



1.控制要求
设计一个简单的步进电动机正反转PLC控制系统。按下正转起动按钮SB1,步进电动机正转;按下反转起动按钮SB2,步进电动机以相同的转速反转,并转过相同的角度;按下停止按钮SB3,步进电动机停转。
2.操作步骤
1)根据控制要求,进行I/O地址通道分配。
分析控制要求可知,正转起动按钮SB1、反转起动按钮SB2及停止按钮SB3属于控制信号,作为PLC的输入量分配接线端子;驱动器属于被控对象,作为PLC的输出量分配接线端子。对输入量/输出量(I/O)进行地址分配,见表4.12-4。
2)根据控制要求,设计并绘制PLC控制系统电气原理图,如图4.12-8所示。PLC采用晶体管输出型S7-200 CPU226(DC/DC/DC),步进电动机驱动器控制信号电压为DC5V。
表4.12-4 I/O地址通道分配

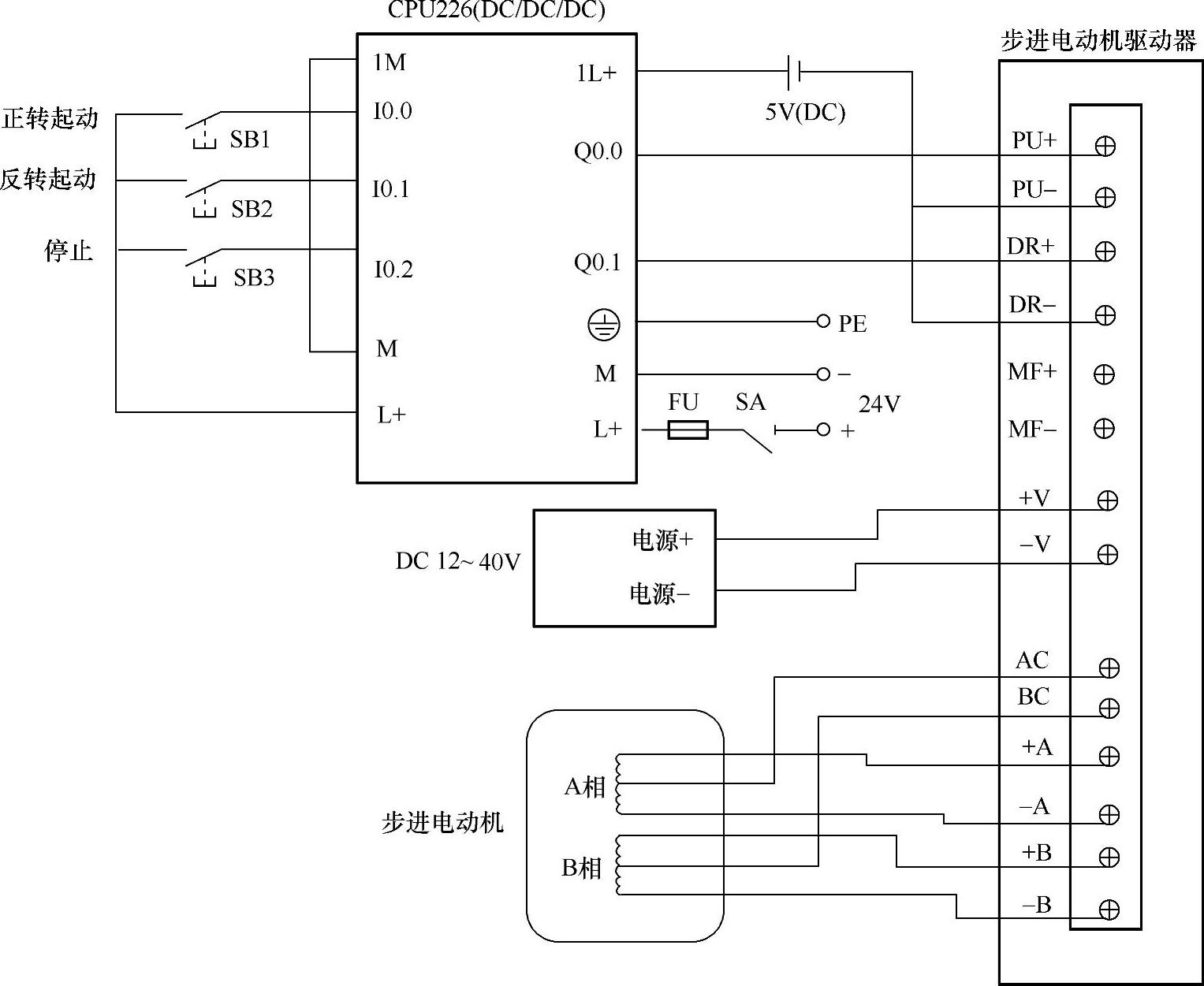
图4.12-8 PLC控制步进系统原理图
①YKA2404MC型驱动器介绍。图4.12-9a所示为YKA2404MC型驱动器。其工作电压为DC 12~40V,额定电流为4.0A,采用单电源供电,适配外径尺寸为42~86mm的各种型号的二相混合式步进电动机。
②YKA2404MC步进电动机驱动器的接线。YKA2404MC步进电动机驱动器的指示灯和接线端子如图4.12-9b所示,驱动器接线图如图4.12-8所示。如把5V直流电源脉冲加至PU+端与PU-端,即把控制器(如PLC或单片机等)输出的脉冲信号送至步进电动机驱动器,步进电动机驱动器就按此脉冲的频率去控制步进电动机的转速。DR+端与DR-端用来控制步进电动机的转动方向,此两端子未加上5V的直流电压,步进电动机转动方向为正转;两端子上加上5V的直流电压,则步进电动机转动方向变为反转。MF用来控制步进电动机制动。
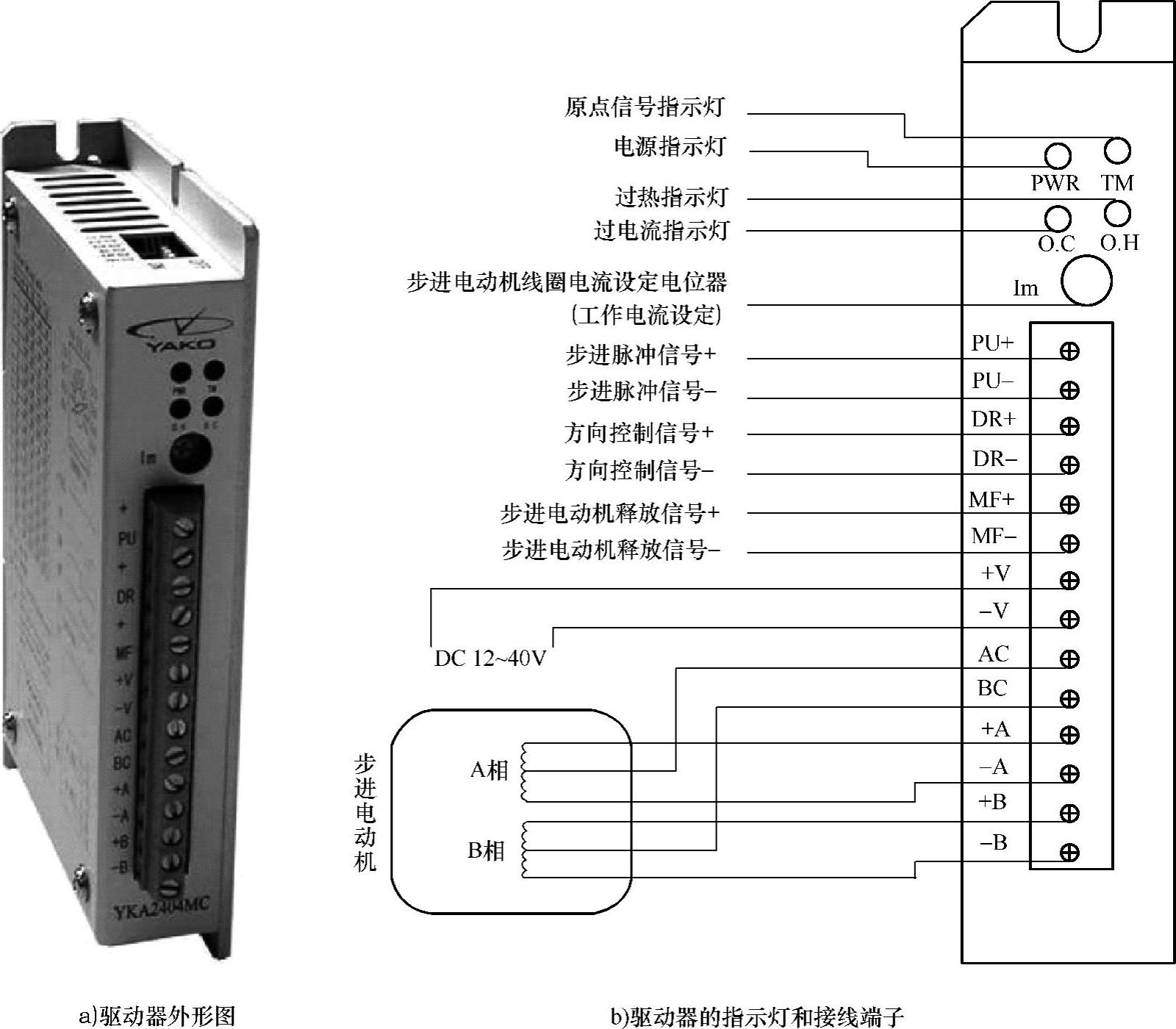
图4.12-9 驱动器介绍
YKA2404MC步进电动机驱动器的细分设定开关D2设置为OFF,即PU-端为步进脉冲信号端,DR-端为方向控制信号端。即驱动器的PU-端和DR-端与电源的负极连接,驱动器的PU+端和DR+端应该分别与PLC的Q0.0和Q0.1连接。这样,+5V的步进脉冲信号由Q0.0端输出通过PU+端输入驱动器,+5V的方向控制信号由Q0.1端输出通过DR+端输入驱动器。
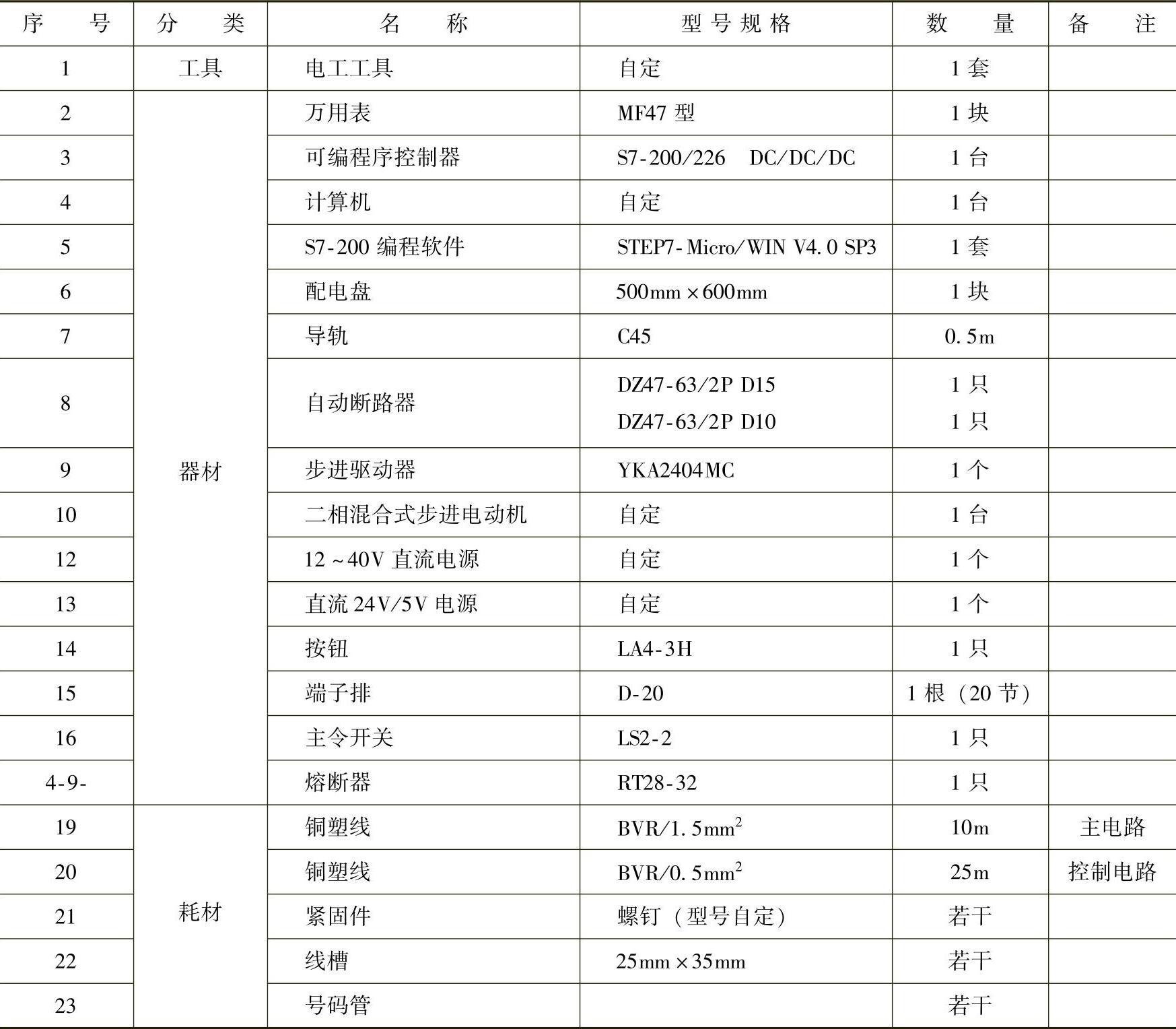
3)材料准备。根据接线原理图,列出需要的所有材料清单,见表4.12-5。
①选择元件时,主要考虑元件的数量、型号及额定参数,驱动器与步进电动机应相互匹配。
②检测元器件的质量好坏。
③PLC的选型要合理,在满足要求下尽量减少I/O的点数,以降低硬件的成本。
4)线路安装与接线。根据控制要求与电路原理图选择安装所需要的材料,并按照工艺要求进行安装与接线。这里重点介绍步进电动机驱动器使用注意事项。
①不要将电源接反,输入电压不要超过DC40V。
②输入控制信号电平为5V,当高于5V时需要接限流电阻。
③YKA2404MC驱动器采用特殊的控制电路,故必须使用6出线或者8出线步进电动机。
表4.12-5 材料清单(https://www.xing528.com)
④驱动器温度超过70℃时停止工作,故障指示灯O.H亮,直到驱动器温度降到50℃,驱动器自动恢复工作。出现过热保护请加装散热器。
⑤过电流(电流过大或电压过小)时故障指示灯O.C亮,请检查步进电动机接线及其他短路故障或是否电压过低。若是步进电动机接线及其他短路故障,排除后需要重新上电恢复。
⑥驱动器通电时绿色指示灯PWR亮。
⑦过零点时,TM指示灯在脉冲输入时亮。
5)PLC程序设计。编写思路:正转运行时Q0.0输出脉冲,Q0.1为OFF;反转运行时Q0.0输出脉冲,Q0.1为ON;停止运行时Q0.0停止输出脉冲,Q0.1为OFF。由于步进电动机正、反转的转速相同,并转过相同的角度,因此步进电动机正转和反转所需要的脉冲串的脉冲周期和脉冲数一样,即步进电动机正、反转所需要的脉冲串的控制参数一样。由于只需要输出两个脉冲串,可以采用单段PTO编程实现控制即可。图4.12-10为采用PLC脉冲输出指令设计的步进电动机正反转PLC控制梯形图。
6)程序录入与调试。
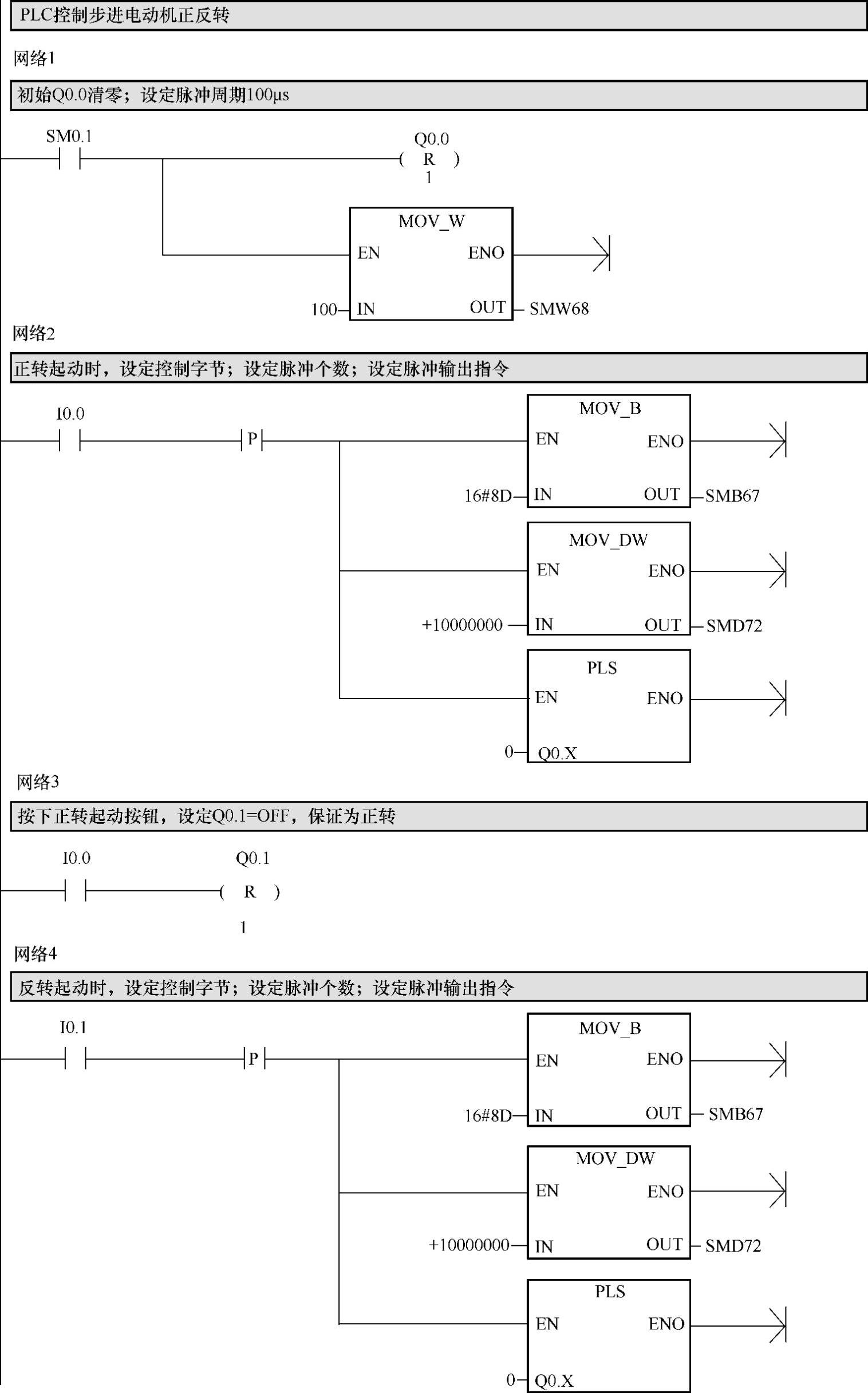
图4.12-10 步进电动机正反转PLC控制梯形图
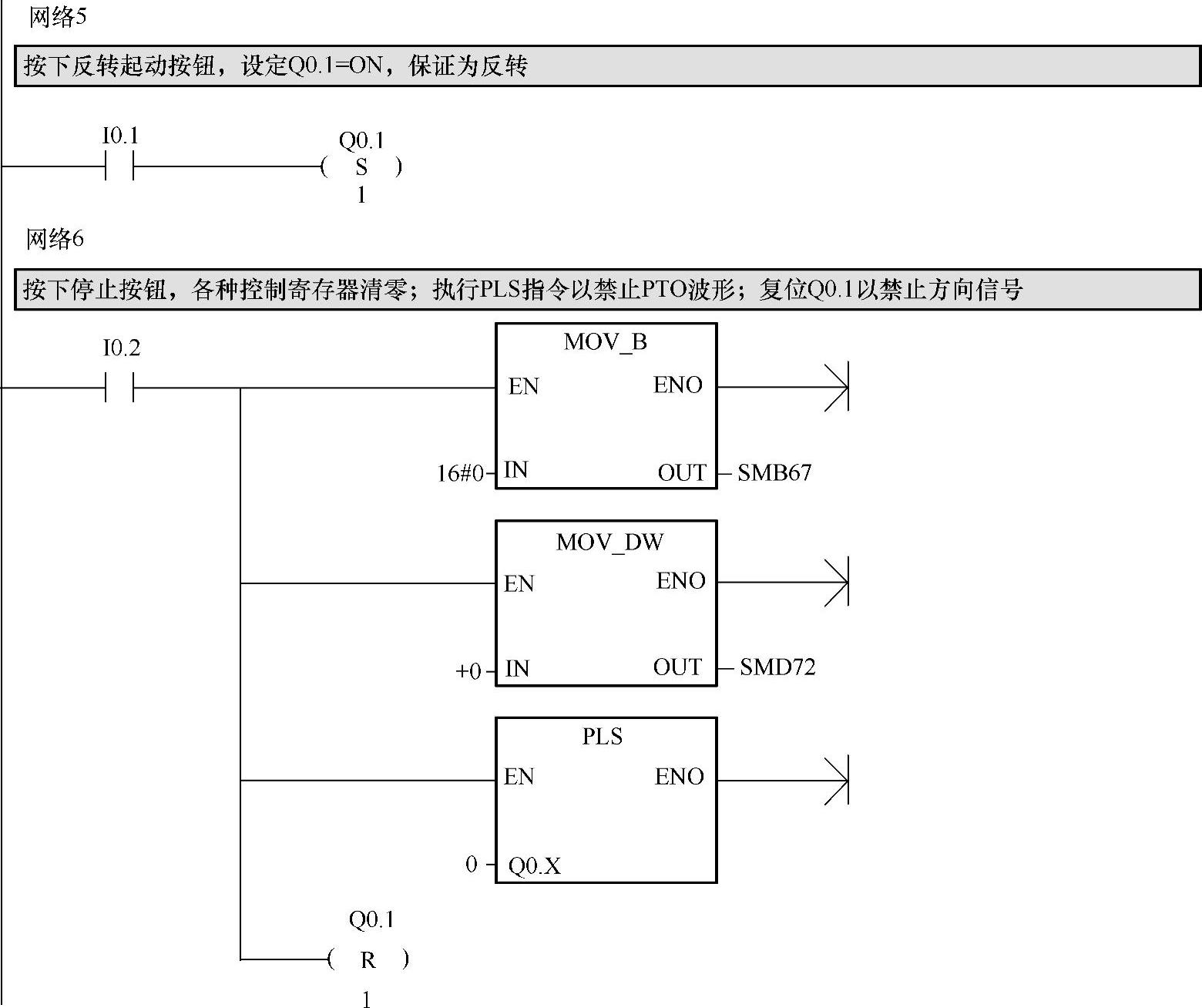
图4.12-10 步进电动机正反转PLC控制梯形图(续)
①建立计算机与PLC通信联系。
②编译、下载程序。
③设置步进驱动器参数。
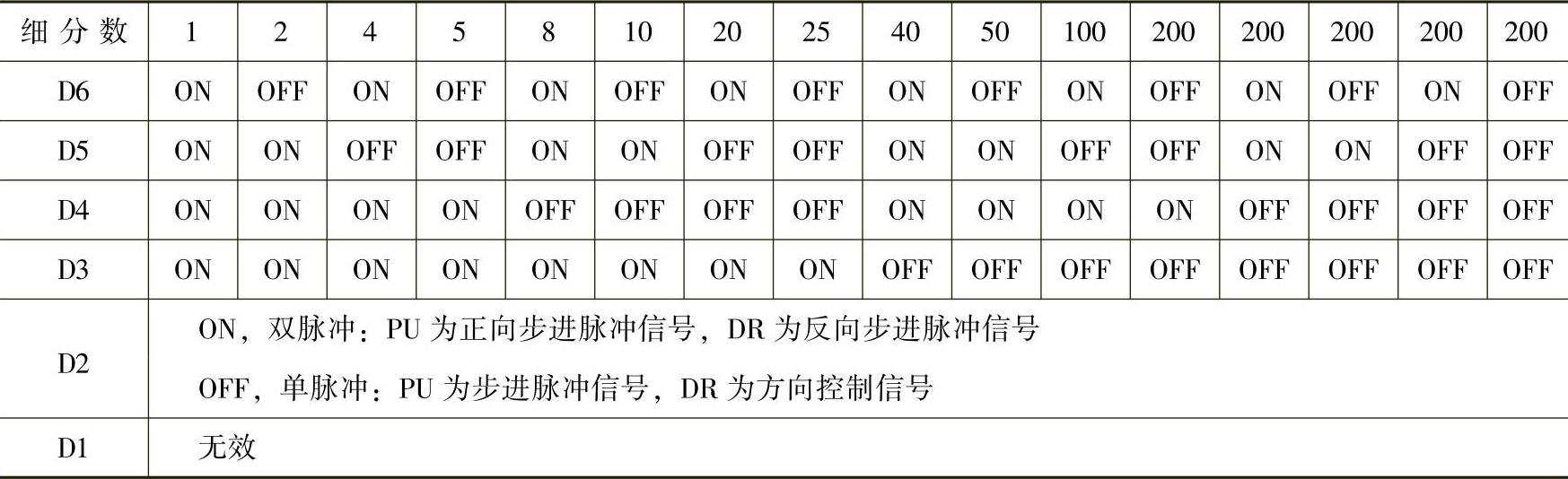
a.设定细分数。参照表4.12-6,使用步进驱动器上的细分设定开关来设定细分数。在系统频率允许的情况下,尽量选用高细分数。
表4.12-6 YKA2404MC步进电动机驱动器细分设定表
b.设定步进电动机工作电流。使用步进驱动器上的电动机线圈电流设定电位器来设定步进电动机的工作电流。顺时针旋转电位器,工作电流减小;逆时针旋转电位器,工作电流增大。
④运行与调试程序。
a.按下正转起动按钮SB1,Q0.0输出脉冲,步进电动机以设定的脉冲周期和个数来正转运行。
b.按下反转起动按钮SB2,Q0.1输出脉冲,步进电动机以设定的脉冲周期和个数来反转运行。
c.按下停止按钮SB3,步进电动机停止运行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。