



随着我国电子技术及计算机技术的不断发展,高速走丝电火花线切割的控制系统经历了靠模仿型控制系统、光电跟踪控制系统以及目前广泛应用的计算机数字控制系统等阶段,控制电路也经历了由分立元件到小规模集成电路再到大规模集成电路的发展过程。当今,随着数控技术的发展,高速走丝电火花线切割机床的各方面性能也在不断提高,主要体现在以下几个方面:
1)自动化程度不断提高。目前,高速走丝电火花线切割机床能够实现计算机自动编程、自动轨迹跟踪控制,自动对断丝、断电时的加工状态实施保护等功能,有些设备还能像慢走丝线切割一样,在加工过程中按预置的加工条件,实现自动转换加工参数、自动调节电极丝速度、自动检测加工状态、智能化加工轨迹跟踪进给和多次切割等功能。
2)机床的制造精度不断提高。要想实现上述自动化功能,不仅要求数字化控制系统对于完成多任务和实时监控系统的支持,机床对于执行元件的各项精度也提出了更高的要求。这些执行元件包括:各个运动部件的拖动电动机、驱动系统、传动系统及机械部件等。
3)用户界面图形化。用户界面是CNC系统与使用者之间的对话窗口,以前机床采用3B格式编程、纸带穿孔机输的方式,极大地限制了机床的加工范围。随着各种数控软件技术的普及和应用,目前编程图形化的机床已经成了主流趋势。这种用户界面为非专业用户的使用提供了方便,人们可以通过窗口和菜单进行操作,便于蓝图编程和快速编程、图形模拟、图形动态跟踪和仿真、局部显示比例缩放等功能的实现。
4)加工轨迹插补和补偿方式多样化。多种插补方式,如直线插补、圆弧插补以及空间曲线插补等。多种补偿功能,如间隙补偿、垂直度补偿、电极丝损耗量补偿等。
5)集成化、模块化。由于采用了高度集成化的CPU和大规模可编程集成电路FPGA、EPLD、CPLD,提高了数控系统的集成度和软硬件的运行速度。根据不同的功能需求,将CPU、存储器、机床电器控制、间隙检测、位置伺服、轨迹控制、电动机驱动以及控制软件都做成系列模块,使得机床控制硬件模块化,易于实现数控系统的组装、调试、检测和维修。
3.3.2.1 高速走丝电火花线切割机床数控系统的组成
高速走丝电火花线切割加工机床目前普遍采用开环控制,控制系统主要是指加工轨迹(通常称切割轨迹)控制系统、伺服进给控制系统、走丝机构控制系统、机床操作控制系统以及其他辅助控制系统等组成,数控系统的组成及其相互之间的关系如图3.3-7所示,系统中各部分的作用见表3.3-11。
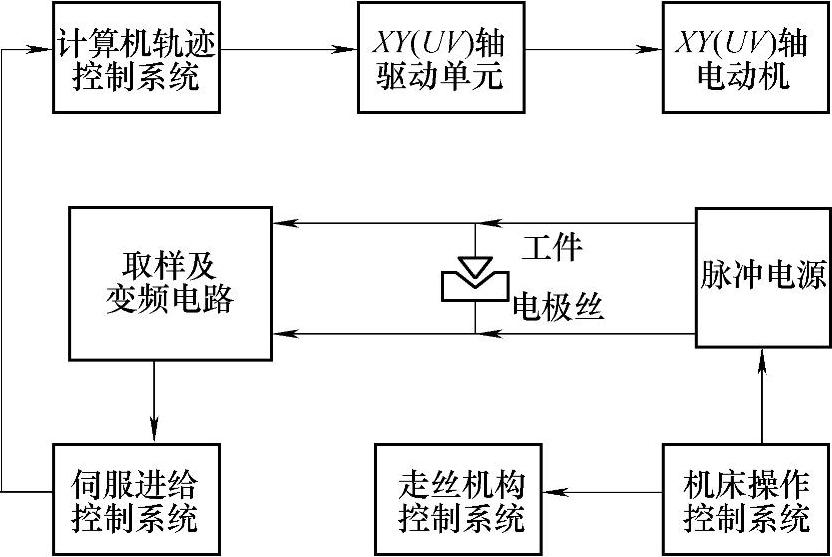
图3.3-7 高速走丝线切割机床数控系统的组成及其相互之间的关系
表3.3-11 高速走丝电火花线切割机床数控系统各部分的作用
1.加工轨迹控制方式
加工轨迹控制由于时代不同,使用的控制方式差别很大,具体结构及控制方式特点见表3.3-12。
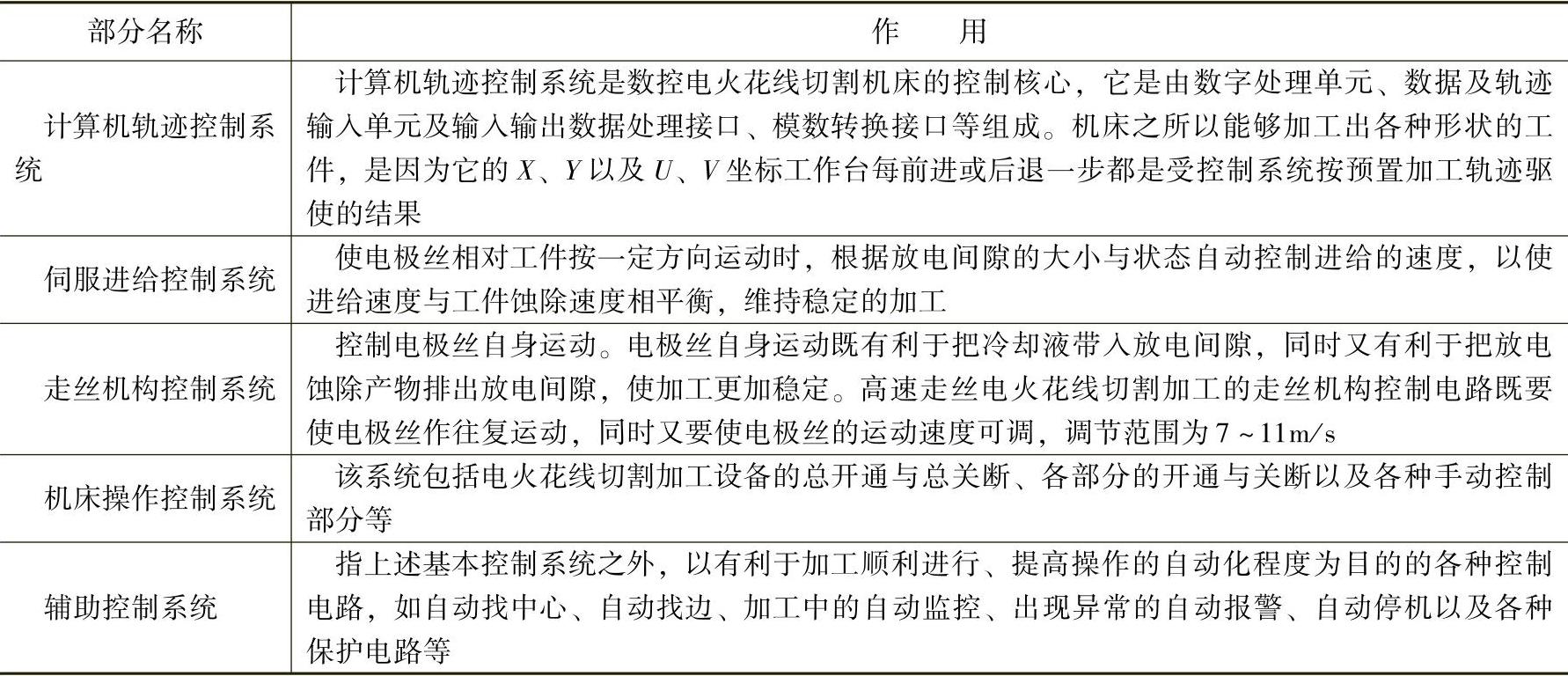
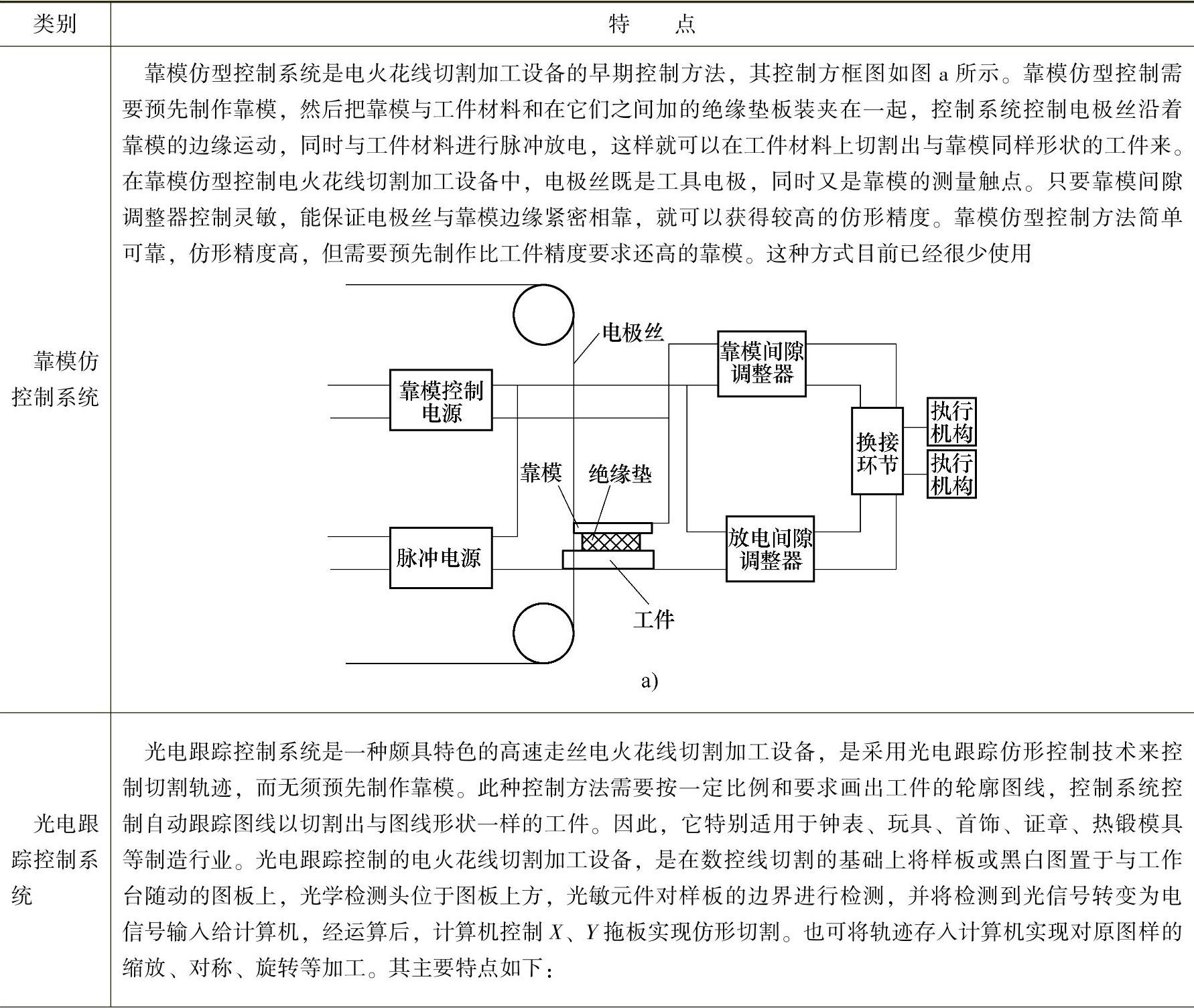
表3.3-12 加工轨迹控制系统类别及结构特点
(续)
2.计算机数字控制系统
(1)基本原理 计算机数字控制系统(简称CNC控制系统)主要功能是计算机根据“命令”控制电极丝沿给定的轨迹进行加工,此轨迹是加工工件的图形,所以必须将要进行线切割加工的工件图形用线切割控制系统可以接受的“语言”编写好“命令”,输入给计算机,这种“命令”叫做线切割程序,编写这种“命令”的工作叫做“编程”。计算机根据输入程序,进行插补运算后,通过驱动电路控制驱动电动机,由驱动电动机带动精密丝杠,使工件相对电极丝作轨迹运动。图3.3-8所示为CNC控制系统方框图。
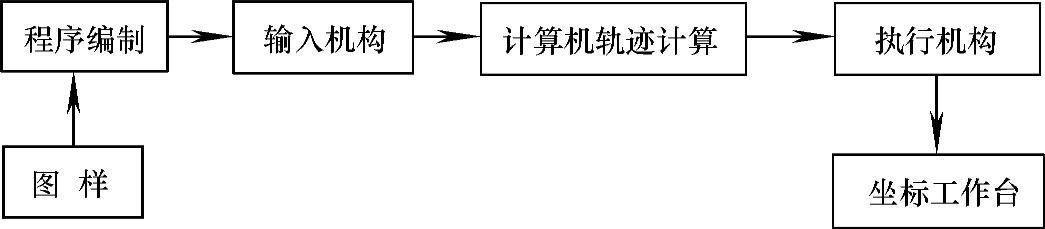
图3.3-8 CNC控制系统方框图
(2)平面加工的插补原理 所谓插补,就是指在一个曲线或工程图形的起点和终点间用足够多的短线段组成斜线来逼近所给定的曲线。
常见的工程图形可分解为直线和圆弧或其组合。常用的插补方法有逐点比较法、数字积分法、矢量判别法和最小偏差法。每种方法各有其特点,在电火花线切割控制系统中,大多采用逐点比较法的插补方法。
1)逐点比较法的插补原理。逐点比较法的插补方法是在加工过程中每进给一步,首先判断加工点相对给定线段的偏离位置,用偏差的正负表示,即偏差判别。根据偏差的正负,向逼近线段的方向进给一步,到达新的加工点后,再对新的加工点进行偏差计算,求出新的偏差,再进行判别、进给。这样,不断运算,不断比较,不断进给,总是使加工点向给定线段逼近,以完成对切割轨迹的控制。由此可知,逐点比较法每进给一步,都要经过如图3.3-9所示的四个工作节拍。
① 偏差判别。判别加工点对规定图线的偏离位置,以决定拖板的走向。
② 拖板进给。控制纵拖板或横拖板进给一步,向规定的图线逼近。

图3.3-9 逐点比较法进给的四个节拍方框图
③ 偏差计算。对新的加工点进行计算,得出反映偏离位置情况的偏差,作为下一步的依据。
④ 终点判别。当进给一步并完成偏差计算之后,应判断是否到达图线终点。如果已到达终点,则发出停止进给命令;如果未到达终点,则继续重复前面的工作节拍。
如果切割轨迹为斜线时,若加工点在斜线的下方,计算机计算出的偏差为负,这时控制加工点沿Y轴正方向移动一步;若加工点在斜线的上方,计算机计算出的偏差为正,这时控制加工点沿X轴正方向移动一步,如图3.3-10a所示。同理,切割圆弧时,如图3.3-10b所示,若加工点在圆外,应控制加工点沿X轴负方向移动一步;若加工点在圆内,应控制加工点沿Y轴正方向移动一步。据此,使加工点逐点逼近已给定的图线,直至整个图形切割完毕。
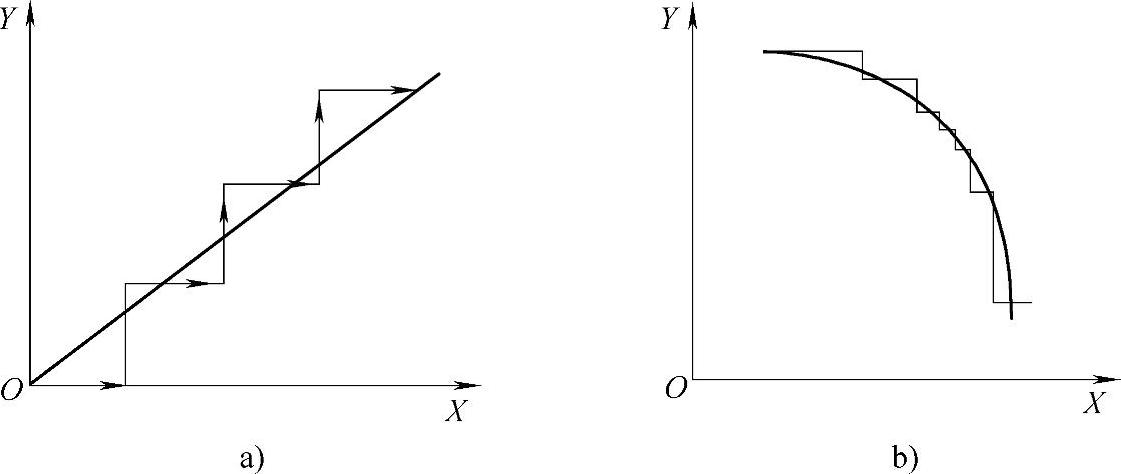
图3.3-10 逐点比较法原理示意图
a)切割斜线 b)切割圆弧
2)偏差计算。主要包括加工圆弧和加工斜线时的偏差计算。
① 加工圆弧时的偏差计算。设待加工圆弧为第一象限逆圆AB,其半径为R,取圆心为坐标原点O,起点为M,坐标值为XM、YM,如图3.3-11所示。
由图可知,OM的距离为RM,比较R和RM或R2和R2M,即可知M点是在圆弧内,还是在圆弧外,还是在圆弧上。如果取R2M与R2的差值作为偏差,记为FM,则

当FM=0时,加工点在圆弧上;FM>0时,加工点在圆弧外;FM<0时,加工点在圆弧内。
运用公式(3.3-1)计算偏差较繁琐,这里采用递推法可得到更简单的计算公式。所谓递推法就是每进给一步时,新加工点的偏差用前一点的加工偏差来推算。
假定M点在圆外,那么下一步应沿X方向向圆内进给一步,到达N点,则
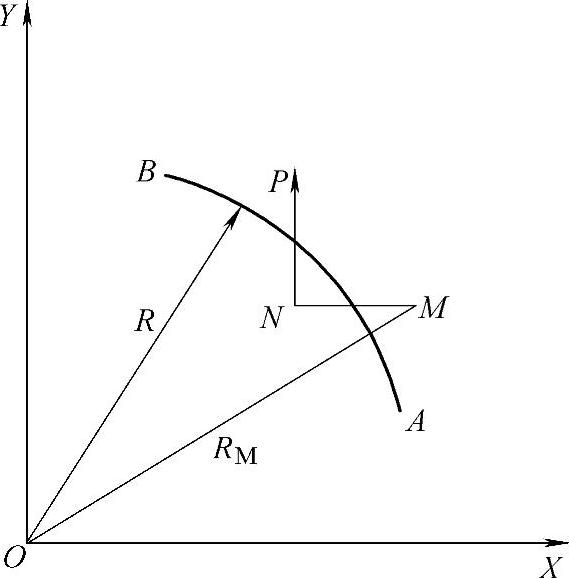
图3.3-11 加工第一象限逆圆
XN=XM-1,YN=YM (3.3-2)
N点的偏差:

式(3.3-3)就是FM≥0时,FN与FM间的递推公式。如果加工点在圆内,则FM<0,那就应该沿Y方向向圆外进给一步,到达P点,则有
XP=XN,YP=YN+1 (3.3-4)
P点的偏差:

式(3.3-5)就是FN<0时,FP与FN间的递推公式。
上述结果说明,只要知道了某点的偏差和坐标,就可以用递推法不断地计算以后各点的偏差与坐标。在加工中,起点的坐标是已知的,而起点的偏差值为零。这样,就可以由起点逐点递推计算下去。
以上是指第一象限逆圆情况,第三象限逆圆及第二、四象限顺圆情况与之类似。第一、三象限顺圆和第二、四象限逆圆情况,也可按同样分析方法求出,其计算公式见表3.3-13。
表3.3 - 13 加工圆弧时偏差计算公式
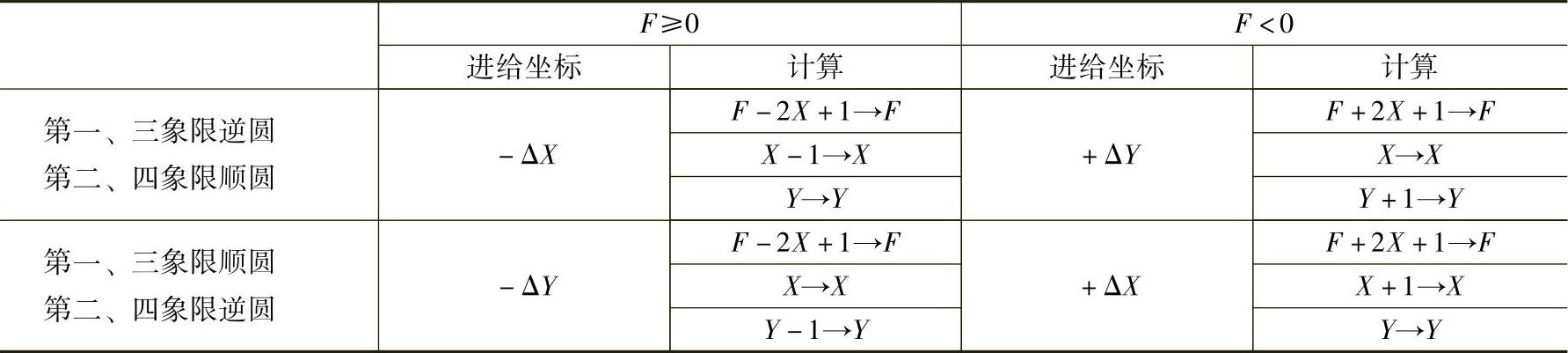
注:表中箭头左边是进给前的数值,右边是进给后的数值。X、Y都是动点坐标,只考虑绝对值,不考虑正负。-ΔX、-ΔY是指向X、Y坐标轴反方向的进给。
② 加工斜线时的偏差计算。把坐标原点O取在斜线的起点上,设终点A的坐标为Xe、Ye,M为某一时刻的加工点,如图3.3-12所示。这需要先判别M点是在OA线的上方,还是下方,还是线上,其加工点偏差可以用比较OM与OA的斜率的办法来判别。
OM与OA的斜率分别为KM=YM/XM,KA=Ye/Xe,比较它们的大小可有:

因为加工点偏差的判别只取决于差值的正负,而与差值的绝对值无关,所以我们只要比较式(3.3-6)分子的大小,就可以得出斜线的加工偏差,故取

当FM=0,即KM=KA时,表明M点在OA线上;FM>0,即KM>KA时,表示M点在OA线的上方;FM<0,即KM<KA时,则M点在OA线的下方。
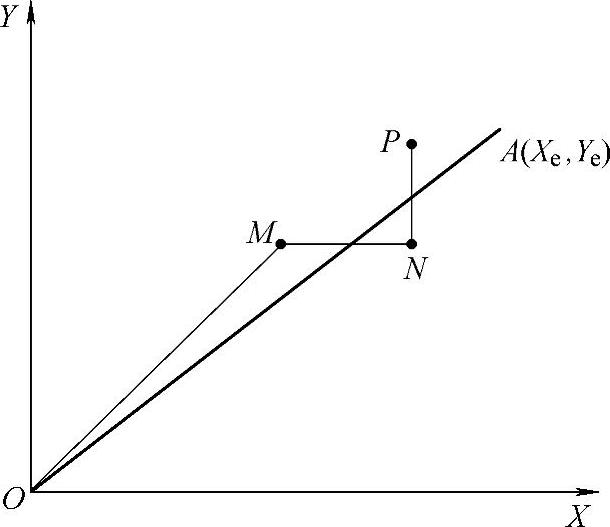
图3.3-12 加工第一象限斜线
为简化偏差计算公式,这里也采用递推法来推导直线偏差计算公式。
对于M点,FM>0时,应使X向正方向进给一步,到达N点,则有

N点的偏差:

对于N点,FN<0,应使Y向正方向进给一步,到达P点,则有

P点的偏差:

以上是第一象限斜线的情况。从式(3.3-9)和(3.3-11)中可知,斜线的偏差计算只用到终点坐标值,而不必计算加工点坐标值。这和圆弧的情况不一样。第三象限情况与第一象限基本相同,只是进给方向相反。而第二、第四象限的偏差计算公式和进给坐标,与第一、第三象限不同,详见表3.3-14。
表3.3 - 14 加工斜线时偏差计算公式

图3.3-13所示为F>0和F<0的两种规定,第二、第三、第四象限的偏差计算和第一象限情况完全一样,只是进给方向各有区别。必须指出,在控制从起点到终点按拖板进给总长度来进行终点判别时,上述Xe和Ye是作为表示斜线率的参数,故可以按比例放大或缩小。
由上述分析可知:对于圆弧只要给出象限、顺圆或逆圆、起点坐标,对于斜线只要给出象限、终点坐标,就可以采用逐点比较法进行偏差计算,然后经过判别一步一步地控制拖板的运动,实现对切割轨迹的控制。
3)终点判别。一个工件图形,一般是由若干段圆弧和直线组成的,可以编制很多条程序分段加工。但为使一段线段到达终点时,能够自动结束加工,还必须有终点判别环节。
终点判别可以根据终点坐标及应到的象限进行判别,也可以根据某一坐标方向的进给步数来判别,后者应用得较多。在加工圆弧或斜线时,可把某一坐标方向应进给的总步数(计数长度)输入计算机。加工时,在该坐标方向进给一步,计数长度即减一,直到减至为零时,加工结束。
用这种方法进行终点判别时,必须正确选择计数方向,以保证在非计数方向上不产生误差,使实际终点与理论终点重合。然而,在加工圆弧时,理论终点的坐标值往往不会同时为整数,所以实际终点与理论终点不会完全重合,但在X、Y两个方向上的偏离都不大于1μm。为此,计数方向可按下述原则确定:当斜线的斜率小于1,或圆弧终点的斜率小于1时按X方向计数,否则按Y方向计数,如图3.3-14所示。换句话说,可以在X、Y坐标中心线分界,即在45°线处分界,图中的阴影部分计X方向,非阴影部分计Y方向。
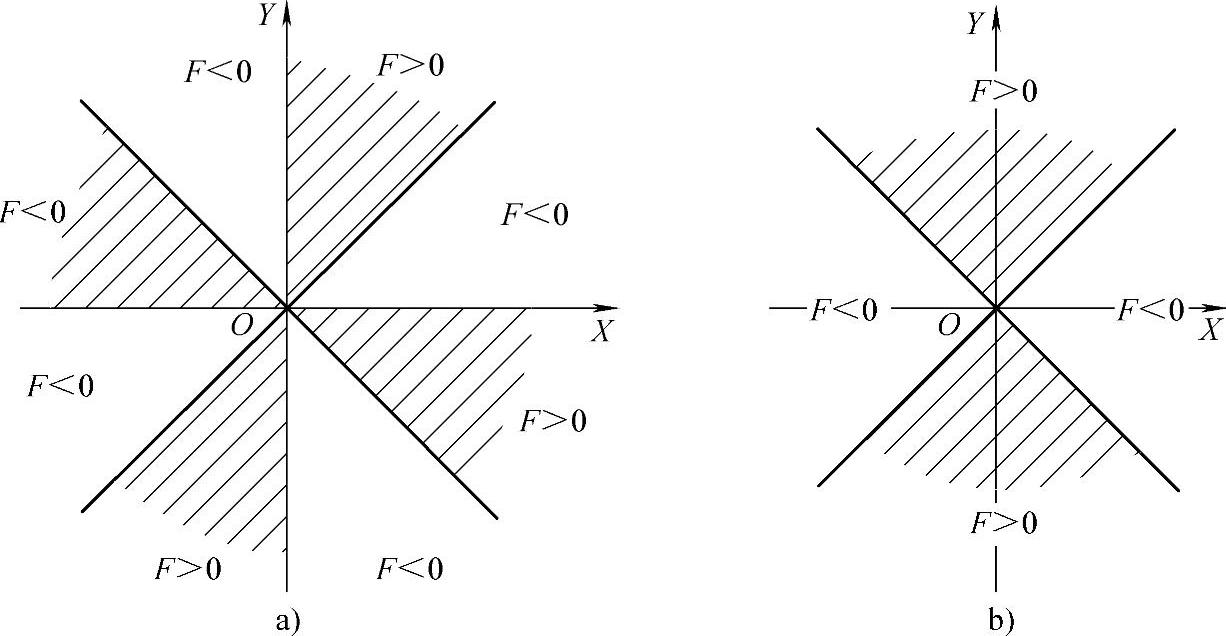
图3.3-13 F>0和F<0的规定
a)F>0和F<0的一种规定 b)F>0和F<0的另一种规定
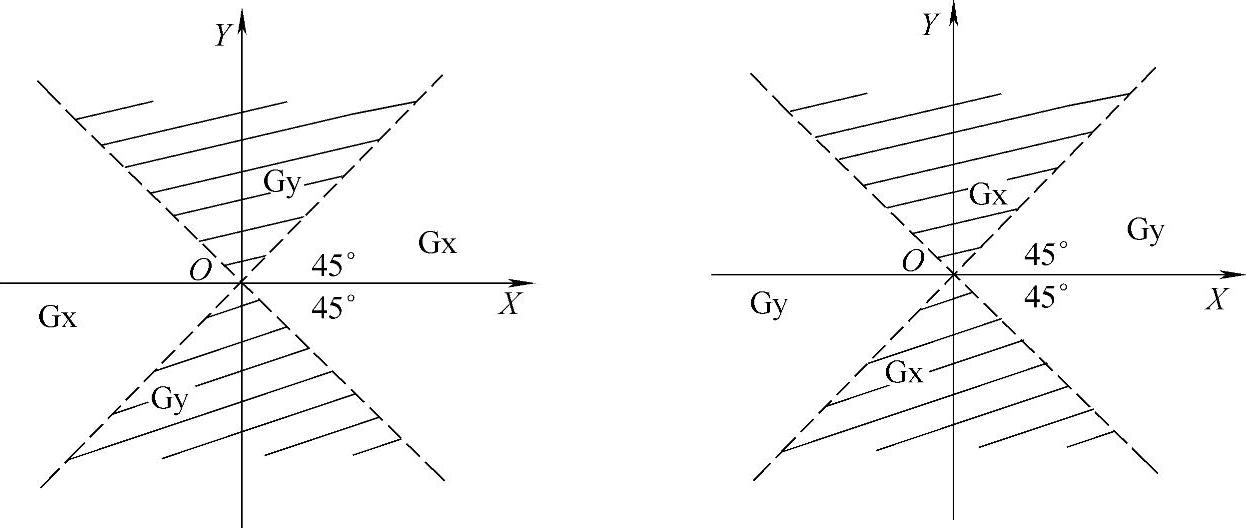
图3.3-14 计数方向的选择方法
(3)锥度加工的插补原理 普通切割机床的电极丝固定在床身的线架上,分别由上、下两个导轮支承,电动机拖动工作台上的工件沿着X轴、Y轴方向移动,切割加工时,电极丝相对工件保持垂直相对移动,所切割出的工件截面是相同的。而带锥度切割功能的线切割机床的上线架顶端有两块分别与X、Y轴相平行的运动拖板,一般成为U、V拖板,如图3.3-15a所示。由U、V拖板带动电极丝的上端作以电极丝下端为原点的电极丝倾斜运动,该运动与X、Y轴的运动合成使电极丝在空间的运动轨迹形成三维曲面,因此可以实现锥度切割。
在编程时,锥度加工同平面加工一样,也采用逐点比较的控制方法。平面加工在控制加工一个脉冲当量(一般为1μm)后,与加工轨迹进行比较,从而确定加工的方向。锥度加工参考平面加工方法,采用“逐面比较法”,每加工一个小的锥面,与加工轨迹进行比较,判断电极丝的位置,然后计算出要加工的小锥面,决定X、Y、U、V各坐标轴的走向及走的步数。如图3.3-15所示,锥度加工是由无数个这样的小斜面组成的。
图3.3-15b所示为在XOZ平面,U轴控制电极丝达到锥角要求,X轴控制工作台面带动工件移动达到工件的尺寸要求。U轴移动的距离可由公式(3.3-12)得出:
L=H×tan(β) (3.3-12)式中,β为要达到的锥角,H为Z轴移动的距离。单纯U轴移动不仅使电极丝达到一定的斜度,同时在工件上、下平面产生一定的加工距离,而X轴带动工件整体移动,达到工件要求的尺寸。
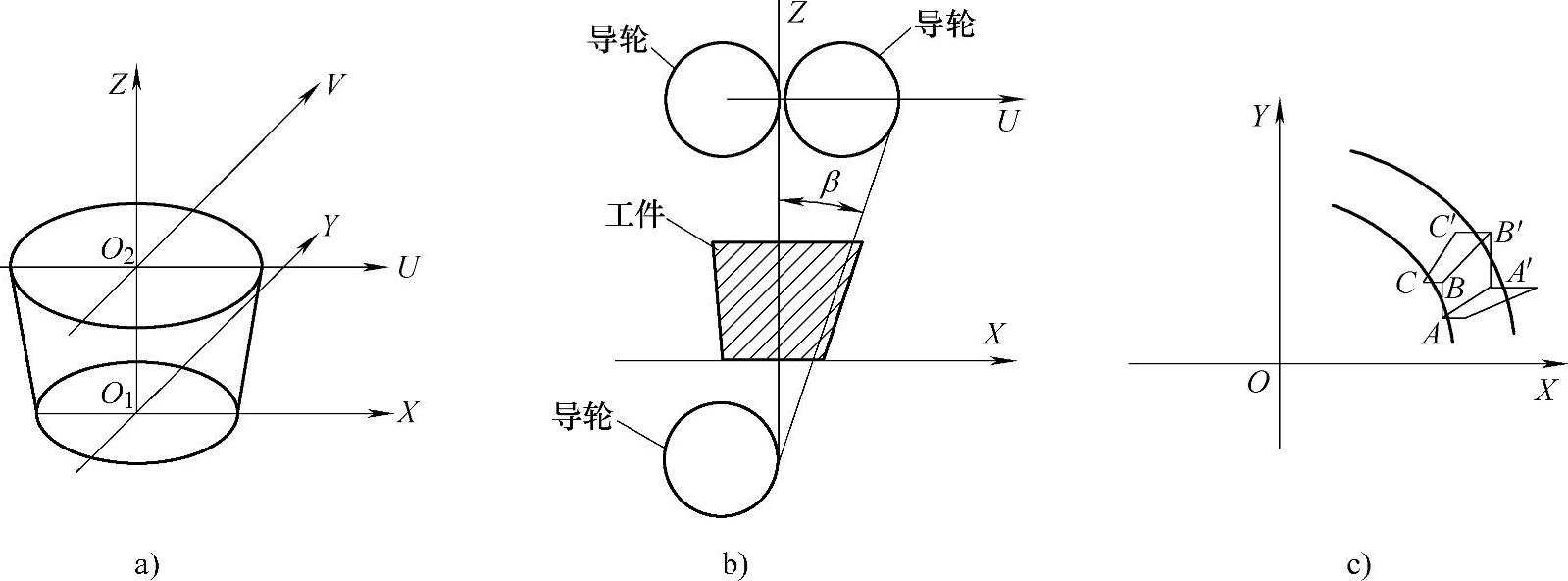
图3.3-15 锥度加工插补原理示意图
a)线架与工作台运动示意图 b)XOZ平面 c)YOZ平面在XOY平面的投影
以上、下两平面均为圆的圆锥台为例进行说明。如图3.3-15c所示,下平面加工到A点,上平面加工到A′点,两点均在圆弧内,为了逼近上下平面圆弧,控制应使加工到B和B′点,这样,在YOZ平面就产生了小锥面AA′BB′,到达BB′后,再进行比较,如果BB′均在圆弧的外面,控制应使加工朝向CC′的方向,此时,在XOZ平面又形成一个小锥面。以此类推,直至完成圆锥台的加工。
3.3.2.2 伺服进给控制系统
线切割加工的进给速度不能采用等速方式,而必须采用伺服进给的方式。对于高速走丝电火花线切割加工来说,所谓伺服进给控制系统,就控制是使工件在进给方向的进给速度等于金属蚀除速度并保持某一合适的放电间隙的系统。
1.伺服进给速度的控制方法
在电火花线切割加工中,加工进给速度是由变频电路控制的,它使电极丝进给速度“跟踪”工件的蚀除速度,防止放电间隙开路或短路,而自动维持一个合适的放电间隙。它的控制方法是:在加工过程中根据工件和电极丝之间的放电间隙大小决定进给速度。间隙大,则加速进给;间隙小,则放慢进给;间隙为零时,则为短路状态,短路状态超过一定时限,电极丝按原轨迹回退,以消除短路状态。
由于在实际加工时,放电间隙很小,无法测量间隙的实际大小,故通常测量与放电间隙大小有一定关系的间隙电压来作为判断间隙大小变化的依据,此测量值一般为间隙平均电压。然后将测量的间隙平均电压输入给变频电路。变频电路为一电压—频率转换器,它把放电间隙中平均电压的变化成比例地转换成频率的变化,间隙大,间隙平均电压高,变频电路输出脉冲频率高,进给速度则高。反之,间隙小,间隙平均电压低,变频电路输出脉冲频率低,进给速度则低或停止进给。从而实现了线切割加工的自动伺服进给。
其次,若线切割机床不处于放电加工状态时,需要使工作台移动一段距离,这时可以将自动伺服进给的开关由“自动”挡变换为“手动”变频挡,变频电路内部提供一个固定的直流电压来代替放电间隙的平均电压,再经变频电路输出一定频率的脉冲,触发插补运算器使X、Y(或U、V)轴移动一步。
此外,还可以采用光电耦合器把放电间隙与取样部分电路隔离,使这两部分没有直接的电联系,减少了间隙放电对取样信号的干扰,提高了变频电路的稳定性。
图3.3-16所示为一典型变频电路。在此变频电路中,电压取样信号分别取自工件和电极丝,取出工件和电极丝之间的间隙电压,再经过一个36V稳压管,使3点电压的峰值得到一定限幅,由两个电容和一个电阻组成的Π形滤波器,将以衰减的高频信号进行整流和滤波,变成近似直流电压信号。12V稳压管也是起限幅作用,正常加工时它不起作用,在间隙开路时,它限制取样电压E(取样),使其不能太高,以保护后面的电路。E(取样)用电压经光电耦合把变频信号输入给以单结晶体管BT为主的变频电路。由9点输出变频脉冲至轨迹控制计算机。
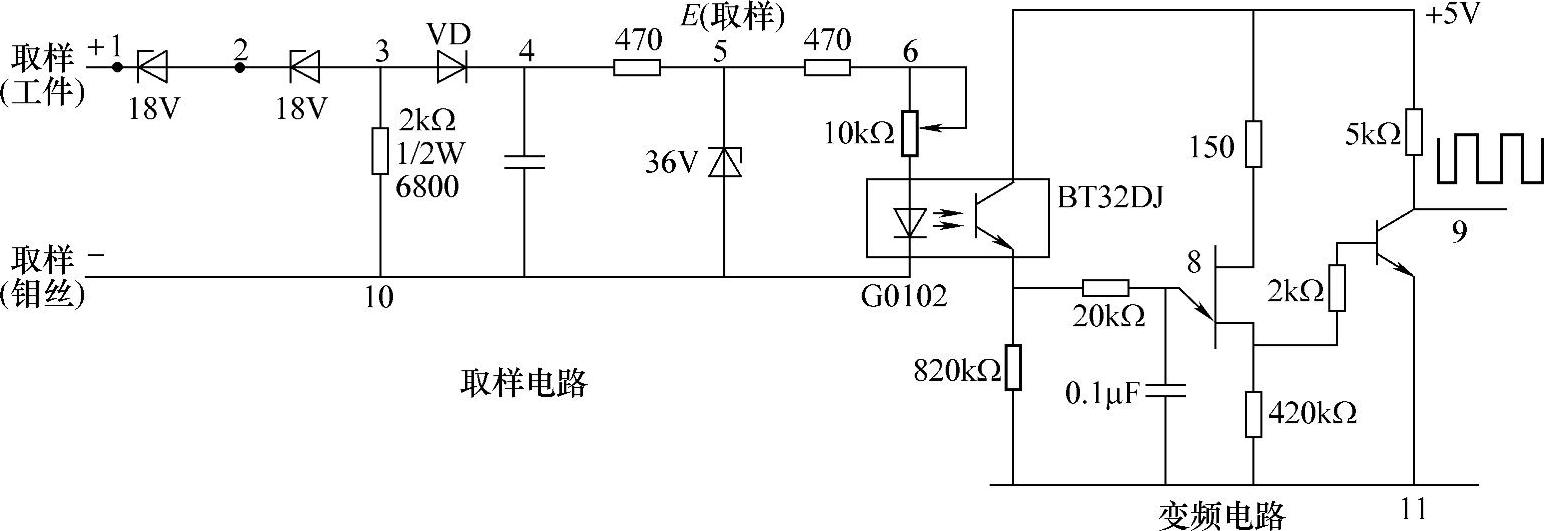
图3.3-16 间隙电压取样及变频进给控制电路原理图(https://www.xing528.com)
间隙电压取样和变频电路有许多种形式,图3.3-17所示为一种用LM331作压频转换的变频电路,当E(取样)电压信号为高电位或接入DC+12V时,LM331的3脚输出脉冲信号。调节2.2kΩ变频调节电位器,EB电压升高时,LM331的3脚输出脉冲频率高,反之输出脉冲频率则低。输出脉冲经9014三极管VT1、VT2、VT3和光电偶合器TIL117后所得的变频脉冲,再输入计算机,作为控制计算机发出控制步进电动机进给信号的脉冲频率。
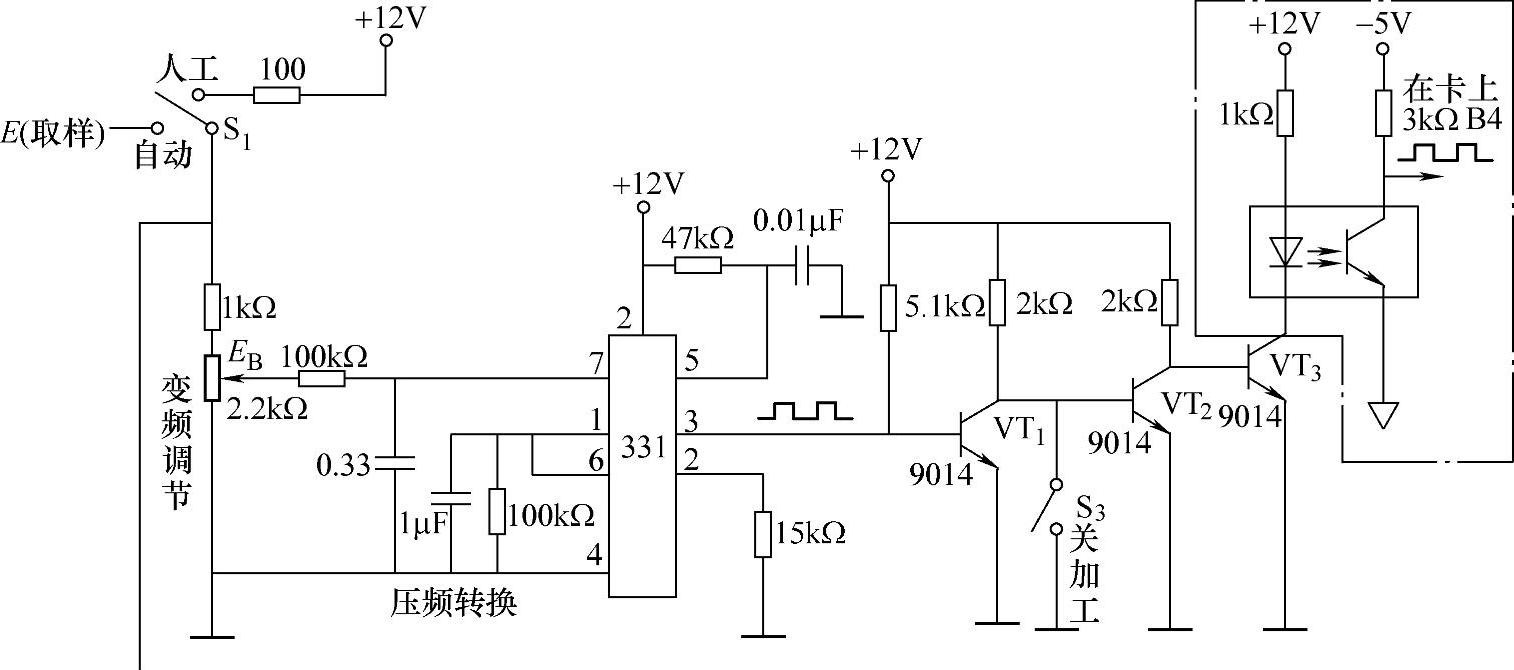
图3.3-17 LM331变频电路
2.伺服进给驱动电路
一般高速走丝电火花线切割机床采用步进电动机作为工作台驱动元件。步进电动机有混合式和反应式两种,分别有两相、三相、四相、五相等多种规格。目前,三相反应式步进电动机应用最为广泛。
(1)反应式步进电动机驱动电路 国产高速走丝电火花线切割机床常用的是75BF003三相反应式步进电动机。其结构示意如图3.3-18所示,定子上有三对开小齿(A、B、C三相)磁极。A、B、C三相中可单相或两相同时通电,通电使磁极产生磁力吸引,转子转成某一位置,从而控制步进电动机转动。转动的方式为三相六拍方式,通电顺序按A→AB→B→BC→C→AC→A,每转换一次,步进电动机旋转1.5°,若通电顺序按A→AC→C→BC→B→AB→A,电机转子反方向转动1.5°,故电动机步距角为1.5°。步距角θ计算方式为:

图3.3-19所示为采用IRF640场效应晶体管作为功放管驱动步进电动机的电路原理图。由计算机接口电路发出进给信号Xao、Xbo、Xco、Yao、Ybo、Yco,经驱动芯片MC1413,直接驱动场效应晶体管的栅极,MC1413起一定的放大和隔离作用。此电路在高速走丝线切割控制步进电动机驱动电路应用广泛,且效果较好。
由于步进电动机步距角的限制,无法实现线切割机床步进脉冲当量为1μm的要求,同时电动机功率也较小,因此,在步进电动机与工作台丝杠之间必须加装齿轮减速箱以满足脉冲步进当量为1μm的要求,但增加了机床传动误差。随着电动机技术的不断发展,近年来开发了多种步进电动机细分驱动器,将步进电动机的步距角细分成小的步距角,这样就可以减去变速箱,提高了机床传动精度和机床运行的平稳性。
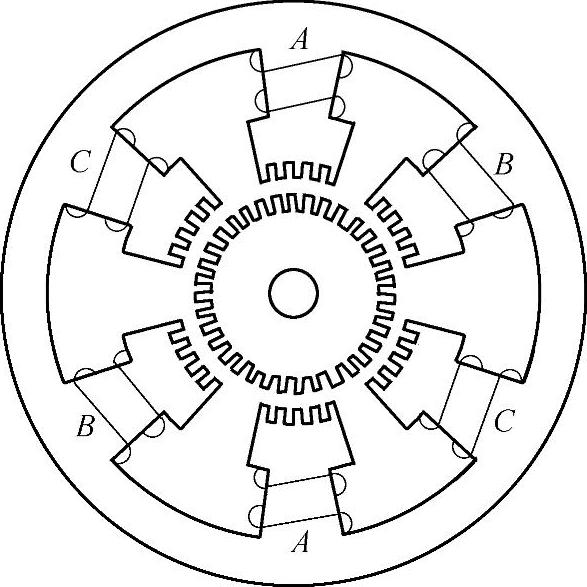
图3.3-18 反应式步进电动机结构示意图
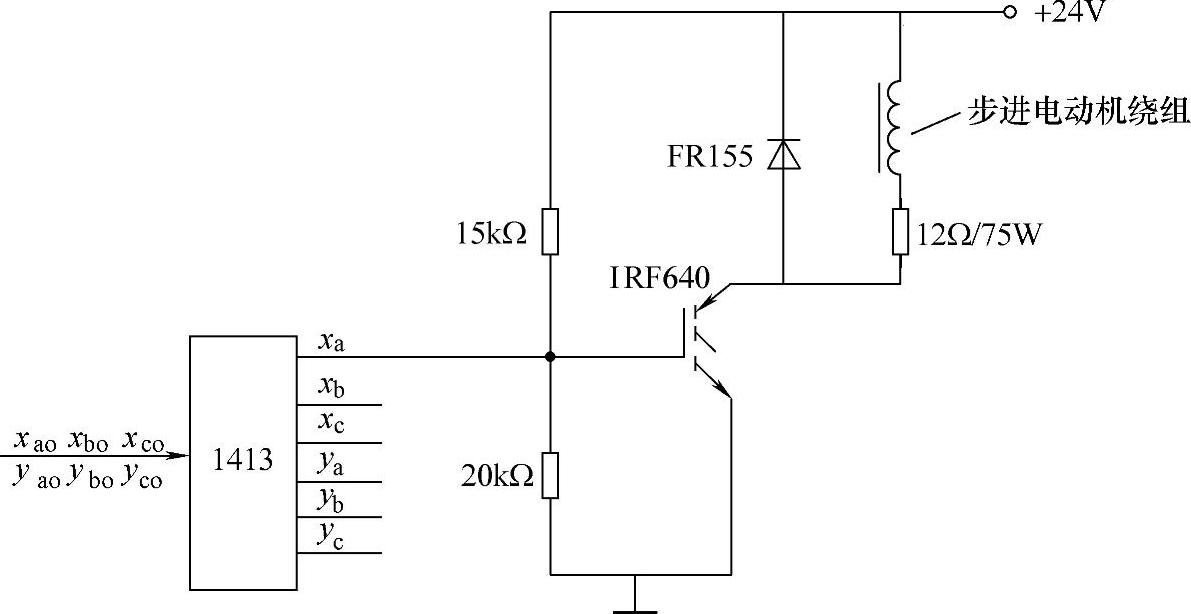
图3.3-19 场效应晶体管步进电动机驱动电路
(2)混合式步进电动机细分驱动电路原理与常用接法 三相六拍反应式步进电动机驱动电路简单,工作也较稳定,但其转动速度较低,一般为300步/s,快速运转时就会造成失步。而混合式步进电动机经过细分后,可大大提高速度,同时电动机运行更加平稳,近年来被广泛应用。典型电路接法如图3.3-20所示。
3.3.2.3 加工程序的编制方法
编程方法分为手工编程和计算机编程。手工编程是快走丝线切割操作者必需掌握的基本功,它能使人们比较清楚地了解编程所需的各种计算和编制进程,但计算量比较大,比较费时间。随着计算机技术的不断发展,目前大都采用计算机自动编程——CAD/CAM自动编程方法。
编程的目的是为了生成线切割控制系统所需要的加工代码。目前高速走丝电火花线切割加工代码大都采用3B代码的程序格式,也有采用国际标准ISO代码格式的。为了便于国际交流和标准化,我国生产的线切割控制系统已逐步采用ISO代码格式。
1.3B代码程序编制方法
3B程序为相对坐标程序,即每一图线的坐标原点随图线发生变化,直线段的坐标原点为直线起点,圆弧段的坐标原点为此圆弧的圆心。
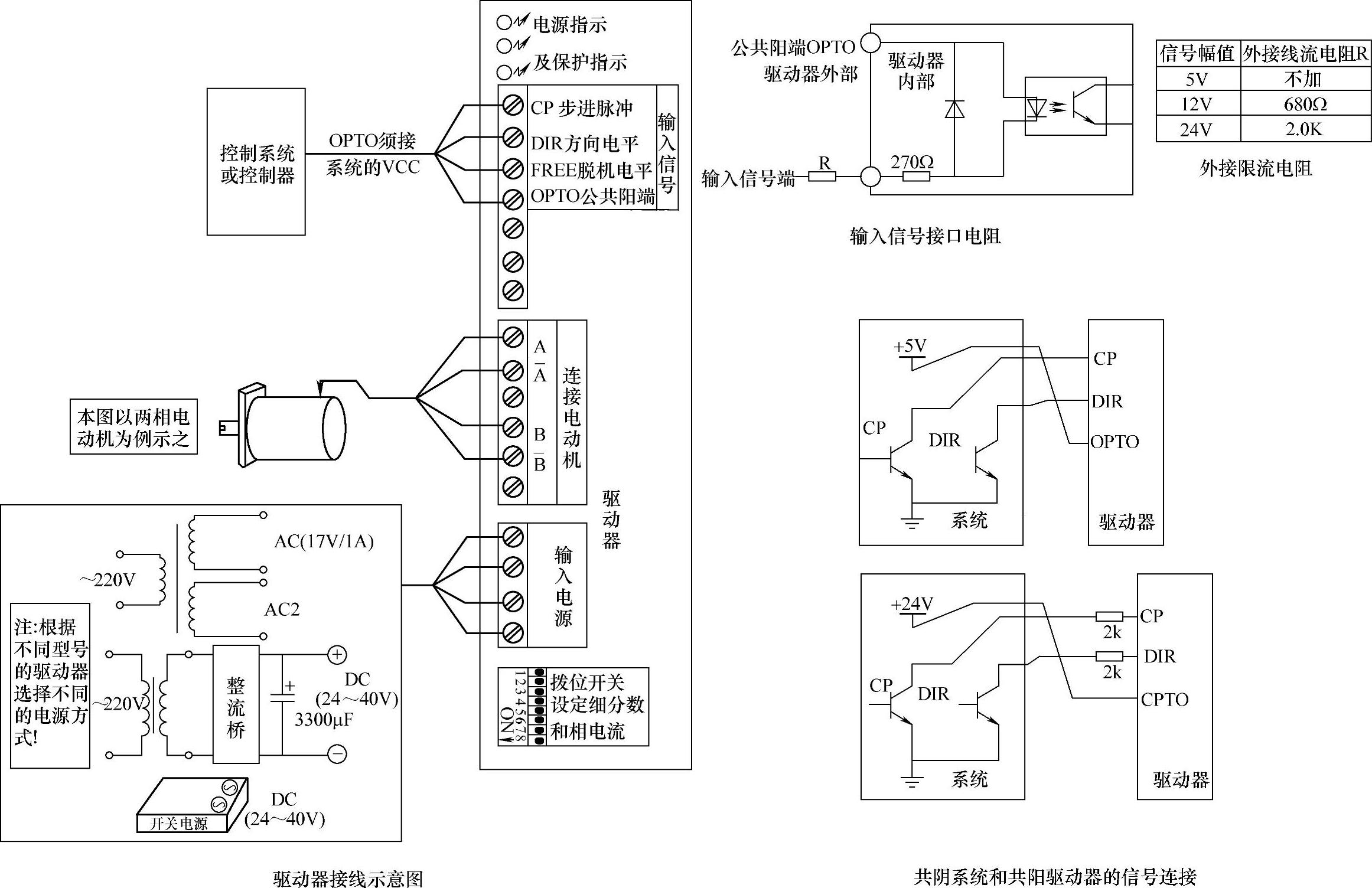
图3.3-20 混合式步进机细分驱动电路典型接法
(1)3B代码程序格式3B代码程序格式为:BX BY BJ G Z。其中,B为分隔符;X、Y为坐标值(直线为终点坐标,圆弧为起点坐标);J为计数长度;G为计数方向(GX为X方向计数,GY为Y方向计数),表示工作台在该方向每走1μm(1个脉冲当量)时,计数长度减1,当累计减到计数长度等于0时,这段程序加工完毕;Z为加工指令。
加工指令分为直线和圆弧两大类。直线按走向和终点所在象限,分为L1、L2、L3、L4,如图3.3-21所示。圆弧按第一步进入的象限及走向,分为顺圆和逆圆,顺圆分别为SR1、SR2、SR3、SR4,逆圆分别为NR1、NR2、NR3、NR4,如图3.3-22所示。
对于圆弧加工指令来说,圆弧起点决定加工指令。顺圆时,起点位于第一、第二、第三、第四象限时,应选取为SR1、SR2、SR3、SR4。当起点位于X轴时,正向取SR4,反向取SR2;当起点位于Y轴时,正向选取SR1,反向选取SR3。逆圆时,起点位于第一、第二、第三、第四象限时,应选取为NR1、NR2、NR3、NR4。当起点为X轴时,正向选取NR1,反向选取NR3,当起点位于Y轴时,正向选取NR2,反向选取NR4。
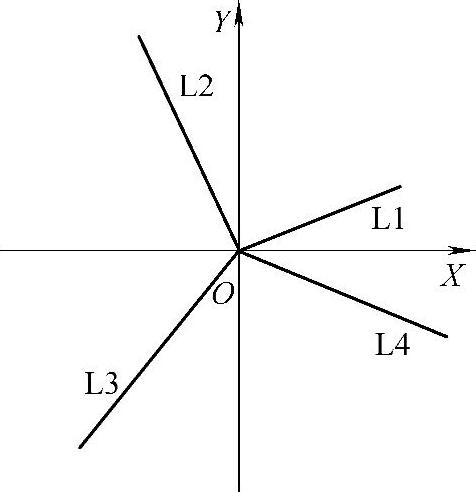
图3.3-21 直线加工指令的确定
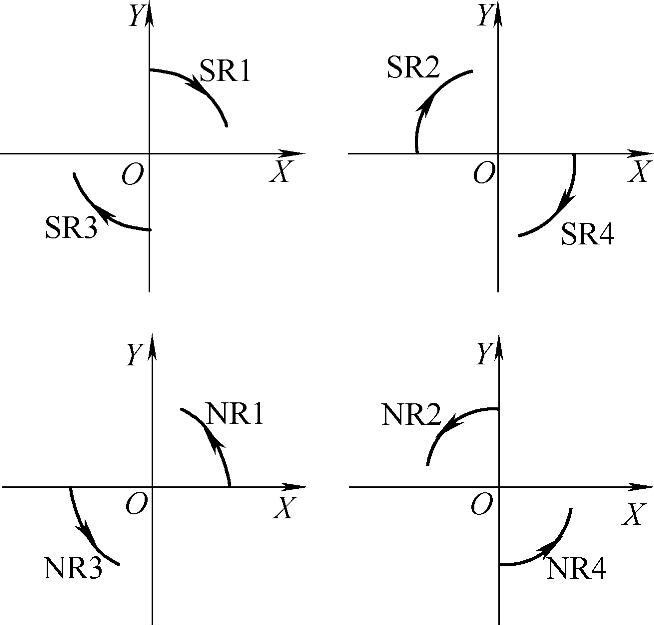
图3.3-22 圆弧加工指令的确定
(2)直线的编程方法
1)直线的起点作为坐标的原点。
2)X、Y值均为终点相对起点的坐标值的绝对值。
3)计数长度J是计数方向上该直线在X或Y轴上的投影值。
4)计数方向。当终点的坐标值决定计数方向:|X|>|Y|时,则取X方向计数;|X|<|Y|时,则取Y方向计数;|X|=|Y|时,则有两种情况:当终点位于第一、第三象限时,取X方向计数,GX;当终点位于第二、第四象限时,取Y方向计数,GY。
(3)圆弧的编程方法
1)将圆弧的圆心作为坐标原点。
2)X、Y为圆弧起点相对于圆弧圆心的坐标值。
3)计数长度J是计数方向上圆弧在X、Y轴各象限投影长度之和。
4)计数方向按圆弧的终点计算,取终点坐标较小的一个轴作为计数方向。
5)对圆弧加工指令,按圆弧插补时第一步所进入的象限可分为R1、R2、R3、R4,按切割方向又分为顺、逆圆两种,顺圆为S、逆圆为N,故共有八种加工指令SR1~SR4,NR1~NR4。
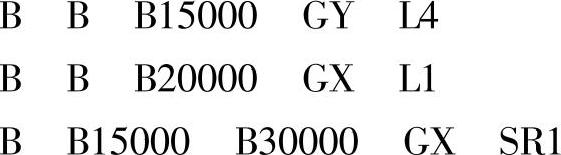
(4)3B代码编程举例 如图3.3-23所示加工图形,其3B指令程序如下:
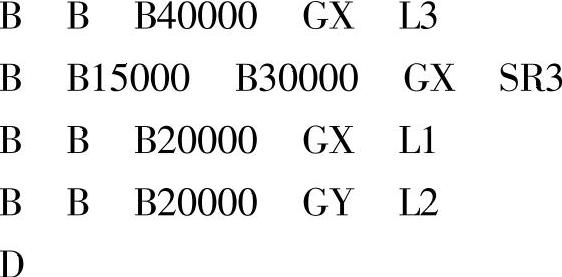
2.ISO代码程序编制方法
ISO代码是国际标准化机构制定的用于数控的一种标准代码。代码中分别有G指令(称为准备功能指令)、M指令(称为辅助功能指令)等。用ISO代码进行编程是今后数控加工的必然趋势。
(1)ISO代码程序格式ISO代码程序格式为:N××××G×× X×××××× Y×××××× I××××××J××××××
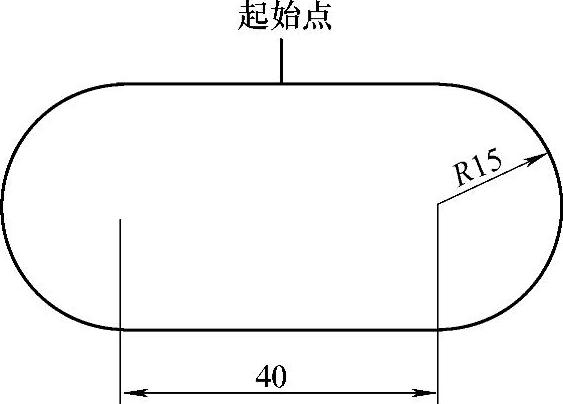
图3.3-23 3B代码编程举例
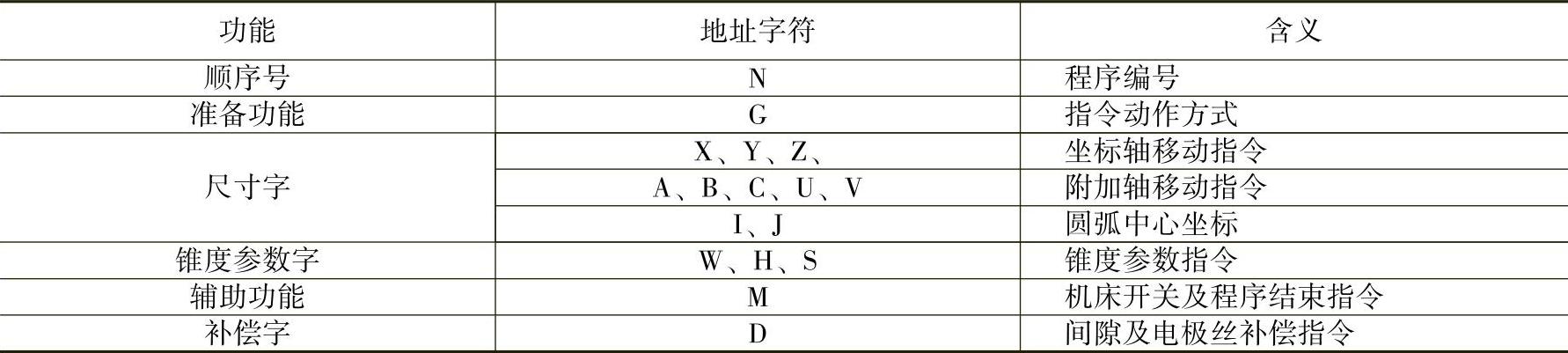
代码是组成程序段的基本单元,一般是由一个关键字母加若干位十进制数字组成,这个关键字母成为地址字符,不同的地址字符表示的功能也不一样。表3.3-15所示为地址字符的含义和功能对照。
表3.3-15 地址字符的含义和功能
1)程序段号N位于程序段之首,表示一条程序的序号,后续2~4位数字,如N0012,N1234。
2)准备功能G是建立机床或控制系统工作方式的一种指令,其后续为两位正整数,即G00~G99;当本段程序的功能与上一段程序功能相同时,则该段的G代码可省略不写。
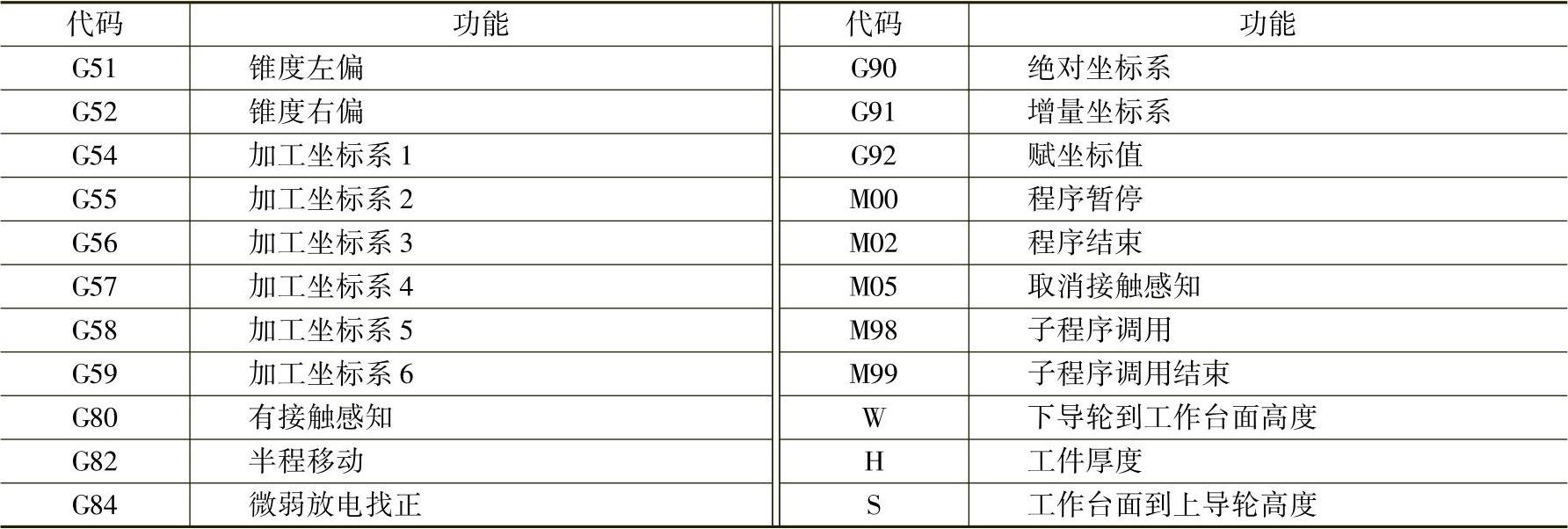
表3.3-16所列为高速走丝电火花线切割加工机床中最常用的ISO代码。它是从切削加工机床的数控系统中套用过来的,不同机床的代码,可能有多有少,含义上也可能稍有差异,具体应遵照所使用高速走丝电火花线切割加工机床说明书中的规定。
表3.3-16 高速走丝电火花线切割加工机床常用的ISO代码
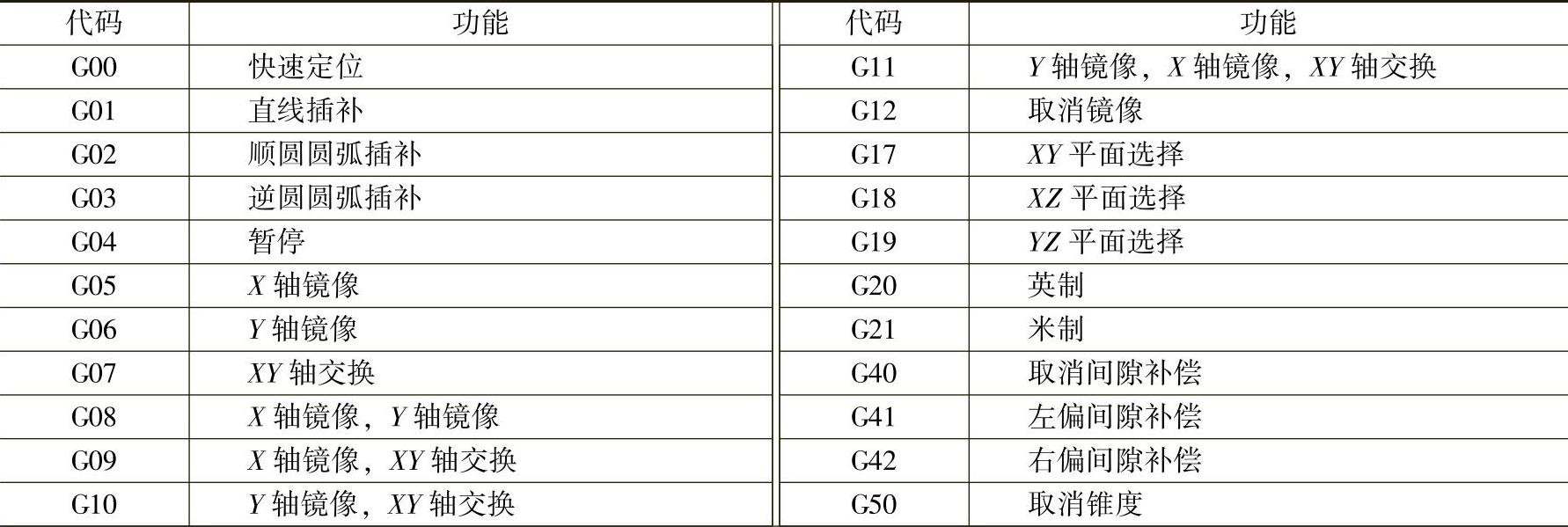
(续)
G00表示点定位,即快速移动到某给定点。在非加工情况下,G00指令可使指定的某轴以最快速度移动到指定的位置,其程序段格式为:G00 XY。这里请注意,如果程序段中有了G01或G02指令,G00指令无效。
G01表示直线插补。目前,锥度加工线切割机床有X、Y坐标轴及U、V附加轴工作台,程序段格式为:G01 XYUV。
G02表示顺圆插补。
G03表示逆圆插补。
G04表示暂停。
G90表示绝对坐标方式输入。
G91表示增量(相对)坐标方式输入。
G92为工作坐标系设定,即将加工时绝对坐标原点设定在距离当前位置的一定距离处。例如,G92X5000Y20000表示以坐标原点为坐标,令电极丝中心起始点坐标值为X=5mm,Y=20mm的位置。坐标系设定程序只设定程序坐标原点,当执行此条程序时,电极丝仍在原位置并不产生运动。
3)尺寸字。尺寸字在程序段中主要是用来控制电极丝运动到达的坐标位置。电火花线切割加工常用的尺寸字有X、Y、U、V、A、I、J等,尺寸字的后续数字应加正负号,单位为μm。
4)辅助功能代码由M功能指令及后续两位数组成,即M00~M99,用来指令机床辅助装置的接通或断开。
(2)ISO代码的两种表达方式
1)绝对坐标方式G90。绝对坐标方式时,X、Y坐标值均以绝对坐标值表示。
①直线:以线段中的某一点为坐标原点,用±X、±Y表示终点的绝对坐标值,如图3.3-24a所示。
②圆弧:以圆形中某一点为坐标原点,用±X、±Y表示某段圆弧终点的绝对坐标值,I、J表示圆心对圆弧起点的坐标值,如图3.3-24b所示。
2)增量(相对)坐标方式G91
①直线:以线段起点为坐标原点,用±X、±Y表示线段的终点相对起点的坐标值,如图3.3-24c所示。
②圆弧:以圆弧的起点为坐标原点,用±X、±Y表示圆弧终点相对起点的坐标值,I、J则表示圆心对起点的坐标值,如图3.3-24d所示。
编程中具体采用哪种坐标方式,原则上都是可以的,具体应视编程的方便程度来选择,一般与加工零件图样的尺寸标注法有关。
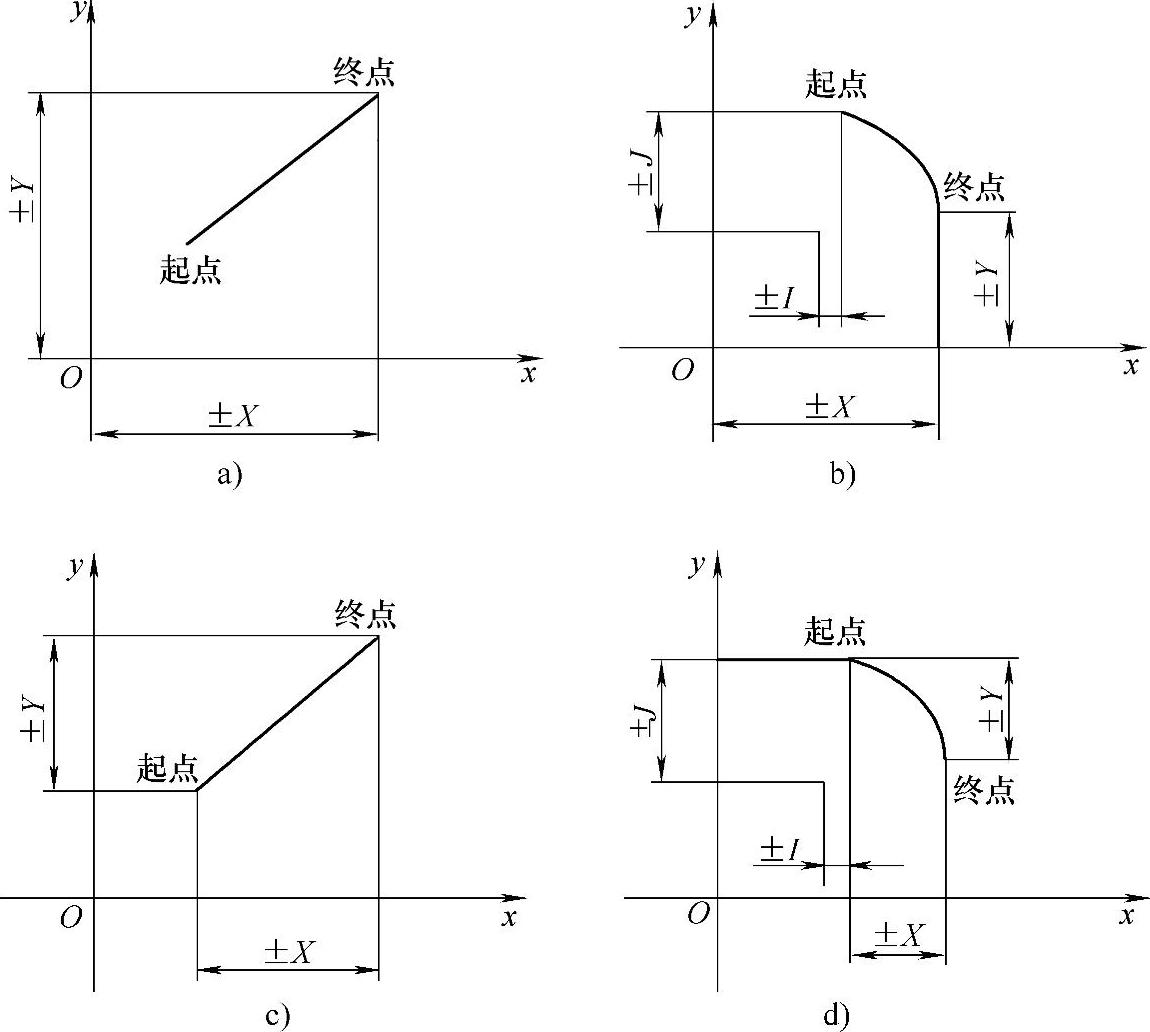
图3.3-24 ISO代码的绝对和相对坐标表达方式
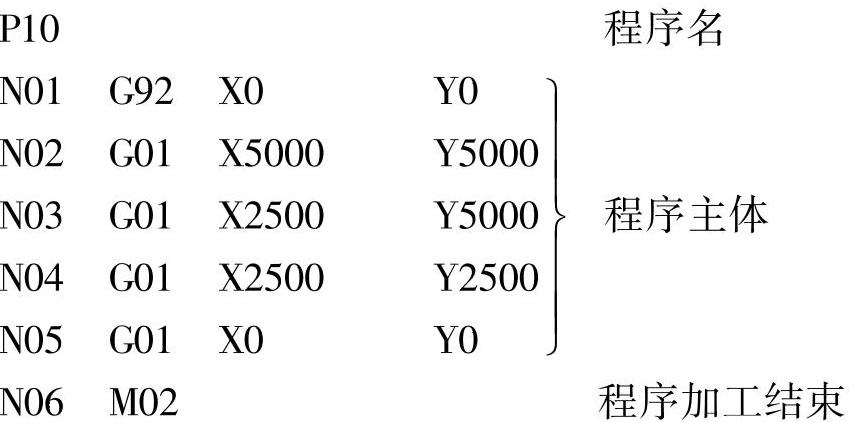
(3)ISO代码编程实例 一个完整的加工程序是由程序名、程序的主体(若干程序段)、程序结束指令组成的,如:
例如,要加工如图3.3-25所示的型腔孔(凹模),穿丝孔中心的坐标为(5,20),按顺时针方向切割。
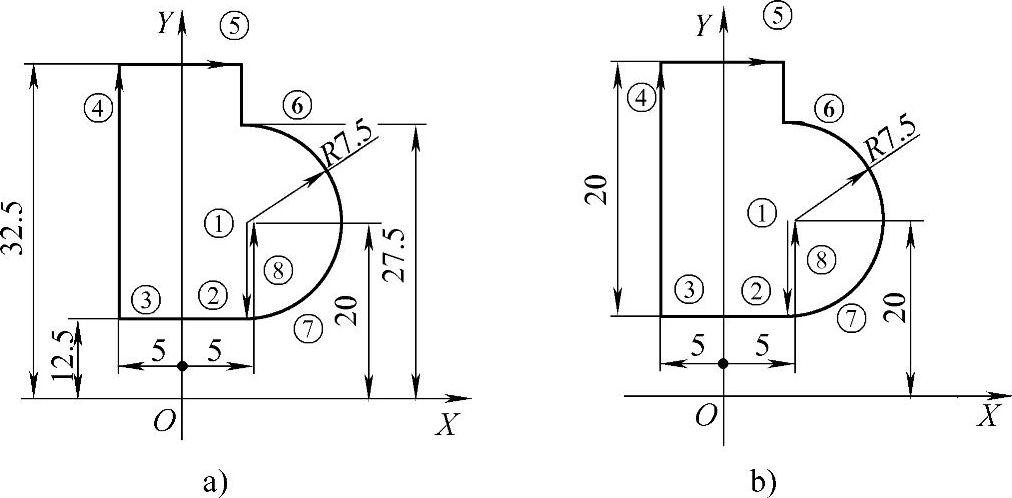
图3.3-25 ISO代码编码举例
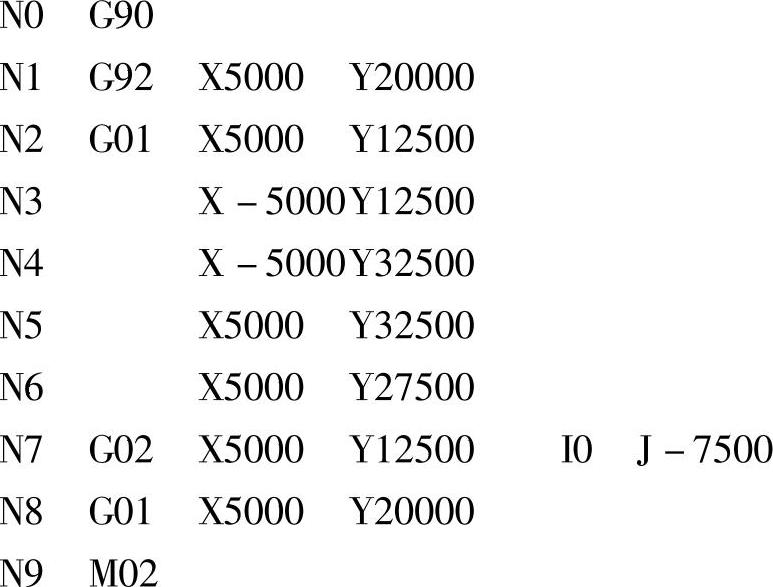
1)以G90绝对坐标方式(见图3.3-25a)编写,程序如下:
2)以G91相对坐标方式(见图3.3-24b)编写,程序如下:
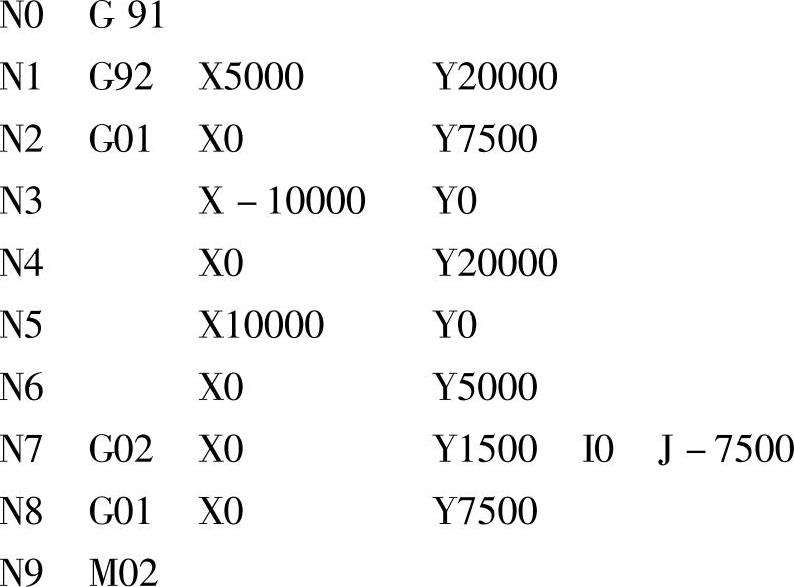
从上面的例子可以看出,采用相对坐标方式输入程序、数据可简单,但要事先算出各个点的相对坐标值。
3.计算机自动编程方法
随着计算机技术的飞速发展,计算机自动编程也发展很快,先后经历了数控语言式输入方式、人机对话式输入方式、CAD/CAM图形编程方式三个阶段。
自动编程的工作过程是根据加工工件图样输入工件图形及尺寸,通过计算机自动编程软件处理转换成线切割控制系统所需要的加工代码程序(如3B或ISO代码等),工件图形可在CRT屏幕上显示,也可打印出程序清单和图形,或将加工代码拷贝到磁盘,或将程序通过编程计算机用通信方式传输给线切割控制系统。
代码传输与后置处理功能就是结合特定机床,把计算机自动编程软件生成的加工代码输入机床控制器用于加工,这是自动编程的最终目的。下面介绍几种线切割加工代码的传输及其相关的后置处理功能。
(1)应答传输 应答传输的功能是将生成的3B加工代码,以模拟电报头读纸带的方式传输给机床控制系统。其接线方式如图3.3-26所示。
编程系统首先检测机床控制机发出的信号波形,如果控制机正处在读入纸带的状态,编程系统确认控制机发出的信号正确,即可正式开始传输文件代码;如果机床的接收信号(读纸带)已经发出,而编程系统总处于检测机床信号的状态,不进行传输,则说明计算机无法识别机床信号。如果传输过程中出错,系统将停止传输。应答传输方式简单,但由于电缆或电源的干扰很容易出错。
(2)同步传输 同步传输的功能是模拟光电头的方式,将生成的加工代码快速同步传输给机床控制系统。其接线方式如图3.3-27所示。
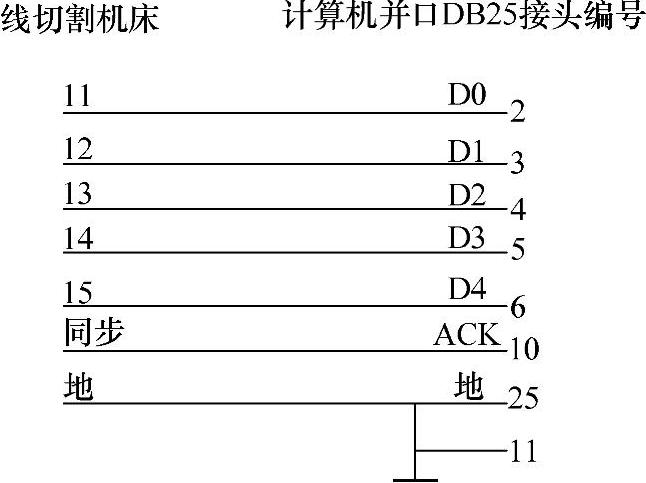
图3.3-26 应答传输接线方式
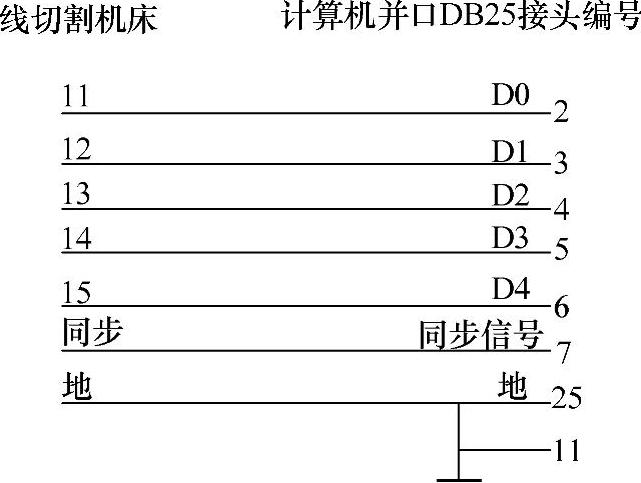
图3.3-27 同步传输接线方式
同步传输不需机床的应答信号。而是同步信号与要传输的加工代码一同传给机床。
(3)串口通信 串口通信传输是利用计算机的串口将生成的加工代码快速传输给机床控制系统的。例如CAXA-WEDM编程软件,其串口传输的具体操作如下:
1)选择串口传输按钮,在串口传输对话框中输入串口传输参数,这些参数包括波频率、奇偶校核、数据位、停止位数、端口、反馈字符、握手方式、后置代码、代码的十进制形式、字符形式、换行符等。
2)输入上述参数后,选择传输文件名后确定,即可开始传输。
3)停止传输后,按任意键结束命令。
(4)网卡通信 网卡通信既快速又准确,传输距离长,是实现长距离通信的好方法。编程用计算机可以离控制机有较远的距离,可实现一机编程多机操作的目的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。