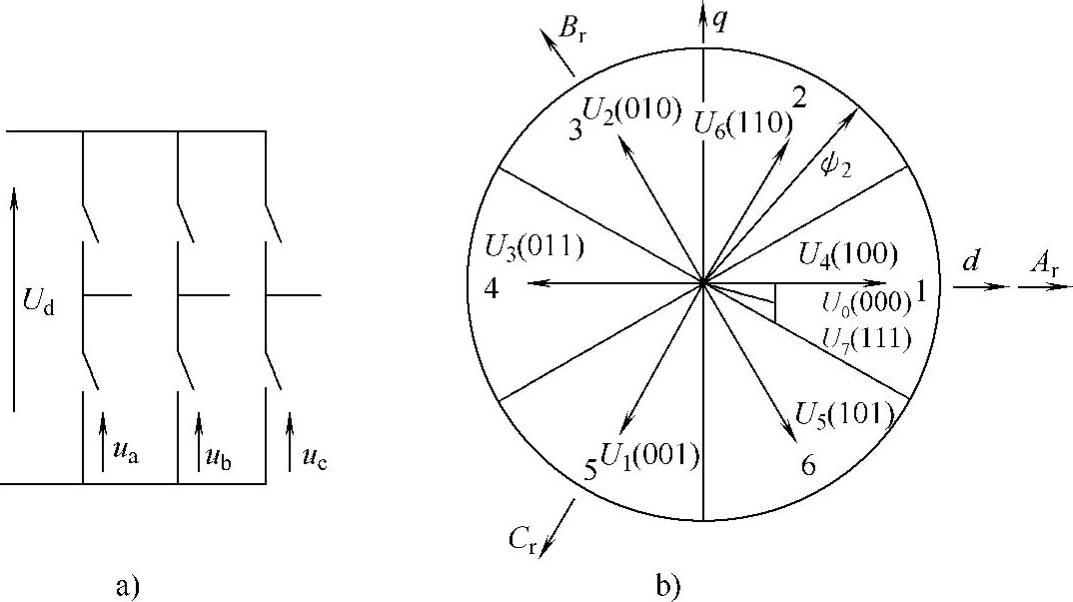
图8-34 两电平变换器和开关电压矢量图
a)两电平变换器 b)开关电压矢量图
图8-34为两电平变换器和开关电压矢量图。由图8-34a可知,三相桥的每一个桥臂输出的相电压ua、ub、和uc都有两个值,分别为0和+Ud,这样开关电压矢量Un(abc)共有八种组合,分别为:U0(000)、U1(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)和U7(111),其中“0”表示上桥臂关断下桥臂开通,“1”表示上桥臂开通下桥臂关断,且U0(000)和U7(111)是零矢量,其余为非零矢量。
忽略转子电阻,转子磁链的微分在旋转坐标系下表达为

由上式可见转子磁链的变化可以归为转子电压的变化:转子磁链按照转子电压矢量的方向移动,速度和电压矢量的幅值成正比例。因此,通过选择适当的开关矢量就可以控制转子磁链的运动方向,如图8-34b所示,电压矢量的选取与转子磁链所属扇区有关。
2.直接功率控制系统
(1)电压矢量对有功、无功功率的影响。由上分析,非零矢量的作用是让转子磁链沿着它的方向移动运行,零矢量的作用使转子磁链停留在原地,等待下一个非零矢量的到来。综合式(8-51)和式(8-52),可以得到在以转子同步速的两相旋转坐标系下的表达式

上式显示了非零电压矢量对有功功率和无功功率的作用效果在电机运行于超同步速和亚同步速时是完全不同的。在超同步速时(ω1-ω2)<0,零电压矢量减少有功输入和无功输出,在亚同步速时的作用效果相反。
由以上分析可知,电压矢量能使转子磁链向靠近给定电压矢量的方向移动。只要已知转子磁链的位置,就可以求出每个电压矢量对转子磁链的调节作用。进一步可以得到这些电压矢量对变量 和
和 的调节作用,这样有功功率和无功功率的控制就转化为对这八个电压矢量的调节。
的调节作用,这样有功功率和无功功率的控制就转化为对这八个电压矢量的调节。
其中ψ2可以由式(8-52)来计算,但是当转速较低时转子电压较小,这样转子电阻造成的压降不可忽略,正是由于ψ2求解的精度问题,可以用较为恒定的定子磁链进行替代,按下式来进行替换(https://www.xing528.com)

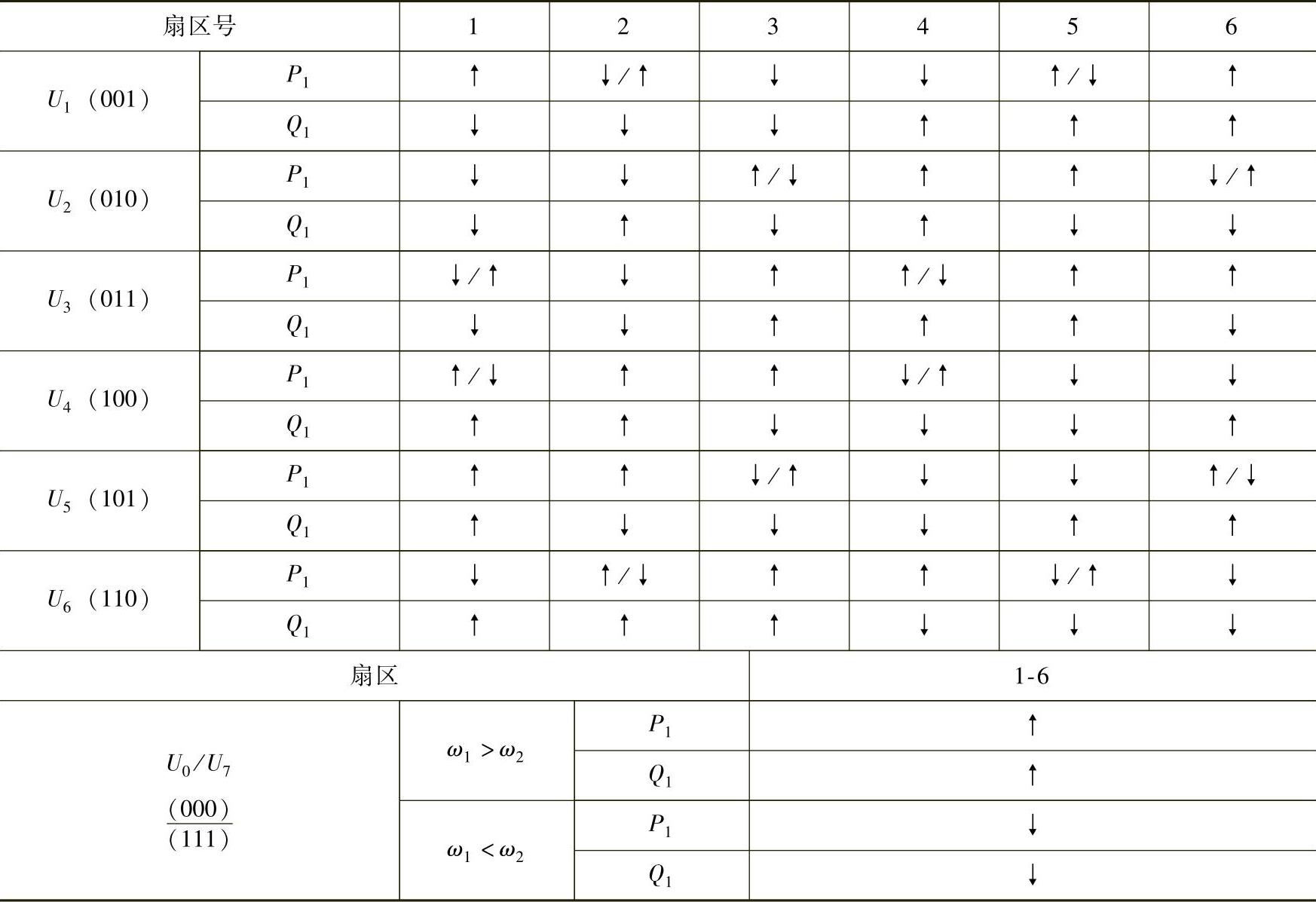
依照定子磁链位置,八个开关电压矢量对有功功率和无功功率的作用效果列表8-2。
表8-2 开关电压矢量对功率作用效果表(↑增加;↓减小)
(2)直接有功、无功功率控制。通过合适的选择开关电压矢量,就可以对有功功率和无功功率进行高效的动态控制,这就是直接功率控制的基本原理。选择方法如下:首先将有功功率和无功功率与其给定值进行比较,由两电平的滞环比较器根据误差来产生有功功率、无功功率的状态量Sp、Sq,其中Sp、Sq是通过一个容差为100的滞环比较器获得,滞环比较器原理如图8-35所示。当P1∗-P1>100时,则Sp=1,表示当前的输出有功功率实际值偏小,要达到有功功率的给定值,必须选择一个电压矢量使磁链增加。以扇区2为例,可以选择U4、U5使有功功率增加,其他扇区可以类推。
当P1∗-P1<-100时,则Sp=-1,表示当前的输出有功功率实际值偏大,要达到有功功率给定值,必须选择一个电压矢量使有功功率减小。以扇区2为例,就可以选择U2、U3使磁链减小,其他扇区类推。
当 时,则Sp保持不变。无功功率的控制与此相似。
时,则Sp保持不变。无功功率的控制与此相似。
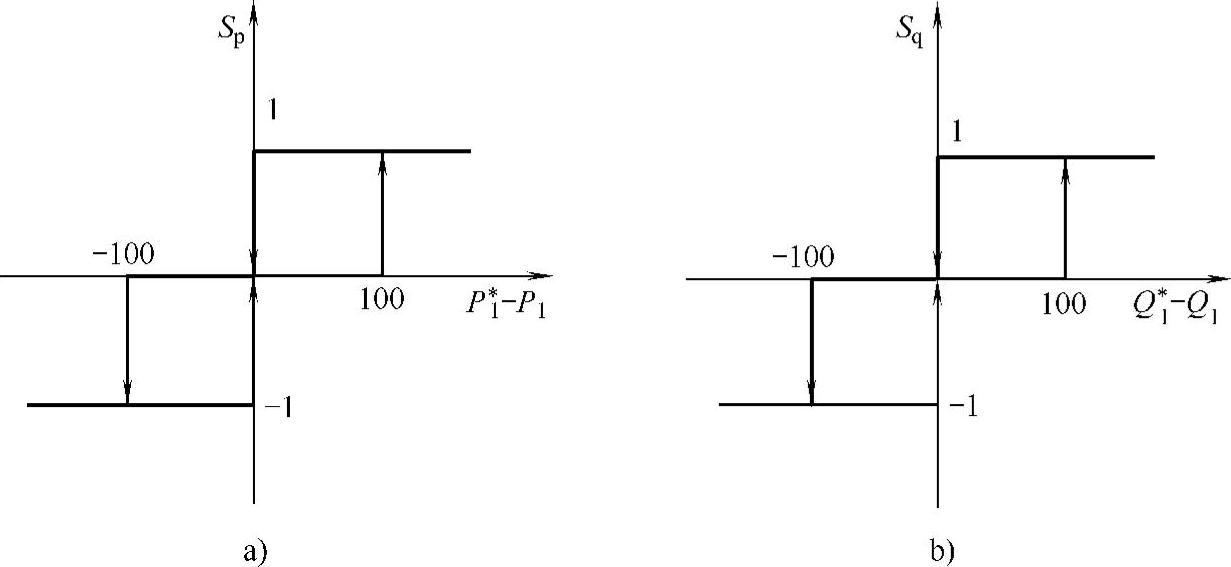
图8-35 滞环比较器原理
a)有功功率滞环比较器 b)无功功率滞环比较器
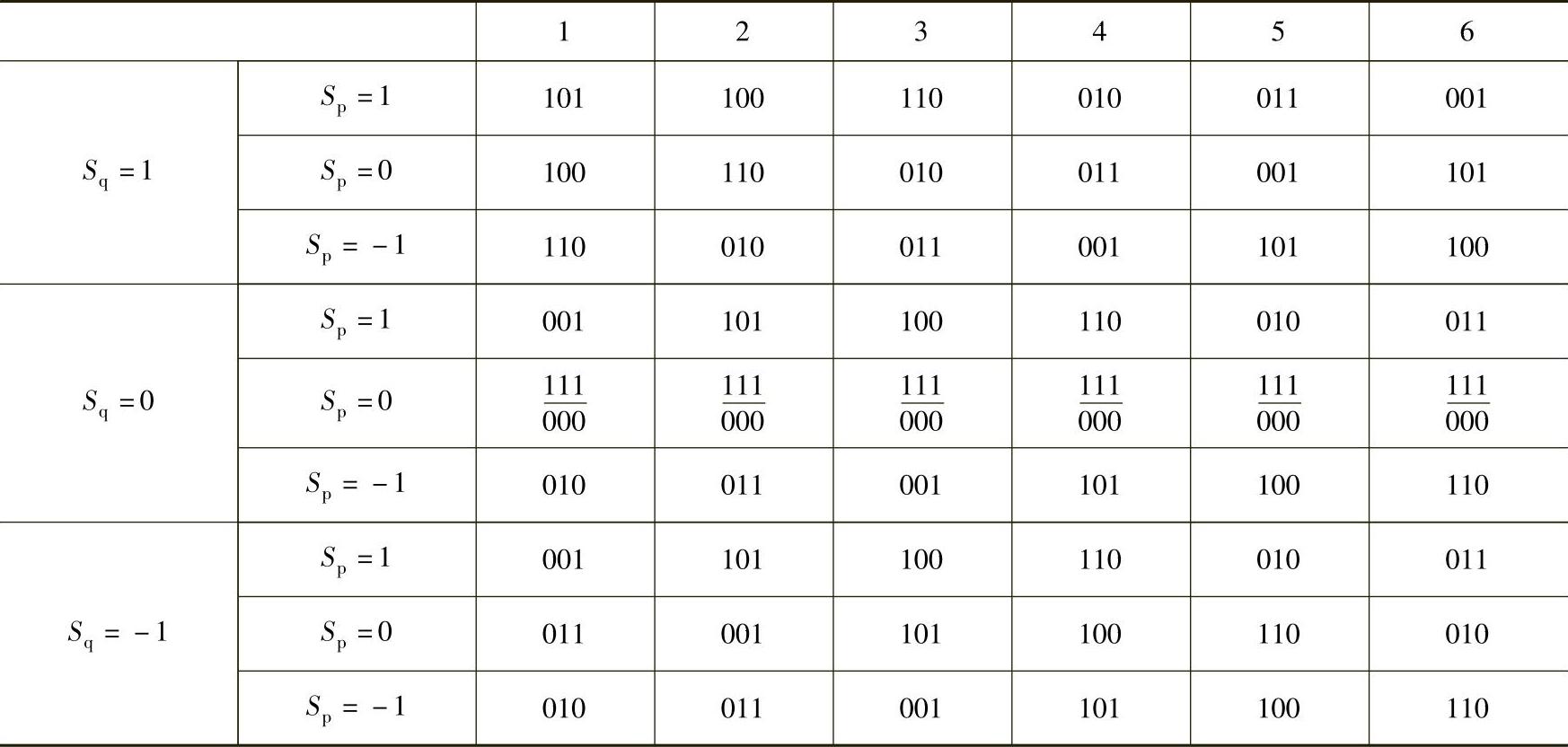
由于最佳开关表的生成不仅考虑非零电压矢量的作用效果,还根据每次开关动作数最小的原则来选择零矢量,使输出无功功率和有功功率能够高效地跟踪给定值。所以,根据有功、无功功率状态量和定子磁链位置,可得表8-3所示的最佳开关表来选择相应的电压矢量。
表8-3 直接功率控制最佳开关表
(3)定子磁链的计算。为了计算旋转坐标系下的定子磁链ψ1,先必须计算在静止坐标系下的定子磁链ψs1的值。在静止坐标系下,定子磁链可以通过下式计算得到

式中,上标s表示静止坐标系。
磁链观测一般采用的模型有三种:u—i模型、i—ω模型和u—ω模型。
u—i模型法是用定子电压与定子电流来确定定子磁链的方法,u—i模型定子磁链可以由式(8-56)表示,其结构如图8-36所示。

此观测模型只用到一个电机参数,即易于测量的定子电阻R1,式中的定子电压u1(t)和定子电流i1(t)同样也是易于确定的物理量,它们能以足够高的精度被检测出来。
因为定子电压谐波含量少和频率固定,所以式(8-55)能够得到较精确的定子磁链。旋转坐标下的定子磁链ψ1可以通过下式计算得到。
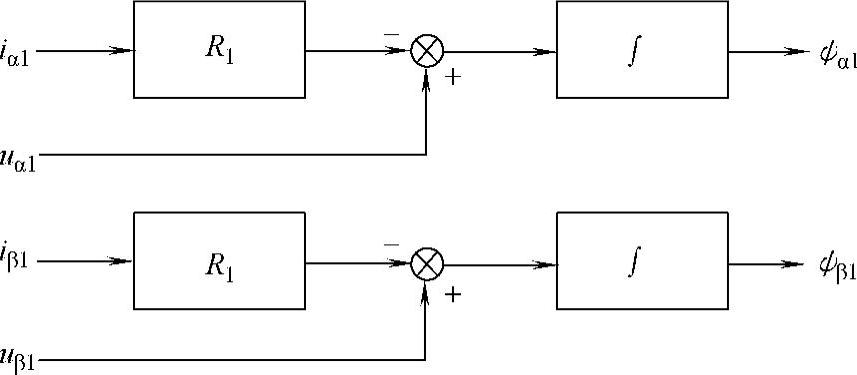
图8-36 定子磁链的u—i模型结构
(4)直接功率控制原理图。综上所述,得到基于最佳开关表直接功率控制的双馈式风力发电系统原理,如图8-37所示。其中,每个采样周期里由有功功率和无功功率滞环控制器输出有功和无功功率的控制量Sp、Sq,再结合定子磁链在扇区的具体位置,根据最佳开关表便可以输出最佳的电压矢量。
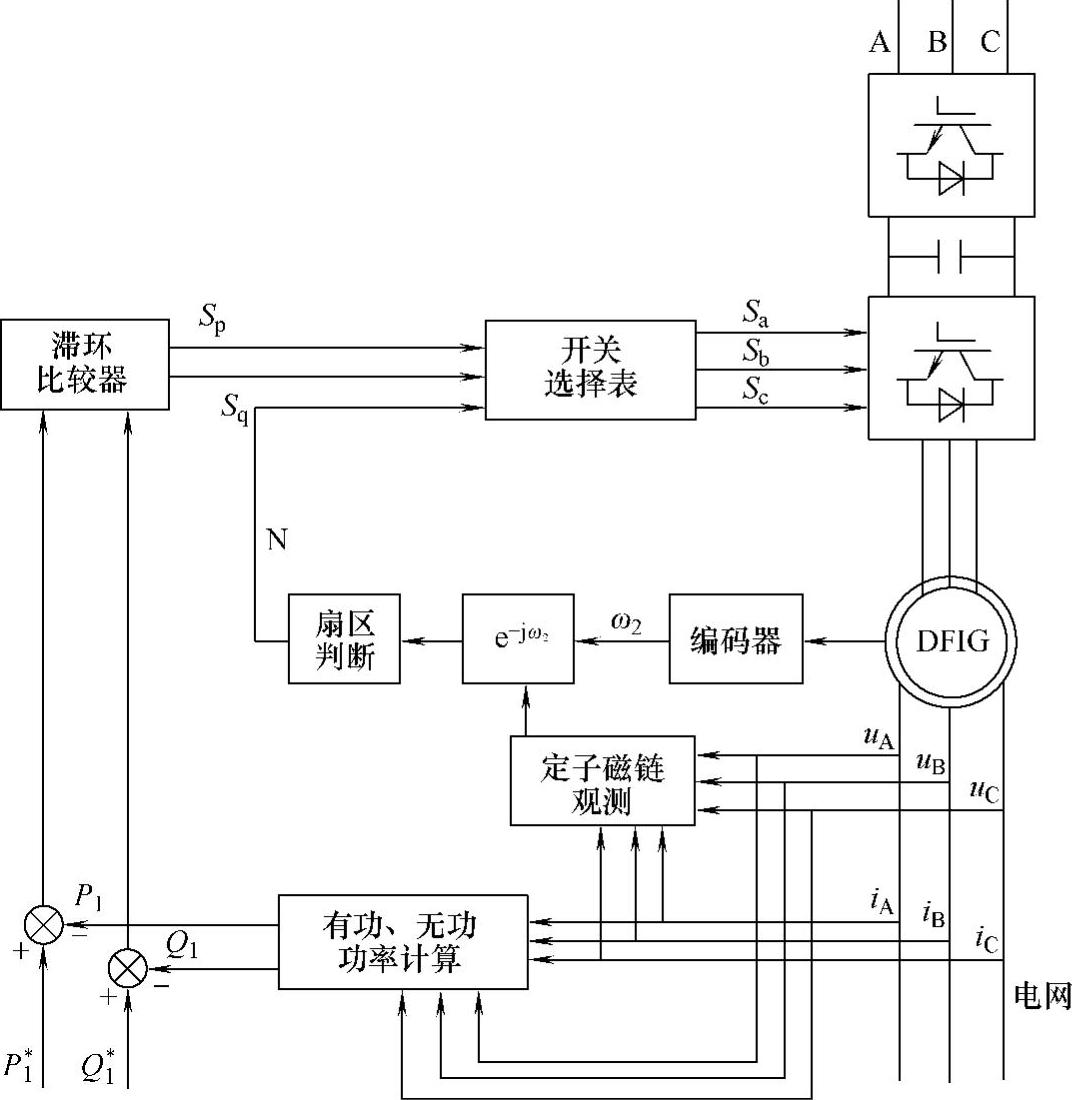
图8-37 直接功率控制原理图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。