



由于传统变桨距系统的响应速度限制,对快速变化的风速,通过改变桨距来控制输出功率的效果并不理想。因此,为了优化功率曲线,改进的变桨距风力发电机组在进行功率控制的过程中,其功率反馈信号不再作为直接控制桨距的变量。变桨距系统由风速低频分量和发电机转速控制,风速的高频分量产生的机械能波动,通过迅速改变发电机的转速来进行平衡,即通过转子电流控制器对发电机转差率进行控制。当风速高于额定风速时,允许发电机转速升高,将瞬变的风能以风轮动能的形式储存起来;转速降低时,再将动能释放出来,使功率曲线达到理想的状态。带转差率控制的变桨距系统框图如图5-9所示。
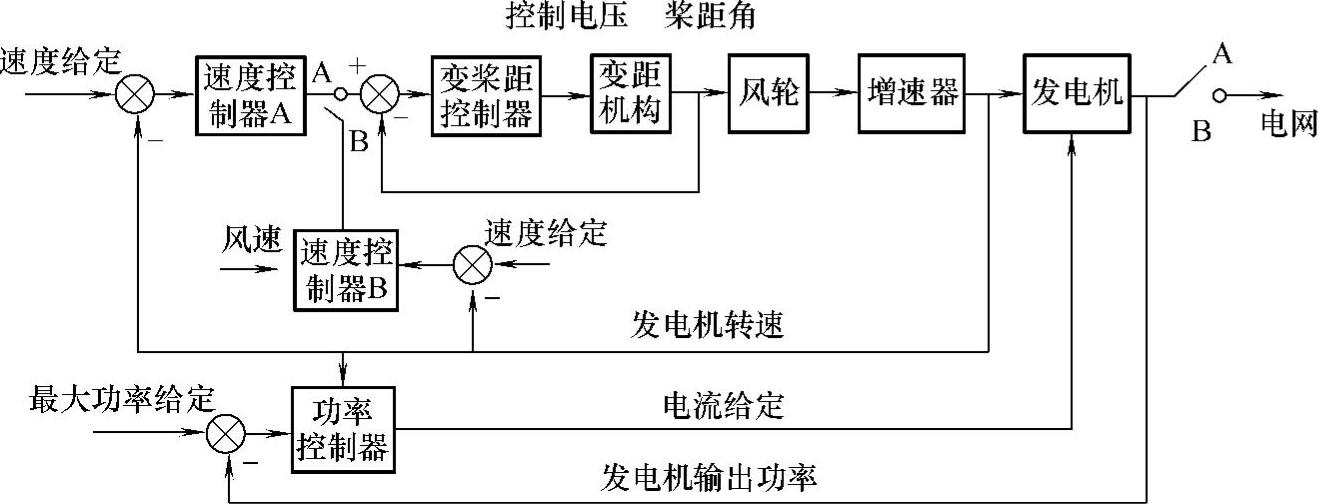
图5-9 带转差率控制的变桨距系统
在发电机并入电网前,发电机转速由速度控制器A根据发电机转速反馈信号与给定信号直接控制;发电机并入电网后,速度控制器B与功率控制器起作用。功率控制器的任务主要是根据发电机转速给出相应的功率曲线,调整发电机转差率,并确定速度控制器B的速度给定。
桨距的给定参考值由控制器根据风力发电机组的运行状态给出。当风力发电机组并入电网前,由速度控制器A给出,当风力发电机组并入电网后由速度控制器B给出。
1.速度控制器A
转速控制系统A在风力发电机组进入待机状态或从待机状态重新起动时投入工作,如图5-10所示。在这些过程中,通过对桨距角的控制,转速以一定的变化率上升,控制器也用于在同步转速(50Hz时1500r/min)时的控制。当发电机转速在同步转速±10r/min(可调)内持续1s(可调),发电机将切入电网。
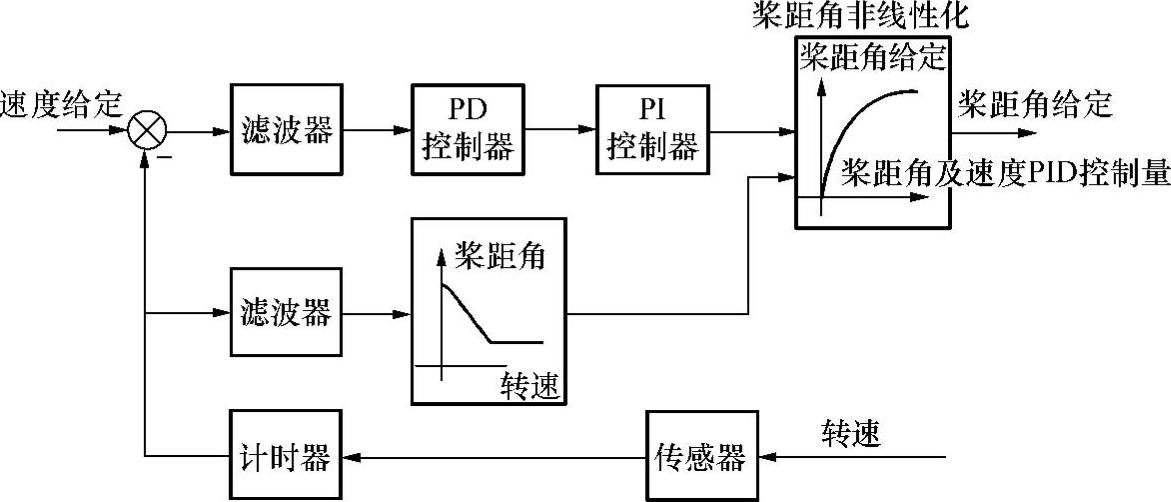
图5-10 速度控制系统A
控制器包含常规的PD和PI控制器,接着是桨距角的非线性化环节,通过非线性化处理,增益随桨距角的增加而减小,以此补偿由于转子空气动力特征产生的非线性,因为当功率不变时,转矩对桨距角的比是随桨距角的增加而增加的。当风力发电机组从待机状态进入运行状态时,变桨距系统先将桨距角快速地转到45°,风轮在空转状态进入同步转速。当转速从0增加到500r/min(可调)时,桨距角给定值从45°线性地减小到5°。这一过程不仅使转子具有高起动力矩,而且在风速快速地增大时能够快速起动。
发电机转速通过主轴上的感应传感器测量,每个周期信号被送到微处理器作进一步处理,以产生新的控制信号。
2.速度控制系统B
发电机切入电网以后,速度控制系统B作用。如图5-11所示,速度控制系统B同时以发电机转速和风速为输入。在达到额定值前,速度给定值随功率给定值按比例增加。额定的速度给定值是1560r/min,相应的发电机转差率是4%(可调)。如果风速和功率输出一直低于额定值,发电机转差率将降低到2%(可调),桨距控制将根据风速调整到最佳状态,以优化叶尖速比。
如果风速高于额定值,发电机转速通过改变桨距角来跟踪相应的速度给定值。功率输出将稳定地保持在额定值上。从图5-11中可以看到,在风速信号输入端设有低通滤波器,桨距控制对瞬变风速并不响应。
与速度控制器A的结构相比,速度控制器B增加了速度非线性化环节。这一特性增加了小转差率时的增益,以便控制桨距角加速趋于0°。
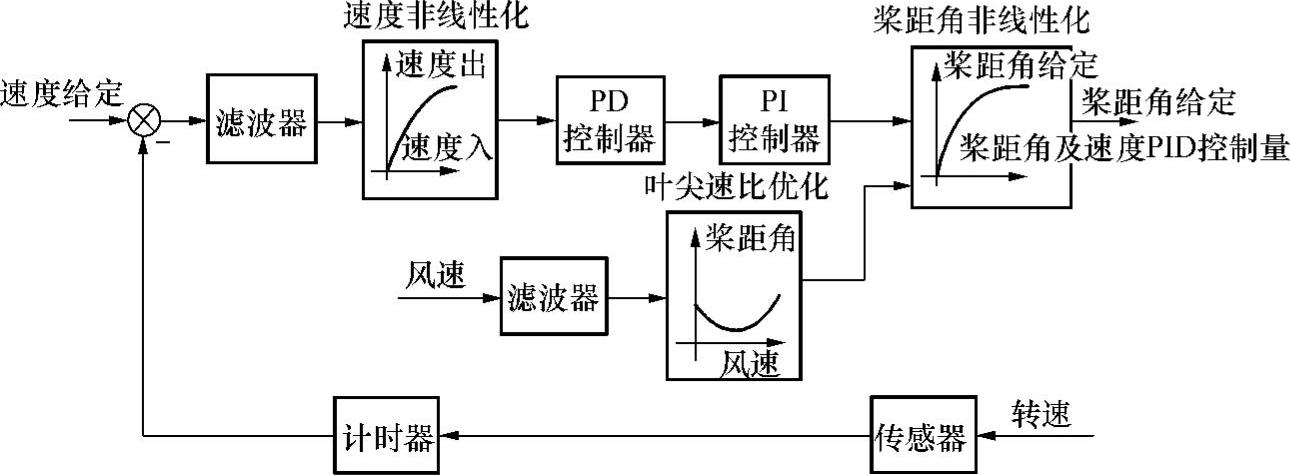
图5-11 速度控制系统B
3.变桨距控制系统
液压变桨距系统的组成如图5-12所示,液压变桨距系统是一个自动控制系统,是由桨距控制器、D/A转换器、液压控制单元、执行机构、位移传感器等组成。(https://www.xing528.com)
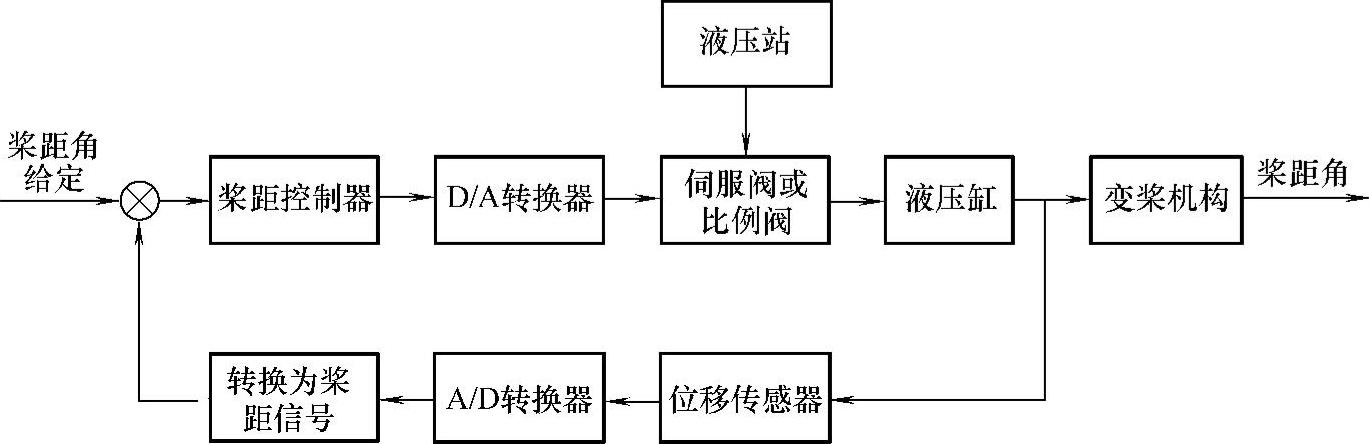
图5-12 液压变桨距系统
桨距控制器是一个非线性比例控制器,一般由软件实现。变桨距控制系统的执行机构是液压系统,桨距控制器的输出信号经D/A转换后变成电压信号控制比例阀(或电液伺服阀),驱动液压缸活塞,推动变桨距机构,使桨距角变化。活塞位移的反馈信号由位移传感器测量,经转换后输入比较器。
4.应用RCC的功率控制系统
功率控制系统如图5-13所示,它是由两个控制环(即外环和内环)组成。外环通过测量转速产生功率参考曲线。发电机的功率参考曲线如图5-14所示,参考功率以额定功率百分比的形式给出,在点画线限制的范围内,功率给定曲线是可变的。内环是一个功率伺服环,它通过转子电流控制器(RCC)对发电机转差率进行控制,使发电机功率跟踪功率给定值。如果功率低于额定功率值,这一控制环将通过改变转差率,进而改变桨距角,使风轮获得最大功率。如果功率参考值是恒定的,电流参考值也是恒定的。
当风速低于额定风速时,发电机转子转差率低于2%,从图5-14的额定2%转差特性可以确定功率基准值。功率控制器使得发电机转子转差率在额定转差特性2%附近某给定范围内变化,从而平滑有功功率输出。在这种运行模式下,变转差发电机的效率将和额定转差2%的常规感应发电机相同。
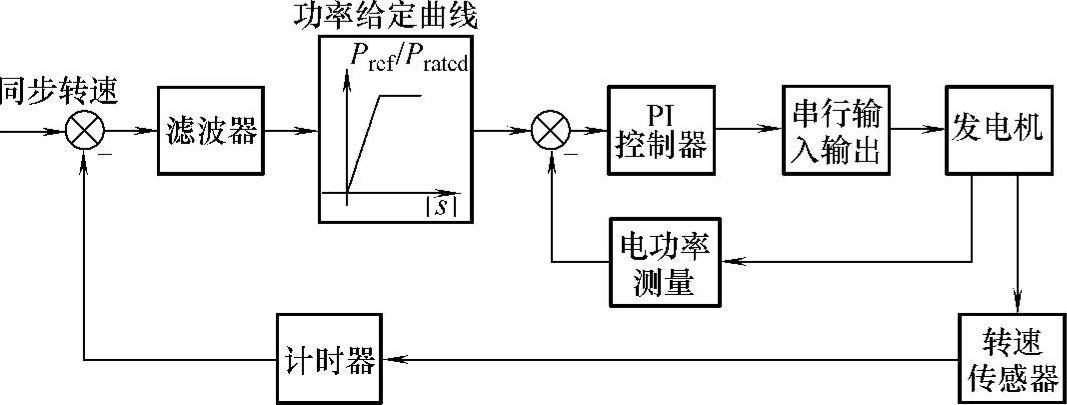
图5-13 功率控制系统
当风速超过额定风速时,发电机转子转差将高于2%,功率基准值将维持在额定功率水平不变。风速的动态变化将引起转速变化,而转子电流快速控制器把转子电流和有功功率维持在额定值。这就意味着输入轴转矩基本恒定,从而减少了齿轮箱上的负载峰值。在这种运行方式下,转速控制器将通过调节桨矩角来控制转子转速,从而使发电机转子的平均转差在4%~5%之间。
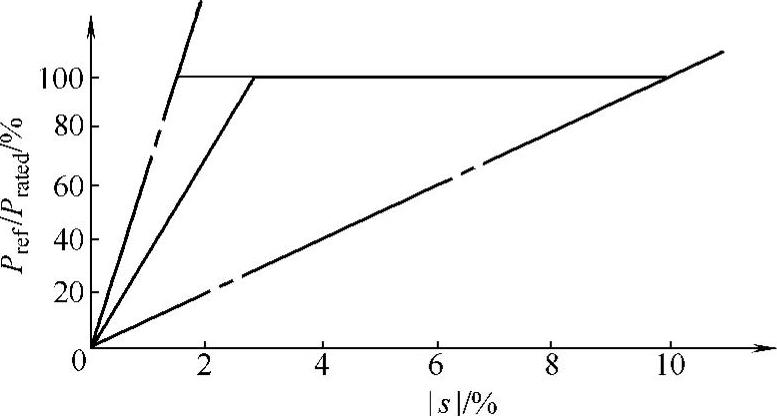
图5-14 功率给定曲线
5.采用转子电流控制器的功率调节
并网后,控制系统切换至状态B,如图5-11所示,由于发电机内安装了RCC控制器,发电机转差率可在一定范围内调整,发电机转速可变。因此,在状态B中增加了转速控制环节。当风速低于额定风速,转速控制环节B根据转速给定值(高出同步转速3%~4%)和风速,给出一个桨距角,此时发电机输出功率小于最大功率给定值,功率控制环节根据功率反馈值,给出转子电流最大值,转子电流控制环节将发电机转差率绝对值调至最小,发电机转速高出同步转速1%,与转速给定值存在一定的差值,反馈回速度控制环节B,速度控制环节B根据该差值,调整桨距角参考值,变桨距机构将桨距角保持在零度附近,优化叶尖速比;当风速高于额定风速,发电机输出功率上升到额定功率,当风轮吸收的风能高于发电机输出功率,发电机转速上升,速度控制环节B的输出值变化,反馈信号与参考值比较后又给出新的桨距角参考值,使得叶片攻角发生改变,减少风轮能量吸入,将发电机输出功率保持在额定值上;功率控制环节根据功率反馈值和速度反馈值,改变转子电流给定值,转子电流控制器根据该值,调节发电机转差率,使发电机转速发生变化,以保证发电机输出功率的稳定。
如果风速仅为瞬时上升,由于变桨距机构的动作滞后,发电机转速上升后,叶片攻角尚未变化,风速下降,发电机输出功率下降,功率控制单元将使RCC控制单元减小发电机转差率绝对值,使得发电机转速下降,在发电机转速上升或下降的过程中,转子的电流保持不变,发电机输出的功率也保持不变;如果风速持续增加,发电机转速持续上升,转速控制器B将使变桨距机构动作,改变叶片攻角,使得发电机在额定功率状态下运行。风速下降时,原理与风速上升时相同,但动作方向相反。由于转子电流控制器的动作时间在毫秒级以下,变桨距机构的动作时间以秒计,因此在短暂的风速变化时,仅仅依靠转子电流控制器的控制作用就可保持发电机功率的稳定输出,减少对电网的不良影响;同时,也可降低变桨距机构的动作频率,延长变桨距机构的使用寿命。
由于自然界风速处于不断的变化中,较短时间内(如3~4s)的风速变化总是不断地发生,因此变桨距机构也在不断地动作,在转子电流控制器的作用下,其桨距实际变化情况如图5-15所示。
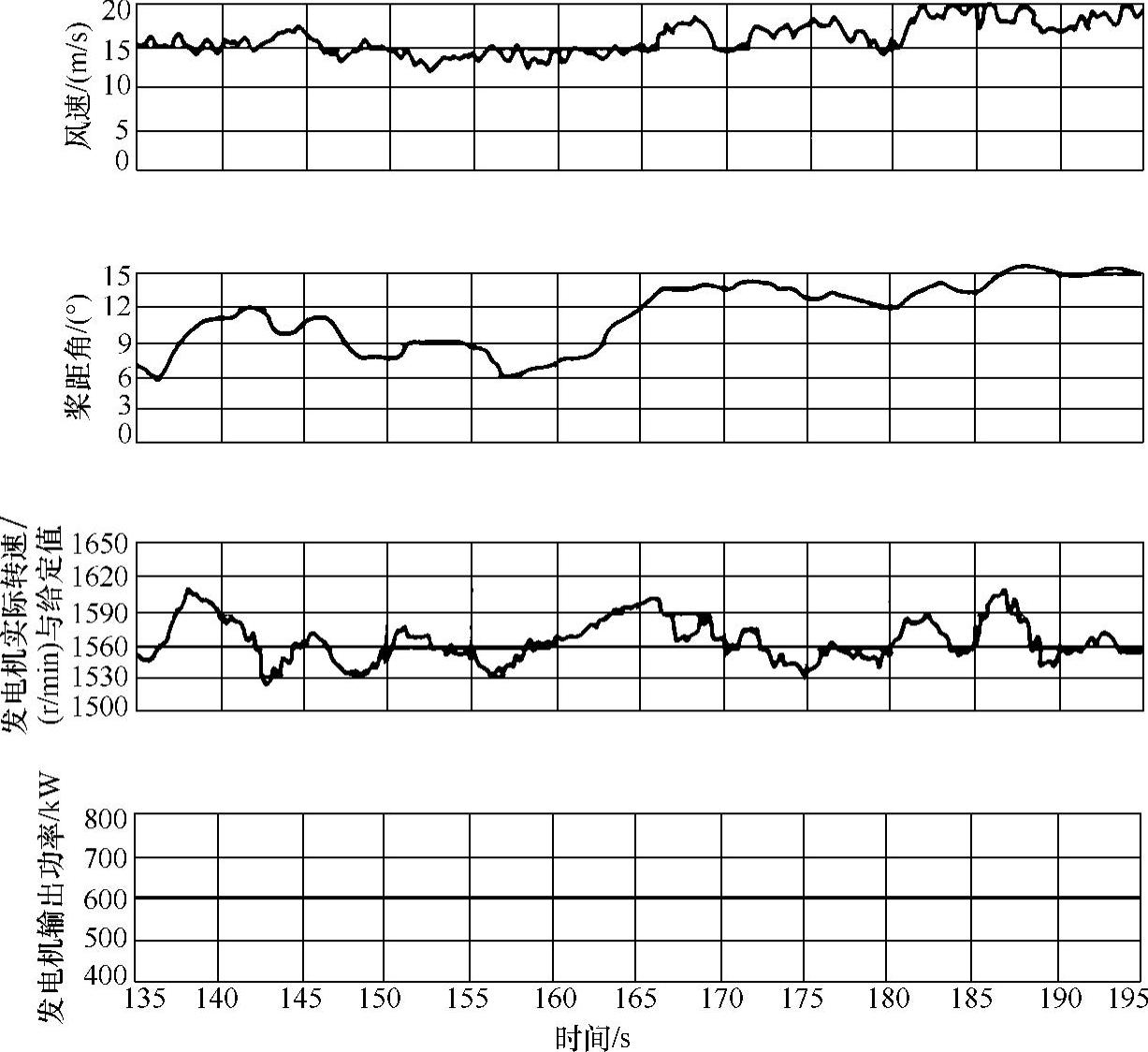
图5-15 额定风速以上运行时桨距角、转速与功率曲线
从图5-15可以看出,RCC控制单元有效地减少了变桨距机构的动作频率及动作幅度,使得发电机的输出功率保持平衡,实现了变桨距风力发电机组在额定风速以上的额定功率输出,有效地减少了风力发电机因风速的变化而造成的对电网的不良影响。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。