



如图6-24所示,海端实时响应服务判定器用于判断服务请求是否属于要求强实时服务响应的请求类型,并且这种请求只需依赖较少的数据量和计算量,但却要求很强的响应实时性。本文所讨论的海云协同模型中,响应这种服务请求的计算任务被定义为海端实时响应任务。
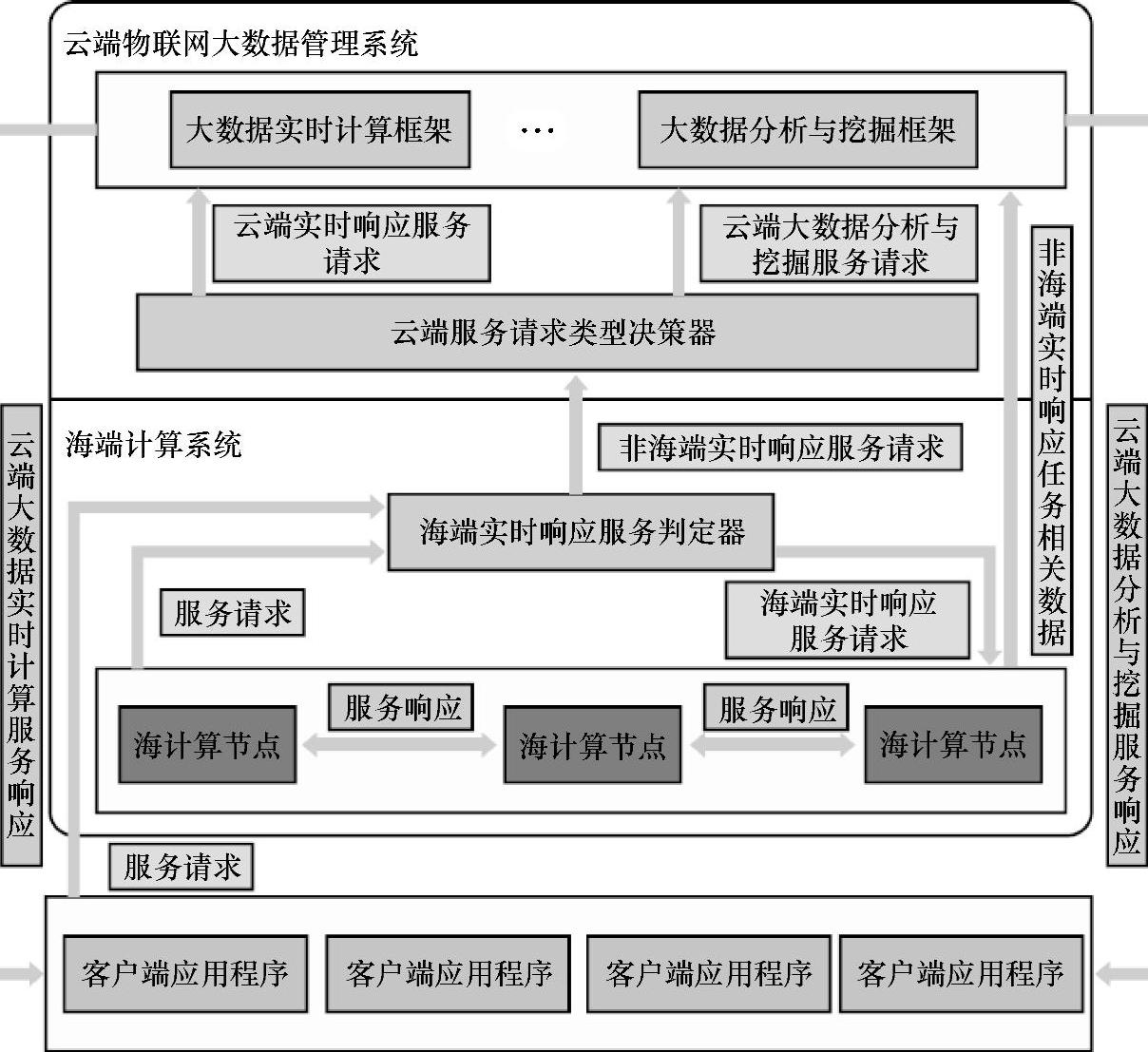
图6-24 海云协同模型整体架构图
例如车联网系统中车辆碰撞预警系统。在车辆碰撞预警系统中,当安装在车辆上的无线传感器感知到有其他车辆进入自身周围的特定范围内并且有可能发生碰撞时,会利用动态自组织网络技术与其他车辆组成一个动态临时网络,并且实时发送一条碰撞预警信息给其他车辆,以避免发生碰撞。碰撞危险解除后,传感器会将此次预警过程中的数据信息发送到云端物联网大数据管理系统,为道路整改或者交通流量控制等方案的设计提供有用的历史参考数据。这些方案的设计,可能需要经过大量的历史数据分析和挖掘以得出较好的方案,因此这种碰撞预警发生的时间、地点、周边交通状况等数据信息将会变得很有价值。(https://www.xing528.com)
自组网请求信息和碰撞预警信息只承载很少的数据量,并且可以在动态局部自组网中快速发送,同时海端实时响应服务判定器也会在这个局部动态自组网中实现,以降低与云端服务器交互而带来的网络负载,从而保证服务响应的高效实时性。如果服务请求属于这种类型,则完成服务响应的计算任务将直接在位于本地的物联网计算节点中执行,并实时给予其他本地计算节点或客户端应用程序以服务响应,这种响应是秒级甚至是毫秒级的。
这里所讨论的海云协同模型中,这种本地物联网计算节点被称为海计算节点,而完成这种服务请求任务的计算过程被称为海计算,在车辆碰撞预警系统中,安装在车辆上的无线传感器就充当了海计算节点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。