



【例4-3-1】以线电流为零为原则的三相电动机断相保护电路
电路如图4-3-1所示。当电动机出现断相故障时,故障相电流为零,因此可以按电流为零的原则来取得断相运行的信号。
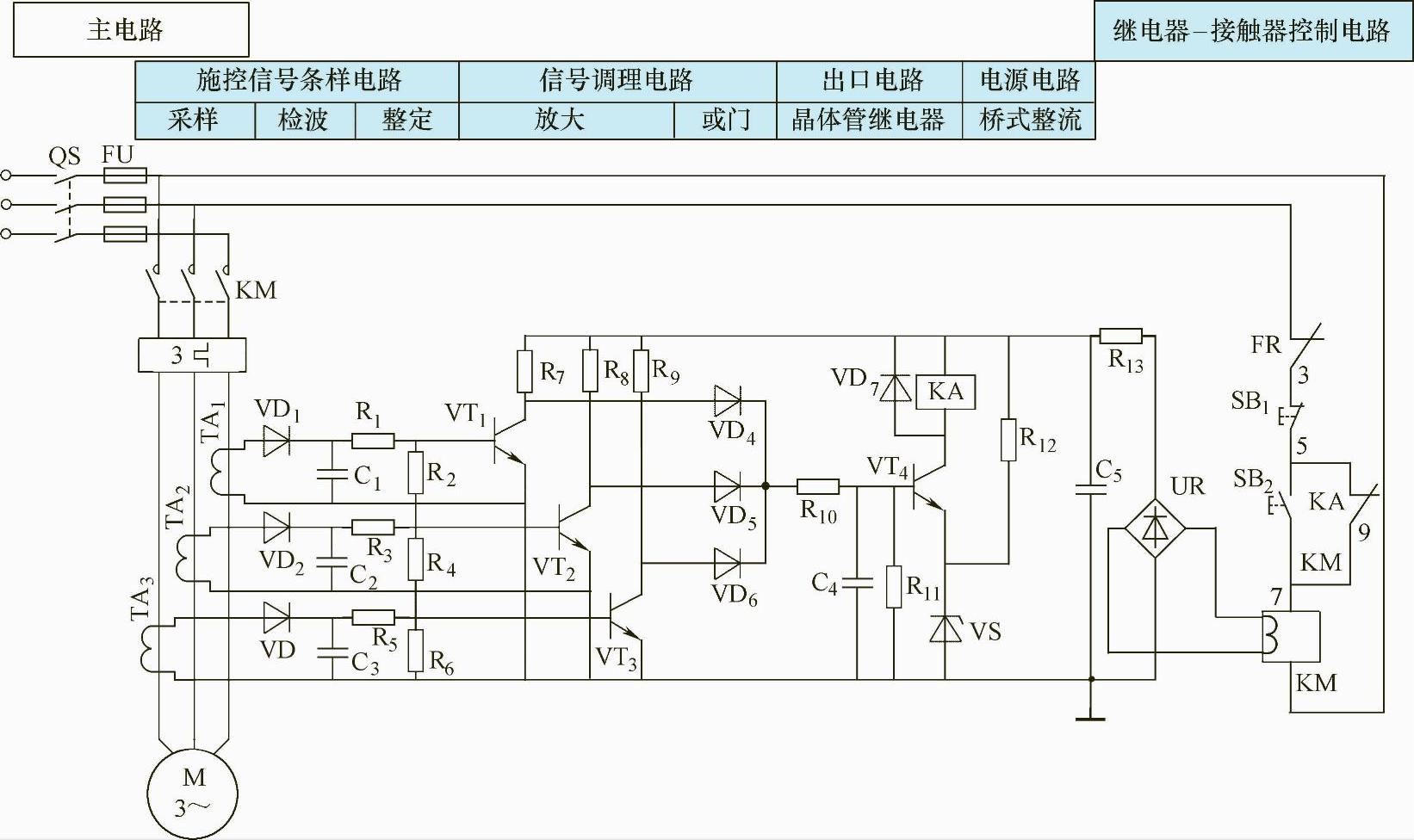
图4-3-1 线电流为零的断相保护电路
1.电路组成
该电路每相均有独立的i-u变换器和检波器,各相信号经电晶体反相器、二极管或门电路送到输出电路。三相中任一相线电流为零时,输出继电器KA均能延时动作。如使3个互感器的磁路均工作在磁饱和段,则该继电器可保护不同容量的电动机。
由于断相信号是取自线电流为零(而不是绕组的相电流),显然,该电路不宜用于三角形联结的电动机保护。
由3个电流互感器检测得到的电流信号,经整流、滤波后输出3个直流电压,分别加在晶体管VT1、VT2和VT3的基极与发射极之间。信号经3只晶体管放大后,接到由二极管VD4、VD5、VD6组成的或门电路。由或门电路控制晶体管VT4的导通或截止,从而控制中间继电器KA的吸合或释放。
利用电容C4的充电过程得到延时,以避免电动机因接触器闭合不同步造成误动作;电阻R12和稳压管VS组成简易稳压电源,为VT4提供射极基准电位,以提高保护电路的可靠性。
接触器KM外加绕的线圈代替降压变压器,其输出电压经整流桥UR整流、RC滤波后,提供给VT1~VT4电源。
2.电路工作过程
合上电源开关QS,按下起动按钮SB2,接触器KM得电吸合并自锁,其主触点闭合,电动机起动运行。3个电流互感器TA1、TA2、TA3二次感应电压经二极管VD1、VD2、VD3整流和电容C1、C2、C3滤波后,再经R1-R2、R3-R4、R5-R6分压,产生的直流电压分别加到晶体管VT1~VT3基极一发射极上,VT1~VT3均导通,VT1~VT3集电极均处于低电位,使由二极管VD7、VD8、VD9组成的或门电路被关闭,晶体管VT4截止,中间继电器KA处于释放状态,其动断触点保持KA(5-9)闭合。
当电源缺一相时,该相电流互感器二次无电压,相应的晶体管截止,使该管的集电极变成高电位,或门电路打开,经一定时间(约几秒)延时(由电容C4、电阻R10组成延时电路),晶体管VT4导通,KA得电吸合,其动断触点KA(5-9)断开,接触器KM失电释放,电动机停转。
【例4-3-2】小型空压机电动机断相保护电路
电路如图4-3-2所示。空压机电动机断相保护电路与一般电动机断相保护电路不同。由于空压机都装有气压自动开关GP,根据压缩空气的压力变化情况,自动断开或闭合电动机电路,达到自动调节压力的目的,并使空压机储气罐内的气体压力保持在正常范围内,使空压机安全运行。因此空压机电动机断相保护电路必须把空压机正常工作的电路无电流与断相造成的无电流区分开来。
1.电路组程
TA1~TA3、VD5~VD7、C3~C5、R1~R3组成电流采样电路;D1~D3组成逻辑电路;VT、KA组成出口电路。
2.数字集成电路CD4073、CD4025、CD4071
CD4025为三3输入或非门,其引脚排列如图4-3-3所示,逻辑表达式为Y
CD4071为四2输入或门,其引脚排列如图4-3-4所示,逻辑表达式为Y=A+B
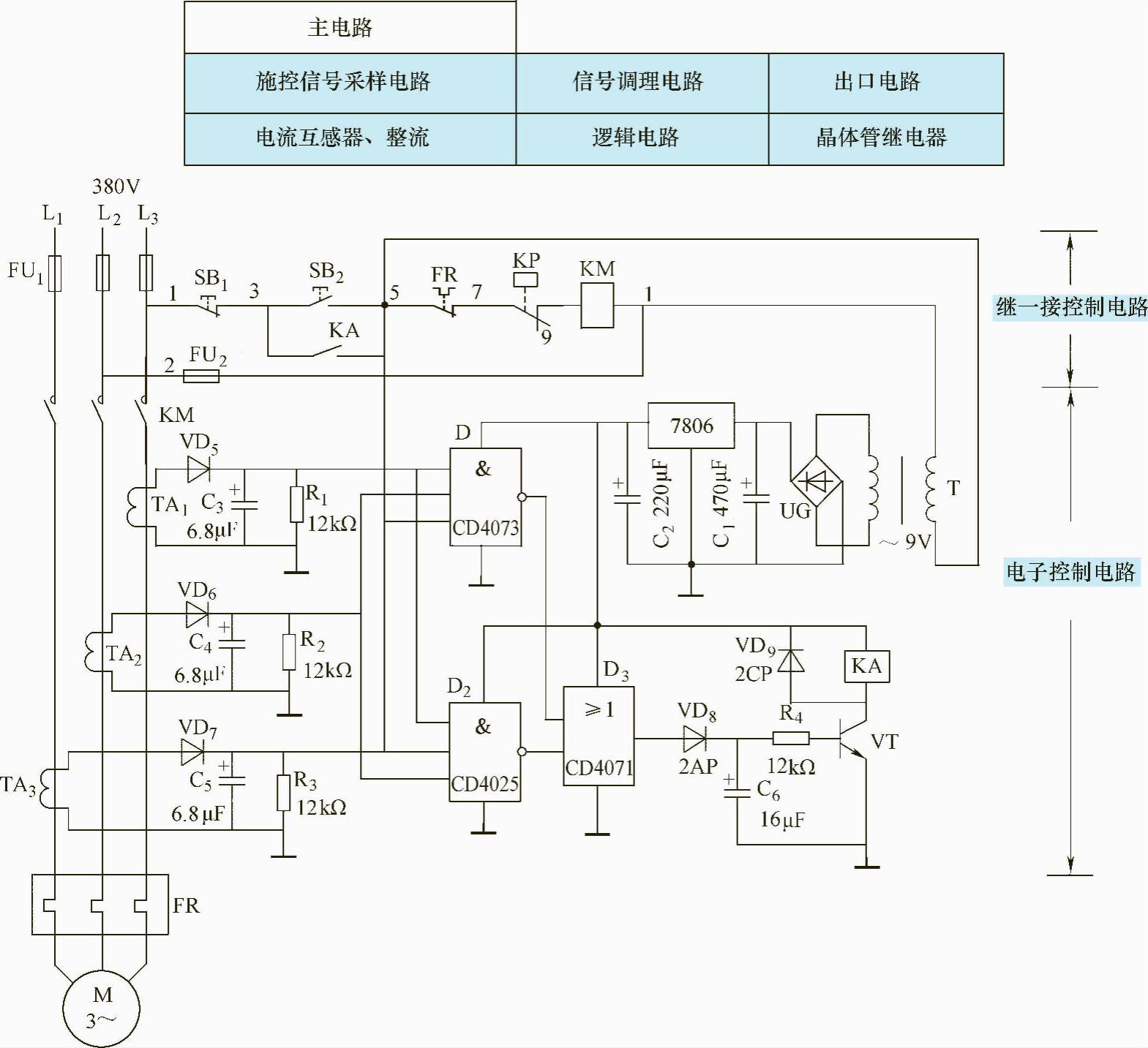
图4-3-2 空压机电动机断相保护电路
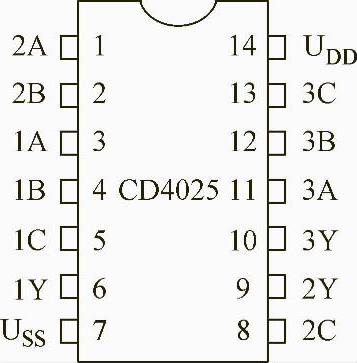
图4-3-3 三3输入或非门CD4025引脚排列(https://www.xing528.com)
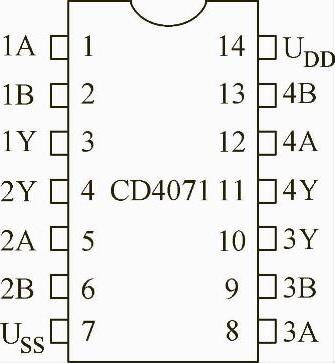
图4-3-4 四2输入或门CD4071脚排列如图6-3-6
CD4073为三3输入与门,其引脚排列如图4-3-5所示,逻辑表达式为Y=ABC
3.电路工作过程
380V交流电经变压器T降压,得到9V交流电压,经UR桥式整流,电容C1滤波,三端稳压集成电路7806稳压,得到6V直流电,提供给集成电路D1、D2、D3及继电器KA作为工作电源。
按下起动按钮SB2,接触器KM得电吸合,其主触点闭合,使空压机电动机开始运转,同时电流互感器TA1、TA2、TA3将电流信号转变为电压信号,经二极管VD5~VD7整流、电容C3~C5滤波后均得到高电位,使与门D1(CD4073)、或非门D2(CD4025)的输入端均为0V高电平,D1的输出端为高电平,D2的输出端为低电平,因此或门D3(CD4071)输出高电-平,使晶体管VT导通,继电器KA得电吸合,其动合触点KA(3-5)闭合,因此在松开SB2后,使得KM仍然保持在吸合状态,空压机正常运转。
随着空压机的运转,储气罐内空气压力不断升高,当压力超过额定工作压力时,压力开关KP的动断触点KP(7-9)断开,使接触器KM失电释放,电动机停止运转。此时TA1~TA3,均无感应电压信号,D1、D2的输入端均变为低电平,D1输出低电平,D2输出高电平,D3输出高电平,VT仍然导通,继电器KA继续处于吸合状态,其动合触点KA(3-5)保持闭和状态,为下一次电动机的运转做准备。当储气罐内空气压力低于工作压力时,KP的动断触点KP(7-9)闭合,使KM得电吸合,电动机又一次起动运转,因此该断相保护电路完全能满足空压机的频繁起动与停止。
单击停止按钮SB1后,KM、KA均失电释放,电动机停止运转。
当发生一相断路时,如L3相断路,则TA1无感应电压,TA2、TA3仍然有感应电压,使D1、D2输出低电平,D3输出低电平,VT截止,继电器KA失电释放,其动合触点KA(3-5)断开,使KM失电释放,电动机停止运转,达到断相保护目的。当L1相或L2相断路时,工作过程相同。
【例4-3-3】555时基电路控制的交流电焊机空载自停电路
交流电焊机空载自停控采用电流控制。电流控制就是在电焊机的二次输出在线安装电流互感器,通过电焊变压器二次电流的“有”与“无”,控制焊机的“开”与“关”,达到空载自停节电的目的。电路如图4-3-6所示。
1.电路组成
电焊变压器T1由接触器KM控制,KM由继电器KA控制,KA由555集成定时器N1控制。N1组成施密特触发器,控制焊接及焊接短时暂停。N1又由VT1、VT2以及电流互感器TA控制,VT1、VT2控制焊接起动过程,而电流互感器TA控制维持焊接过程。N2组成10kHz的脉冲信号发生器。
2.电路工作过程
合上电源开关QS,控制电路的电源变压器T2首先得电,T2二次电压经整流桥UR整流、C1滤波,输出12V直流电压,作为控制电路的工作电源。
1)未焊接。在电源刚接通即初始状态,电容C2上的电压不能突变,为零,即N1的②、⑥脚为低电平,因此N1的③脚输出高电平,中间继电器KA处于释放状态,其动合触点KA(1-2)未闭合,使接触器KM不吸合,电焊变压器T1未得电。与此同时,N2组成的多谐振荡器开始工作,其③脚输出频率约为10kHz的脉冲信号。该信号经R8分成两路,一路通过KA的动断触点KA(3-4)加到T1二次侧的一端B,T1二次侧的另一端A与控制电路的“地”相连,由于T1的二次侧对10kHz信号呈现的感抗很大,因此该回路的电流很小,致
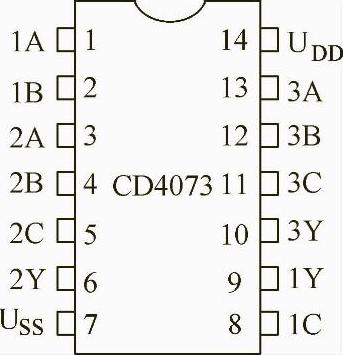
图4-3-5 三3输入与门CD4073引脚排列
使互感器TA的输出电压也极小;另一路经C5耦合,VD4整流、C6滤波后得到的直流电压使VT1导通、VT2截止,使VT2对C5无影响,N1的③脚保持高电平,电焊机处于空载节电状态。
2)焊接。在焊接时,焊条和工件接触,使焊接变压器T1二次侧的B端通过工件和焊条接地,因此通过KA的动断触点KA(3-4),将N2输出的脉冲信号短接,通过电容C5也无信号输出,使VT1失去偏置电压,VT1截止、VT2导通,直流电源电压通过VT2对电容C2充电,N1的②、⑥脚电位升高,当达到N1的翻转电压时,N1的③脚输出低电位,致使KA得电吸合,KA的动断触点KA(3-4)先断开、动合触点KA(1-2)后闭合。动断触点KA(3-4)断开,N2恢复输出10kHz信号,该信号使VT1导通,VT2截止,使直流电源电压通过VT1对电容C2充电过程终止;动合触点KA(1-2)后闭合,使接触器KM得电吸合,其主触点闭合,焊接变压器得电,进行焊接,此时电流互感器TA二次侧的感应电压经VD1整流、通过R1对电容C2充电,使N1的②、⑥脚继续保持高电位,N1的③脚保持输出低电位,KA、KM保持得电吸合。电路中VS的作用是使N1的②、⑥脚电压最大不超过供电电源电压。
3)焊接短暂停止。焊条离开工件,焊接短暂停止,此时电流互感器TA二次侧的无感应电压输出,通过R1对电容C2充电过程终止,C2通过R2放电,使N2的②、⑥脚电位逐渐降低,当降低到N1的翻转电压时,N3的③脚输出高电位,使KA失电释放,KM失电释放,焊接变压器也失电。此时,N2输出的使VT1导通、VT2截止,使VT2对C5无影响。达到焊接短暂停止时节电的目的。
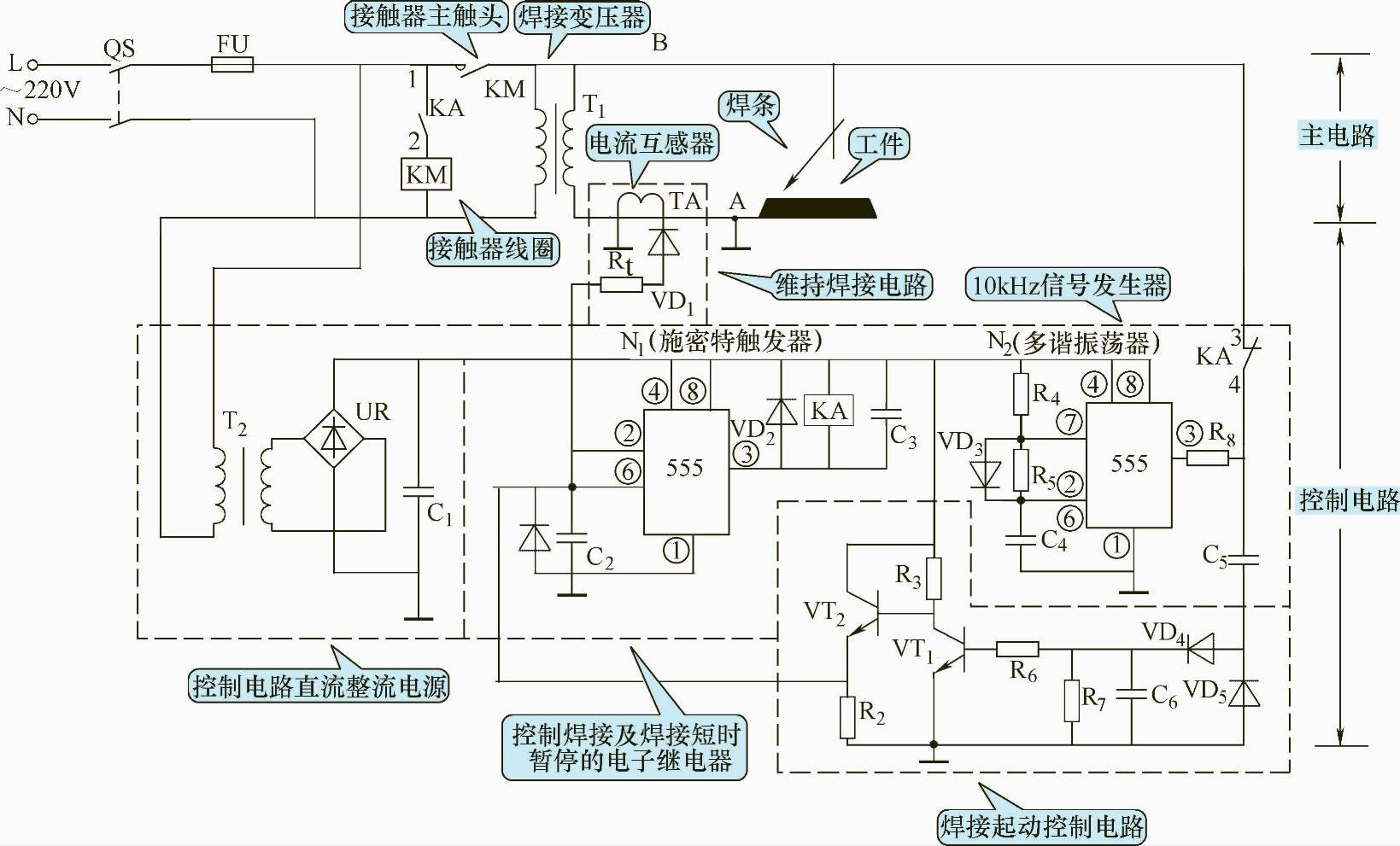
图4-3-6 555时基电路控制的交流电焊机空载自停电路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。