



2.6.2.1 电火花成形加工的基本工艺技术
电火花成形加工的基本工艺技术包括电极与工件的准备,电极与工件的装夹定位,冲抽油方式的选择,加工规准的选择与转换,电极缩放量的确定及平动(摇动)量的分配等,现分述如下。
1.电极的准备
(1)电极材料的选择 根据电火花加工的特点,对电极材料的要求如下:
1)必须是导电材料,具有良好的电火花加工性能。电极损耗要小,加工速度要高,无论是在粗加工大电流,还是精加工小电流时均能稳定加工。
2)机械加工性能好,易于加工制造成形。
3)来源丰富、价格便宜。
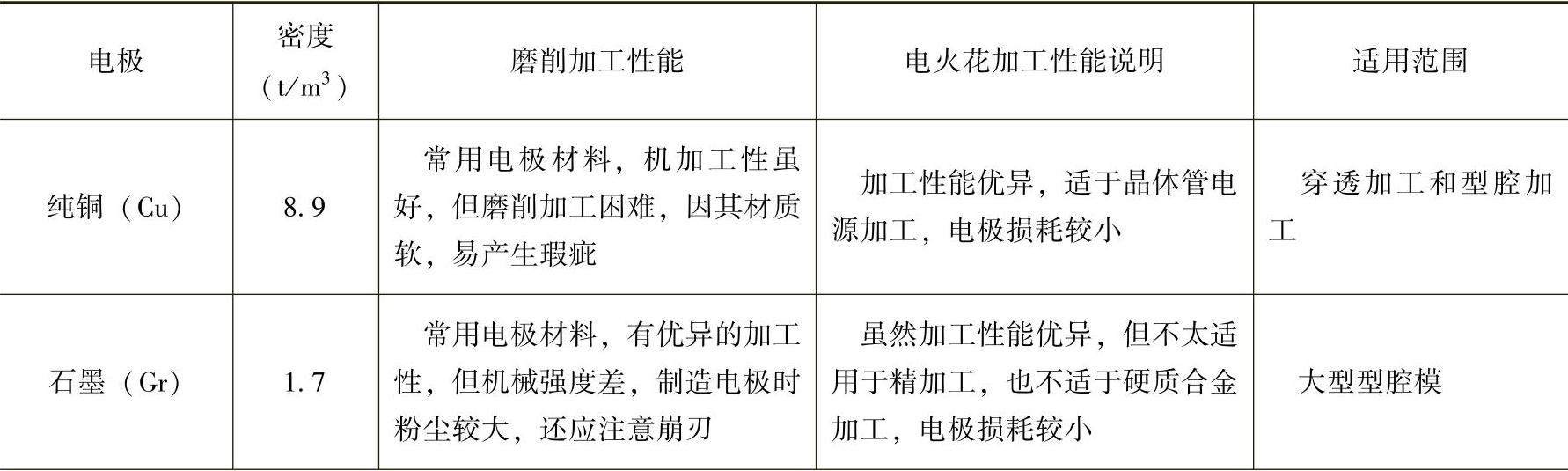
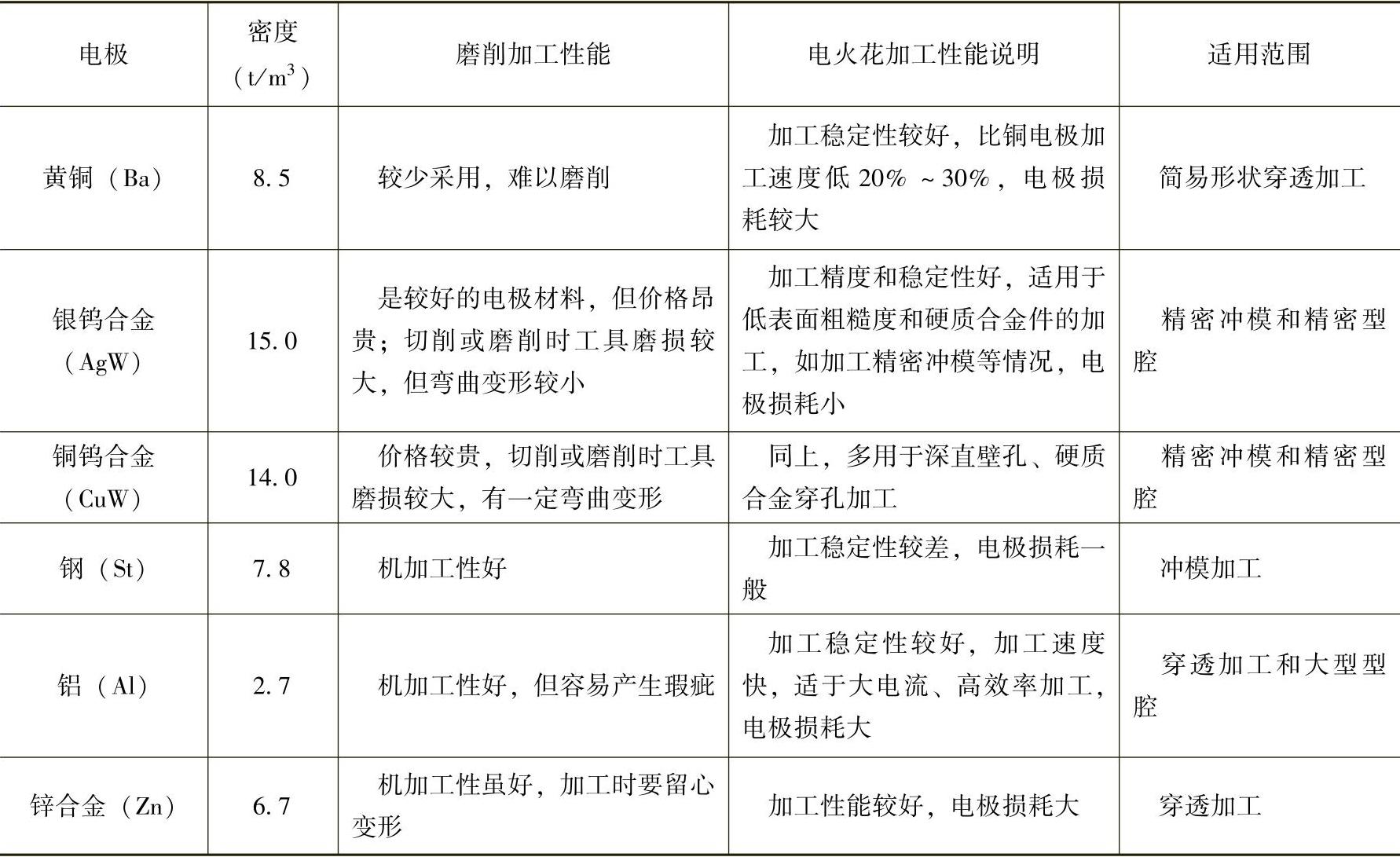
表2.6-2列举了常用电极材料的各种性能对比。
表2.6-2 常用电极材料的各种性能对比
(续)
(2)电极的设计
1)型腔模的电极设计
① 电极结构形式的确定。电极结构形式有整体式、镶拼式和组合式三种类型。
整体式电极适用于尺寸大小和复杂程度一般的型腔模的加工,它又分为有电极固定板和无电极固定板两种形式。无固定板式多用于型腔尺寸较小、形状简单、只用单孔冲油或排气的情况。有固定板式用于型腔尺寸稍大、形状较复杂、采用多孔冲油或排气的情况。
镶拼式电极适用于型腔尺寸较大、单块电极坯料尺寸不够,或型腔形状复杂、电极易分块制作的情况。
组合式电极适用于一模多腔的情况,可简化各型腔间的定位工序,提高定位精度。
② 电极尺寸的确定。斜壁型腔在半精、精加工时,仅需垂直进给就可修光型腔,相应电极尺寸的确定较容易。对于直壁型腔,由于粗加工的放电间隙较大,在转换规准进行半精、精加工时需使电极作平动/摇动修光侧面。因此,电极必须缩小或放大一定尺寸。电极尺寸确定的方法如下:
·水平尺寸的计算。与主轴进给方向垂直的电极尺寸称为水平尺寸,如图2.6-4a所示。计算时应考虑放电间隙和电极缩放量,用式(2.6-2)确定:
a=A±Kδ (2.6-2)
式中,a为电极水平方向的尺寸(mm);A为型腔图样的名义尺寸(mm);δ为电极的单面缩放量(mm);K为与型腔尺寸注法有关的系数。
式(2.6-2)中的±号按下述原则决定:对型腔凸出部分,其相对应的电极凹入部分的尺寸应放大,用+号;反之,对凹入部分,电极凸出部分的尺寸应缩小,用-号。
式(2.6-2)中K值按下述原则选取:当图中尺寸线均注在边界上时,K=2;一端以中心线或非边界线为基准时,K=1;各中心线之间的位置尺寸,以及角度数值,电极上相对应的尺寸不缩不放,K=0。式(2.6-2)中电极单面缩放量δ的确定方法将在后面详细介绍。
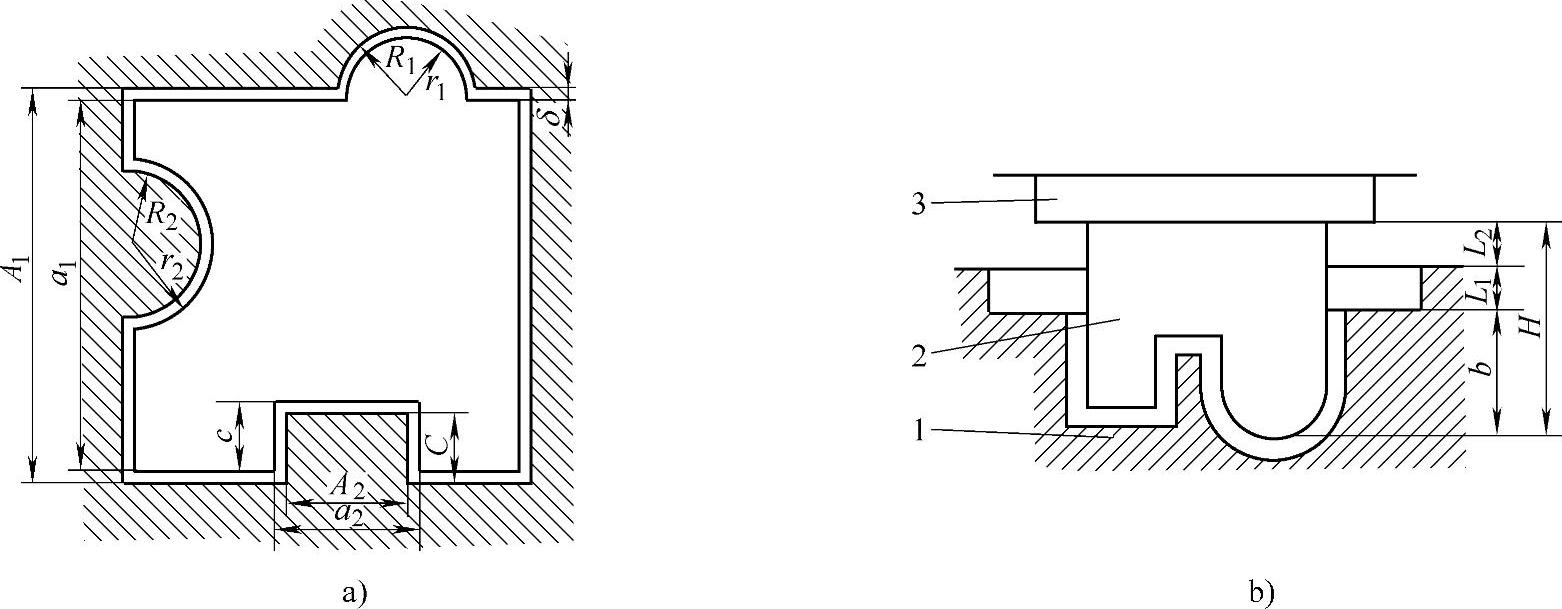
图2.6-4 电极尺寸设计
a)水平尺寸缩放说明图 b)总高度尺寸说明图
1—工件 2—电极 3—夹具
· 垂直方向尺寸计算。与主轴进给方向平行的电极尺寸称为垂直尺寸。用式(2.6-3)确定:
b=B±Δ′ (2.6-3)
式中,b为电极垂直方向的有效加工尺寸(mm);B为型腔深度方向的尺寸(mm);Δ′为放电间隙与电极损耗要求电极端面的修正量之和(mm)。
上述电极垂直尺寸的确定,未考虑型腔底面的抛光量。一般情况下抛光量很小,可忽略不计。
·电极总高度的确定。电极在垂直方向总高度H(见图2.6-4b)必须考虑电火花加工的工艺需要、同一电极使用的次数、装夹要求等因素,用式(2.6-4)确定:
H=b+L1+L2 (2.6-4)
式中,H为除装夹部分以外的电极总高度(mm);L1为当需加工的型腔位于另一型腔中时,电极需要增加的高度(mm);L2为在加工结束时,电极夹具或固定板不与模块发生碰撞的高度(mm)。
在设计电极时,还可根据使用不同规准的放电间隙和对加工中各阶段的损耗预测,来确定电极各部位的尺寸、形状。在电火花加工中,工具电极尺寸和形状千变万化,工具电极各部分投入加工放电的顺序有先有后,工具电极上各点的总加工时间和损耗也不相同。因此,应定量预测各部分的损耗值,将其作为修正值来设计电极的尺寸。图2.6-5所示为经过损耗预测后,对工具电极尺寸和形状进行补偿修正的示意图。图中的实线为工具电极的理论形状、尺寸(即加工后的形状、尺寸);虚线是工具电极经补偿修正的形状、尺寸(即加工前的形状、尺寸)。
2)冲模的电极设计
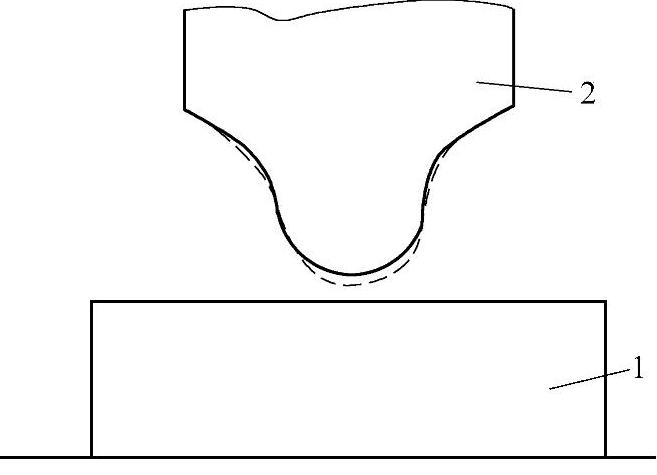
图2.6-5 根据对工具电极损耗的预测,对其尺寸和形状进行补偿
1—工件 2—工具电极
① 电极结构形式的选择。与型腔模电极一样,冲模的电极也有整体式、镶拼式和组合式三种类型。在应用中,应根据模具类型、型孔尺寸大小、电极装夹形式和经济效果来选定。
整体式电极(见图2.6-6a)是最常用的结构形式。对于较大体积的电极,为了减轻质量避免主轴负载过大,可在端面开孔或挖空。对小体积、易变形的电极,可在有效长度上部,将截面尺寸增大。
镶拼式电极(见图2.6-6b)一般在机械加工有困难时采用,如在磨削时不能深入到底部,完成清根、清角,而采用几块分开制造后镶拼的方法等。有时也因整体式电极不能保证制造精度,而采用镶拼电极结构。
组合式电极(见图2.6-6c)是将多个电极组合在一起,用于一次加工多孔落料模、级进模和在同一凹模上的若干个型孔。用组合电极加工,只要垫块尺寸精确,组合时保证各电极间的平行度,装卡牢固,就可加工出精度较高的凹模。
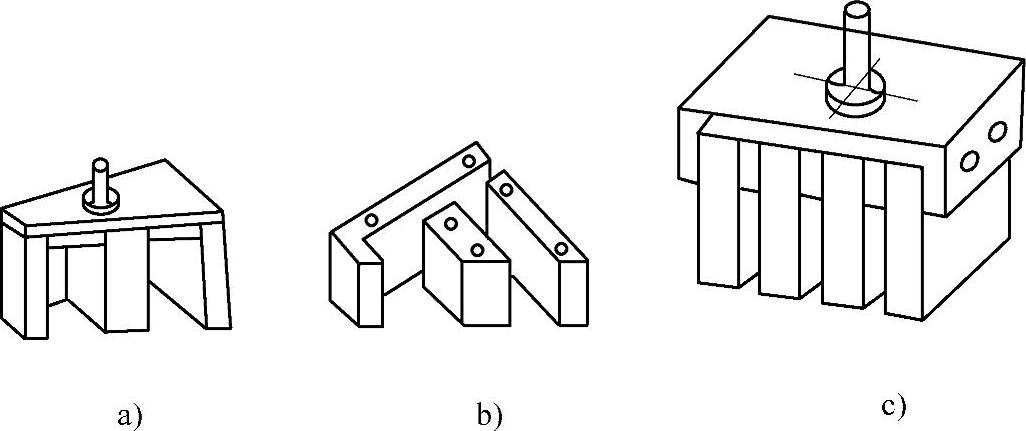
图2.6-6 电极结构形式示意图
a)整体式 b)镶拼式 c)组合式
② 电极长度的确定。电极的长度取决于模具的结构形式、加工深度、电极材料、型孔的复杂程度、装夹形式、使用次数和电极制造工艺等一系列因素。图2.6-7所示为电极长度计算说明图,它的估算公式如下:
L=KH+H1+H2 (2.6-5)
式中,L为所需电极的长度(mm);H为凹模有效加工厚度(mm);H1为一些模板后部挖空时,电极所需加长的部分(mm);H2为一些较小电极端部不宜制作螺孔,而必须用夹具夹持电极尾部时,需要增加的夹持长度(mm);K为与电极材料、加工方式、型孔复杂程度等因素有关的系数,损耗小的电极材料、型孔较简单、电极轮廓尖角较少时,K取小值;反之,取大值。K值选取的经验数据如下:石墨(1.7~2)、纯铜(2~2.5)、黄铜(3~3.5)、钢(3~3.5)。若电极多次使用,则每多用一次,电极的长度一般需增加(0.4~0.8)H。
若加工硬质合金时,由于电极损耗较大,电极还要加长,加长部分等于凹模的加工深度。
③ 电极截面尺寸的确定。与型腔模水平尺寸的计算方法相同,只是将公式(2.6-2)中的δ改为单面放电间隙S即可。也就是说,在设计电极时,电极轮廓尺寸要比预定型孔尺寸均匀地缩小或放大一个放电间隙,可用式(2.6-6)来确定:
a=A±KS(2.6-6)
若按凸模尺寸和公差确定电极截面尺寸,则随着凸、凹模配合间隙不同分为三种情况:
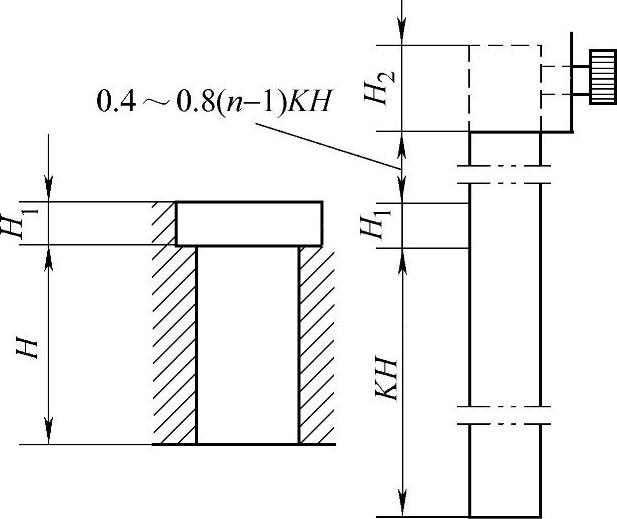
图2.6-7 电极长度计算说明图
·配合间隙等于电火花放电间隙时,电极截面尺寸和凸模截面尺寸完全相同。
·配合间隙大于电火花放电间隙时,电极截面尺寸应大于凸模截面尺寸,即每边均匀放大一个数值,但形状相似。
·配合间隙小于电火花加工间隙时,电极截面尺寸小于凸模截面尺寸,即每边均匀缩小一个数值,但形状相似。
电极每边放大或缩小的数值,可用式(2.6-7)计算:

式中,a1为电极单边放大或缩小量(mm);δp为凸、凹模配合间隙(mm)。
(3)排气孔和冲/抽油孔的设计 型腔加工一般都是不通孔加工,因此排气、排屑是影响加工状态的稳定和表面粗糙度值的重要因素。电极上排气孔及冲/抽油孔的大小和位置,直接关系到加工时排气排屑的效果。
一般情况下,冲/抽油孔要设计在难于排屑的位置,如拐角、窄缝等处。排气孔要设计在蚀除面积较大的位置和电极端部有凹入的位置,如图2.6-8a、图2.6-8d所示。因为前者气体外逸路程太长,而后者气体易于积聚。
冲/抽油孔和排气孔的直径,应不大于缩放量的两倍,一般设计为ϕ1~ϕ2mm。过大了则在加工后残留的“小柱”太大,不易清除。为了利于排气排屑,在尺寸允许的条件下,要把冲/抽油孔、排气孔上端加大孔径为ϕ5~ϕ8mm,如图2.6-8b和图2.6-8c所示。
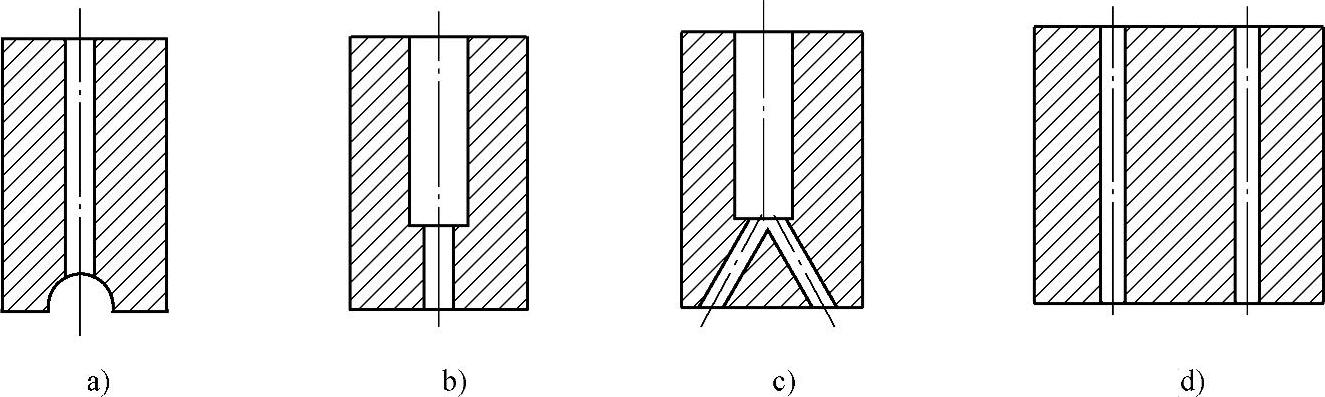
图2.6-8 孔的位置和孔形示意图
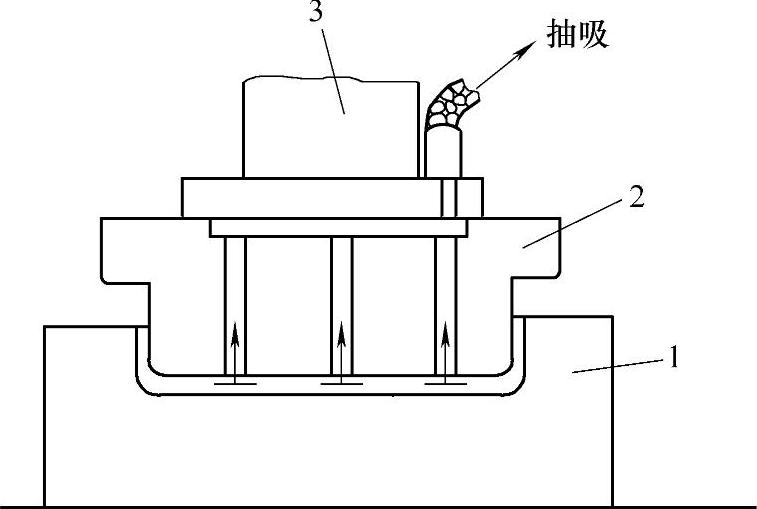
图2.6-9 电极多抽油孔示意图
1—工件 2—石墨电极 3—法兰盘
冲/抽油孔和排气孔的数量,一般以蚀除产物不产生堆积为宜。各孔间距离为20~40mm。有时冲/抽油孔的位置要适当错开,以减少波纹的形成。冲/抽油孔也可开成ϕ0.5~ϕ1.5mm的组孔,如图2.6-9所示。这样在平动/摇动加工时可把冲/抽油孔中形成的“柱子”去掉。加工深型腔时,也可采用部分孔冲油、部分孔排气的方法,这样排屑效果更好。对有通孔或型腔下面有工艺孔的型腔加工,可用油杯作下冲油或下抽油,电极不设计冲/抽油孔,但仍需排气孔,这样加工稳定、效率高。
(4)电极的制造 制造电极的方法有多种,主要是根据所选用的材料种类、模具种类、模具的精度和数量来决定的。电极制造方法与应用范围见表2.6-3。
表2.6-3 电极制造方法与应用范围
(续)
表2.6-4 电铸电极制造方法与应用范围
图2.6-10 大型电铸电极加工的微型轿车车轮防泥罩塑料模
常用模具钢材料见表2.6-5、表2.6-6和表2.6-7。
表2.6-5 冷作模具钢
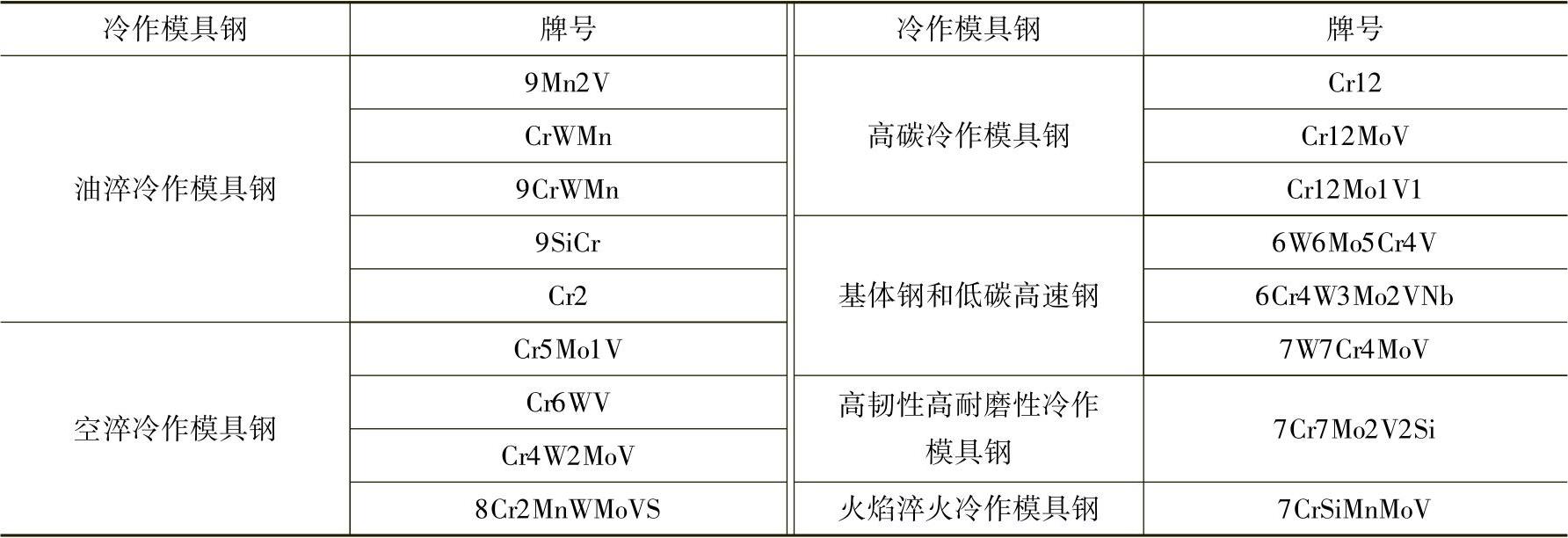
表2.6-6 热作模具钢
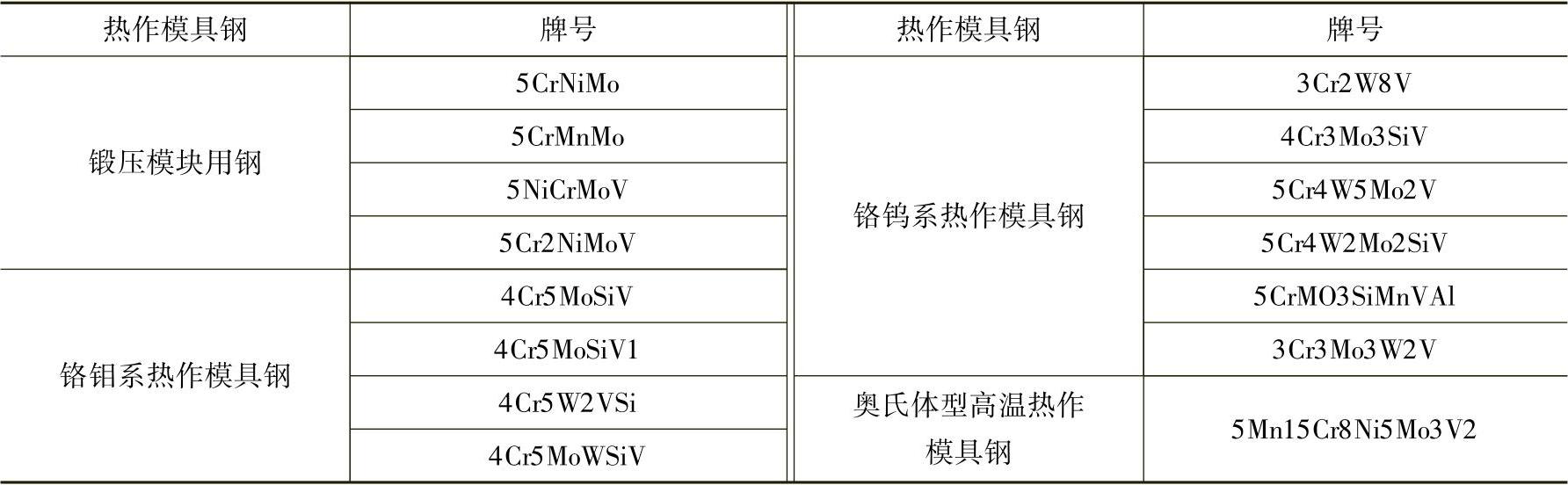
表2.6-7 塑料模具钢

2.工件的准备
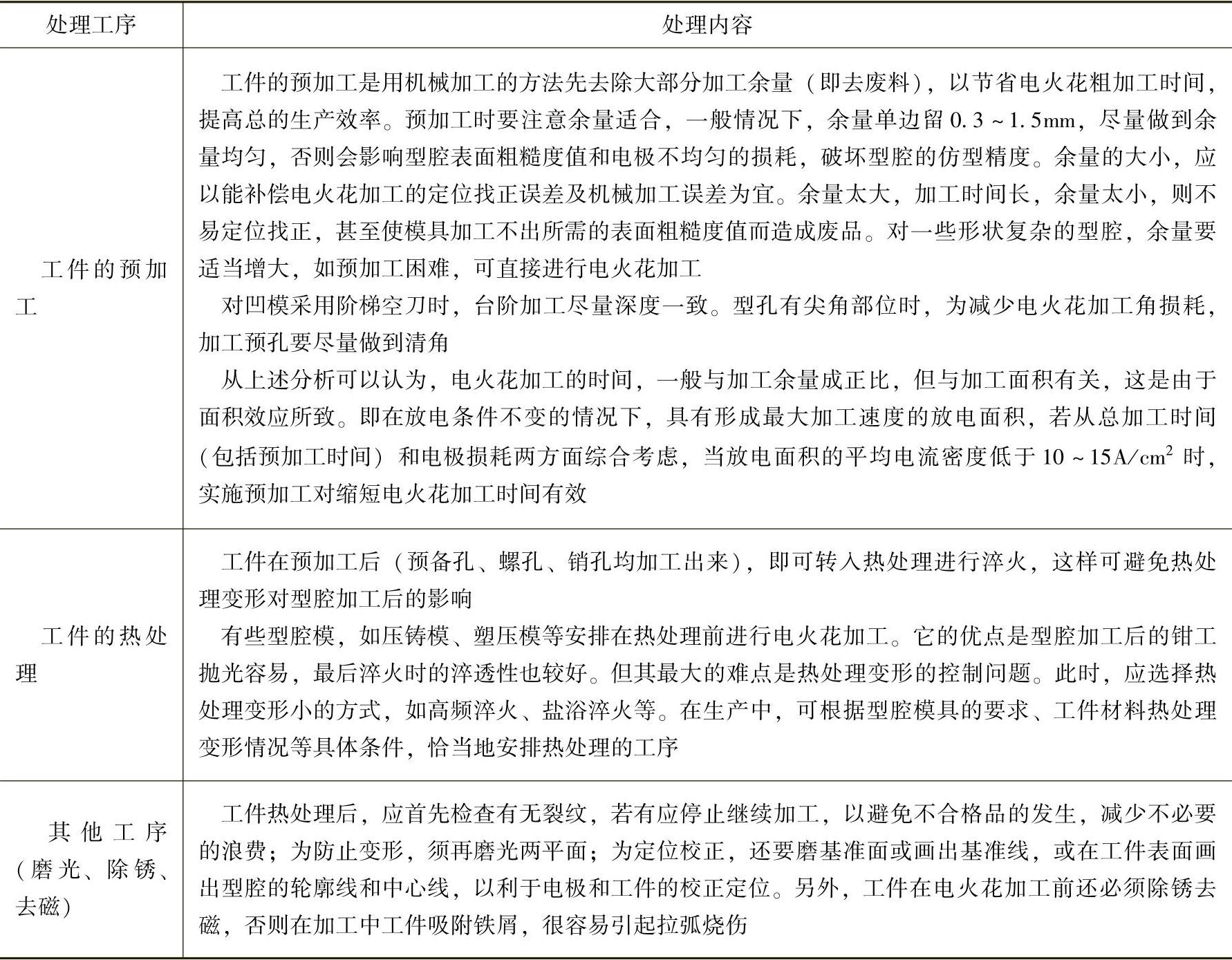
工件的准备主要考虑工件的预加工和热处理工序的安排,见表2.6-8。
表2.6-8 工件的准备工作
3.电极与工件的装夹定位
电极和工件在电火花加工前,必须借助通用或专用的工装夹具及测量仪器进行装夹和校正定位。电极和工件装夹定位的质量,直接影响加工过程的稳定性和整个模具的加工精度。
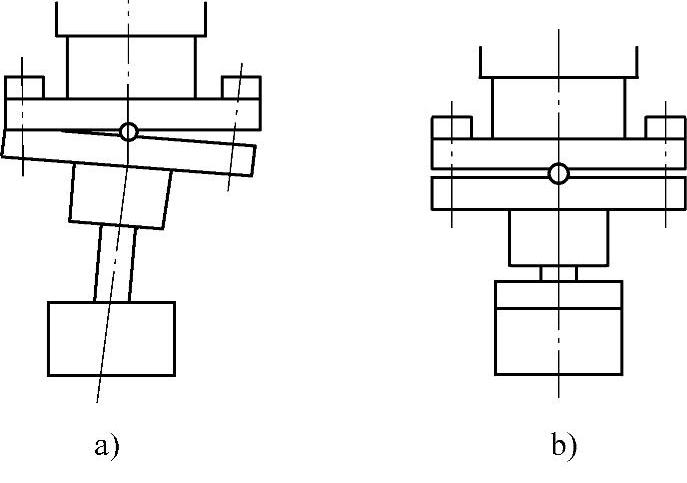
图2.6-11 用螺钉紧固
a)不正确的装夹方式 b)正确的装夹方式
(1)电极的装夹与校正 电极装夹与校正的目的,是把电极牢固地装夹在主轴的电极夹具上,并使电极轴线与主轴进给轴线一致,保证电极与工件的相对位置。
装夹电极时应注意以下事项:
1)电极与夹具的安装面必须清洗或擦拭干净,保证接触良好。
2)用螺钉紧固时,用力要适当,避免用力过大使电极变形或用力过小装夹不牢,使电极在加工中不产生任何松动,并尽量将电极夹正,防止垂直度误差太大。图2.6-11所示为最常用的装夹方式,即借助于四只螺钉进行紧固的通用夹具,但一旦四只螺钉紧固力不均衡,便容易产生加工变位,如图2.6-11a所示。图2.6-12所示为小型电极的装夹实例,但如仅用一只螺钉紧固,则极易产生松动,如图2.6-12a所示。正确的方法是,应使螺纹后部带有基准平面,加大与电极的接触面积,并加一弹簧垫圈防止松动,如图2.6-12b所示。
3)对于细长电极,伸出部分的长度在满足加工要求的前提下尽可能短,以提高刚性。
4)石墨是一种脆性材料,因此在紧固时,只需施加金属材料的1/5紧固力就足够了。若电极为薄板时,还可用导电性粘接剂进行粘接。
5)对于大型电极,夹具的刚度是极为重要的,否则将造成不必要的精度误差和加工效率的降低。当电极质量超过15kg时,应采用固定板型夹具。
电极常用的校正方法见表2.6-9。
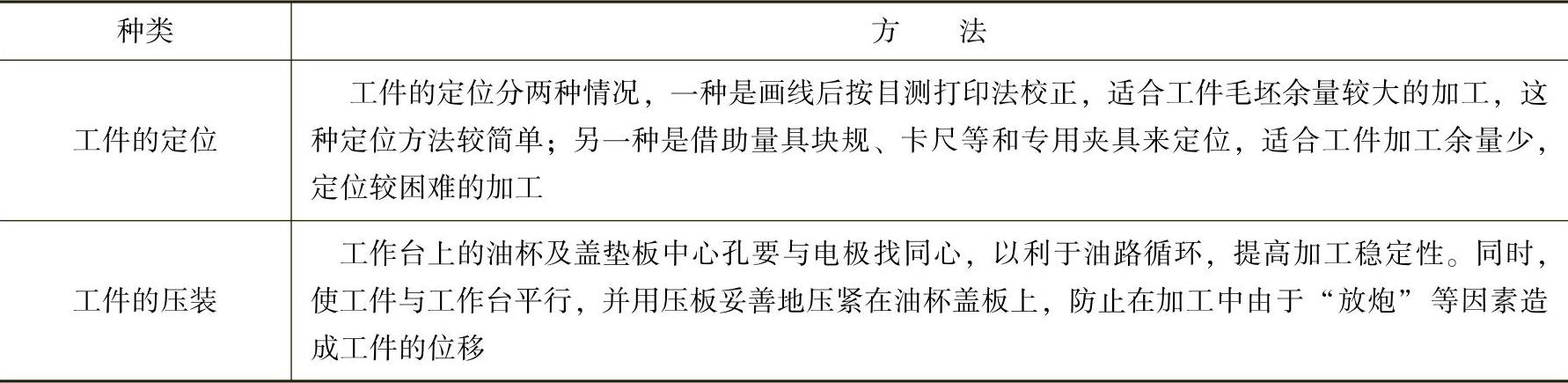
(2)工件的装夹与定位 一般情况下,工件可直接装夹在垫块或工作台面上。采用下冲油时,工件可装夹在油杯上,通过压板压紧。工作台有坐标移动时,应使工件基准线与拖板一轴移动方向一致,便于电极和工件间的校正定位。工件的定位与压装见表2.6-10。
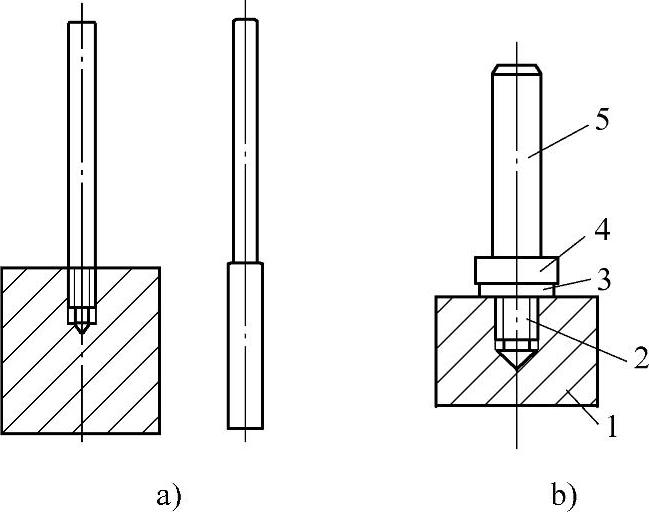
图2.6-12 用带柄的螺纹紧固
a)不正确的紧固方式 b)正确的紧固方式
1—电极 2—螺纹 3—垫圈 4—座 5—柄
表2.6-9 电极常用的校正方法
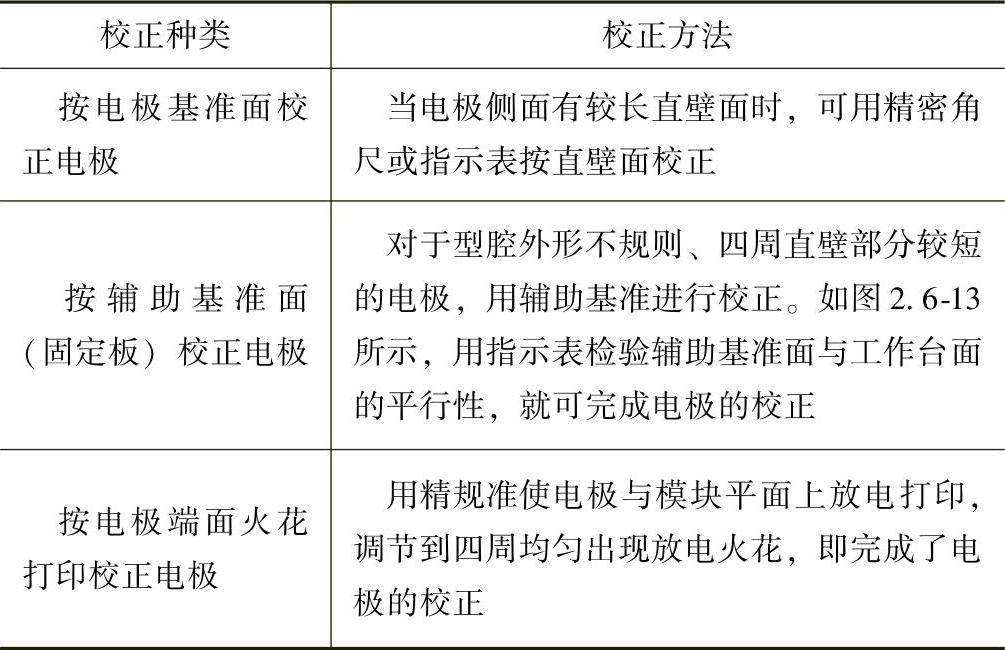
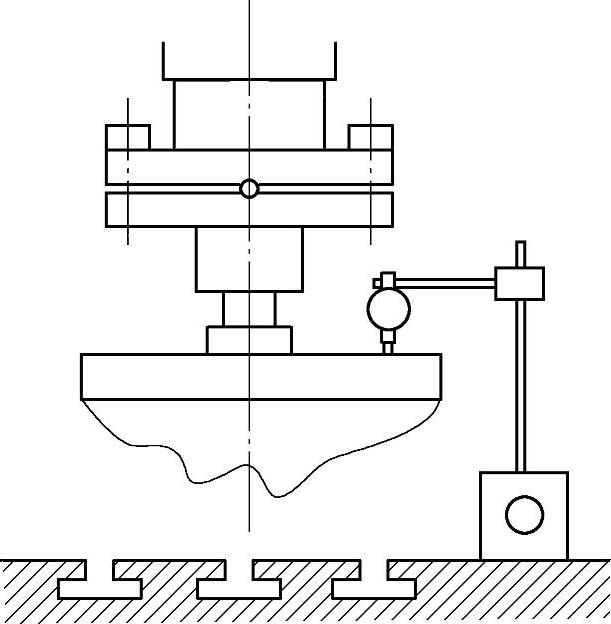
图2.6-13 按辅助基准面校正型腔模电极
表2.6-10 工件的定位与压装
(3)电极与工件相对位置的校正 为确定电极与工件之间的相对位置,可采用的校正方法见表2.6-11。
表2.6-11 电极与工件相对位置的校正

在采用组合电极加工时,其与工件的校正方法和单电极一样,但应注意在位置确定后,使每个预备孔都要加工上。
4.加工规准的选择、转换,单面缩放量的确定及摇动(平动)量的分配
在加工模具或零件时,无论使用何种机床,首先要满足图样的尺寸精度、表面粗糙度值的要求,同时还要有较高的加工速度。因此,确定加工规准、设计电极尺寸的缩放量以及规准转换和摇动量(平动)的分配是非常重要的,三者密不可分,必须同时考虑。目前,各生产厂都为用户提供了加工参数表和对应的加工结果,并作成数据库存储在机器中,为实用计算提供了依据。
(1)加工规准的选择、转换与单面缩放量的确定 选择加工规准时应考虑以下因素:
1)加工速度、表面粗糙度值、电极损耗比、加工余量之间的关系。
2)电极损耗比与损耗值的差异(一般为端面损耗比)。
3)当表面粗糙度值减小到原值的 时,加工速度降低到原来的五分之一以下,因此必须选择适当的加工规准,方法见表2.6-12。
时,加工速度降低到原来的五分之一以下,因此必须选择适当的加工规准,方法见表2.6-12。
表2.6-12 加工规准选择方法
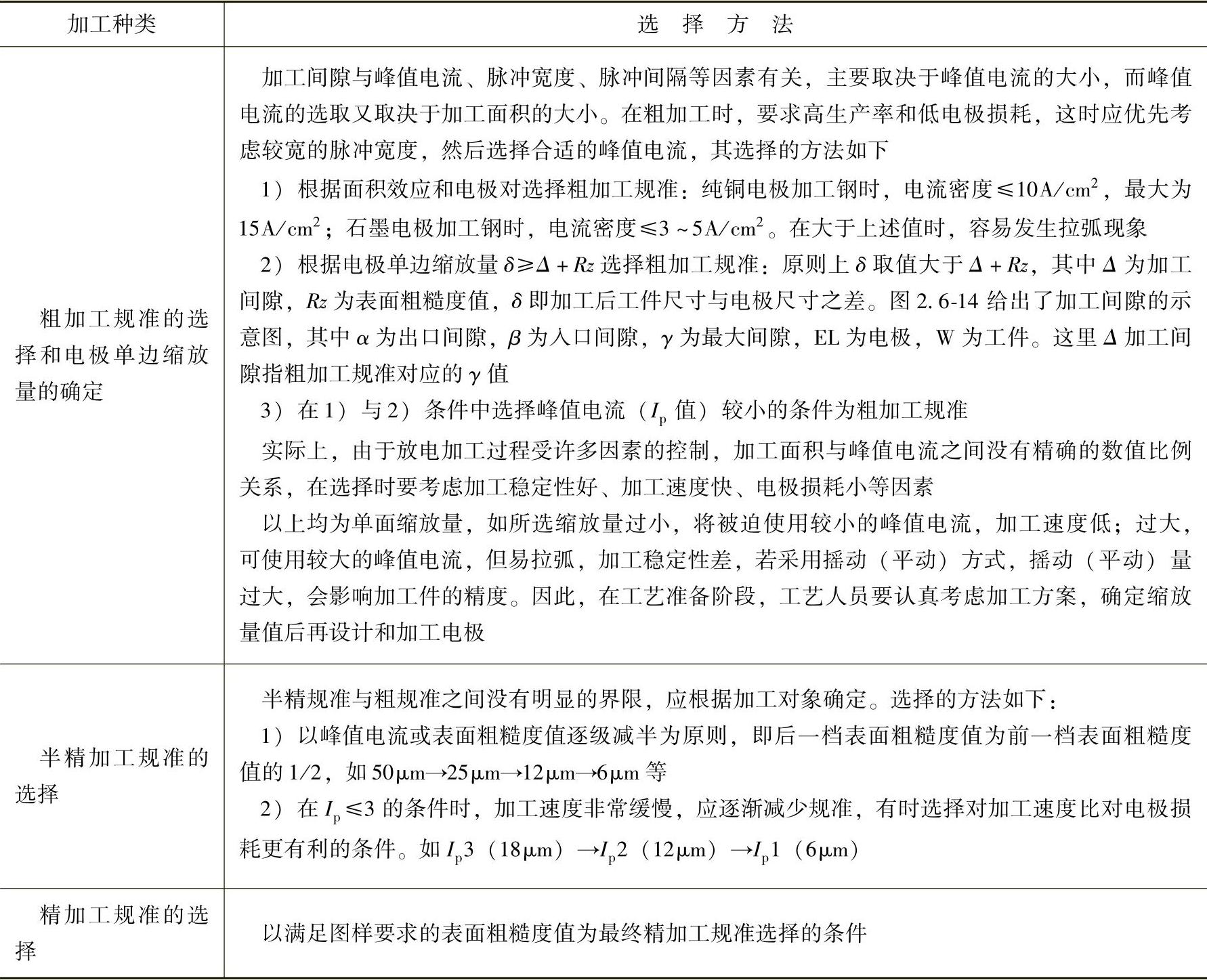
(2)加工进给量和摇动(平动)量的确定 单面缩放量确定后,粗加工规准也就确定了,根据最终加工要求,按峰值电流或表面粗糙度值逐级减半的原则,将整个加工过程分为粗、半精、精三个阶段,若干加工条件来完成。由于加工过程中,加工能量逐渐减小,加工间隙也相应越来越小,要使侧面和底面同步加工,就要靠加工深度的进给量和摇动(平动)量来补偿间隙,下面介绍其确定的具体方法。
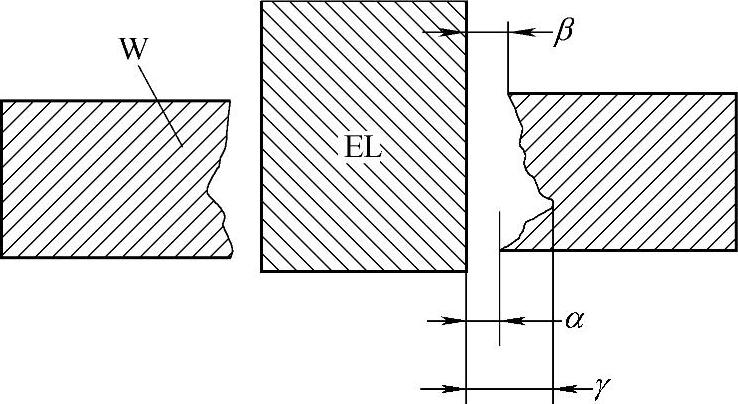
图2.6-14 加工间隙的示意图
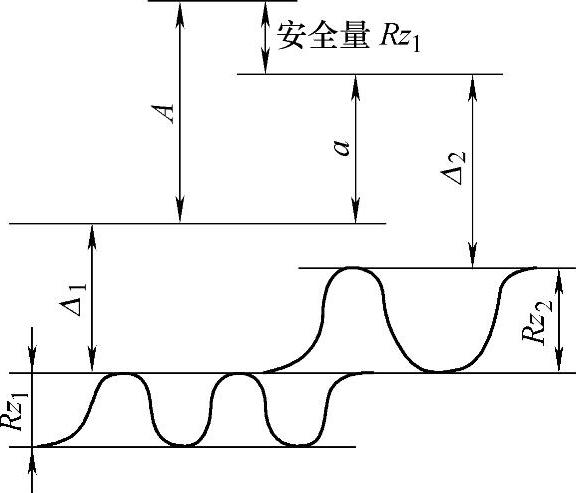
图2.6-15 相邻两规准加工间隙与进给量的关系
1)加工进给量的确定。图2.6-15给出了相邻两规准加工间隙与进给量的关系图。其中A为底面进给量的实际值,a为底面进给量的计算值,Δ1为下一规准加工间隙,Δ2为上一规准加工间隙,Rz1为下一规准加工表面粗糙度值,Rz2为上一规准加工表面粗糙度值。由图可知,其加工进给量的计算公式为:
A=Δ2+Rz2-Δ1+Rz1 (2.6-8)
计算时,Δ2在第一档加工规准时取β,以后各档加工规准时取上一挡加工规准的Δ1(μm);Δ1为下一档加工规准α与β之和的一半,即Δ1=(α+β)/2(μm);α、β、γ、Rz可在加工条件数据表中查找。
若由多档规准进行加工(如4挡),其相邻两规准的进给量和这一规准距最终加工底面基准值的关系见图2.6-16,图中C为加工规准,A为底面进给量,Z为距最终加工底面的基准值,1、2、3、4为加工规准顺序。计算方法如下:
各加工规准的进给量:C1与C2为A1,C2与C3为A2,C3与C4为A3,C4与最终加工底面为A4。则各加工规准距最终加工底面的基准值为:
C4加工规准:Z4=A4;
图2.6-16 相邻两规准的进给量及距最终加工底面基准值的关系
C3加工规准:Z3=A3+A4;……(https://www.xing528.com)
依此类推,C1加工规准:Z1=A1+A2+A3+A4。
2)摇动(平动)量的确定。在同一条件下加工时,一般侧面的表面粗糙度值比底面略好,就侧面而言,进给量要比底面进给量小20%~30%。因此,侧面进给量与底面进给量的关系用公式表示为
B=A×(0.7~0.8) (2.6-9)
式中,B为侧面进给量;A为底面进给量。
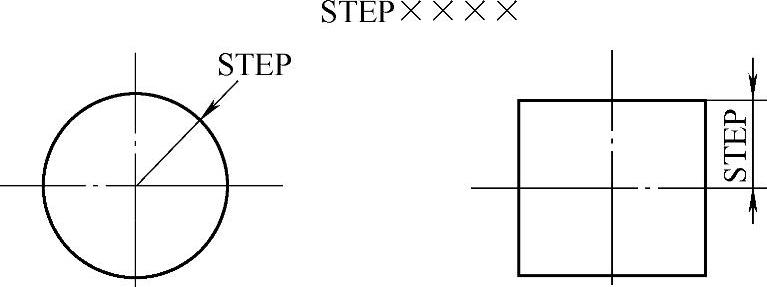
图2.6-17给出了侧面进给量、最终加工基准面与摇动(平动)量的关系。图中S为距最终加工侧面的基准值,δ为电极单面缩放量,STEP为摇动(平动)量,C为加工规准,B为侧面进给量。由图可知每一规准的摇动(平动)量计算公式为:
STEP=δ-S (2.6-10)
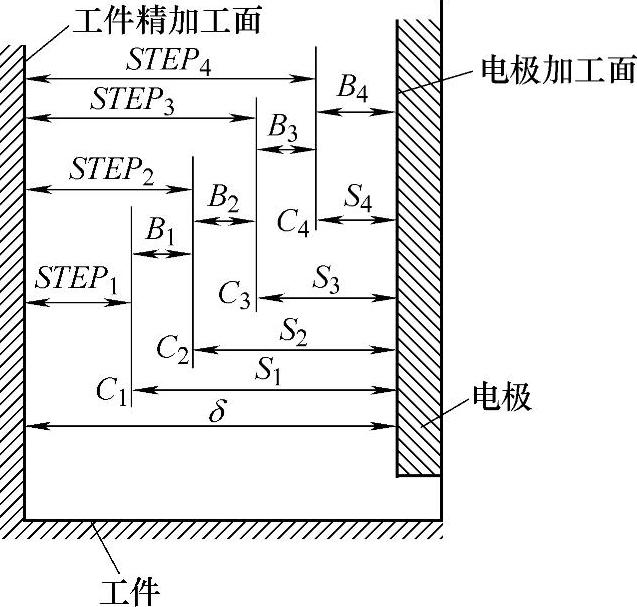
图2.6-17 侧面进给量、最终加工基准面与摇动(平动)量的关系
根据公式(2.6-9)、(2.6-10),各规准的摇动(平动)量计算方法如下:
C4加工规准:S4=B4,STEP4=δ-S4;C3加工规准:S3=B3+B4,STEP3=δ-S3;……
依此类推,C1加工规准:S1=B1+B2+B3+B4,STEP1=δ-S1。
上述计算过程有助于操作者掌握加工规准与进给量的关系,可使用计算机microsoft excel进行编程,以简化计算过程。
(3)加工参数表和参数说明 数控电火花加工机床都随机带有将加工电参数优化组合的加工参数表。这种电参数优化组合是经过大量工艺实验验证的,得出的加工间隙及表面粗糙度等值对工艺人员是非常有意义的,可根据上面的公式,利用给出的数据进行计算。对于使用机械(数控)平动头的机床,可参考数控机床的做法,将常用电参数组合进行工艺试验验证,测出加工间隙和表面粗糙度值,同样可用上面的公式计算。
加工参数表根据电极、工件材料和的电极损耗要求给出了石墨加工钢(Gr-St)、铜加工钢(Cu-St)、铜钨合金加工硬质合金(CuW-WC)、铜钨合金加工纯铜(CuW-Cu)等加工条件组。下面以最常用的铜加工钢低损耗条件组为例,对部分参数组合加以说明,见表2.6-13。
表2.6-13 铜加工钢低损耗规准
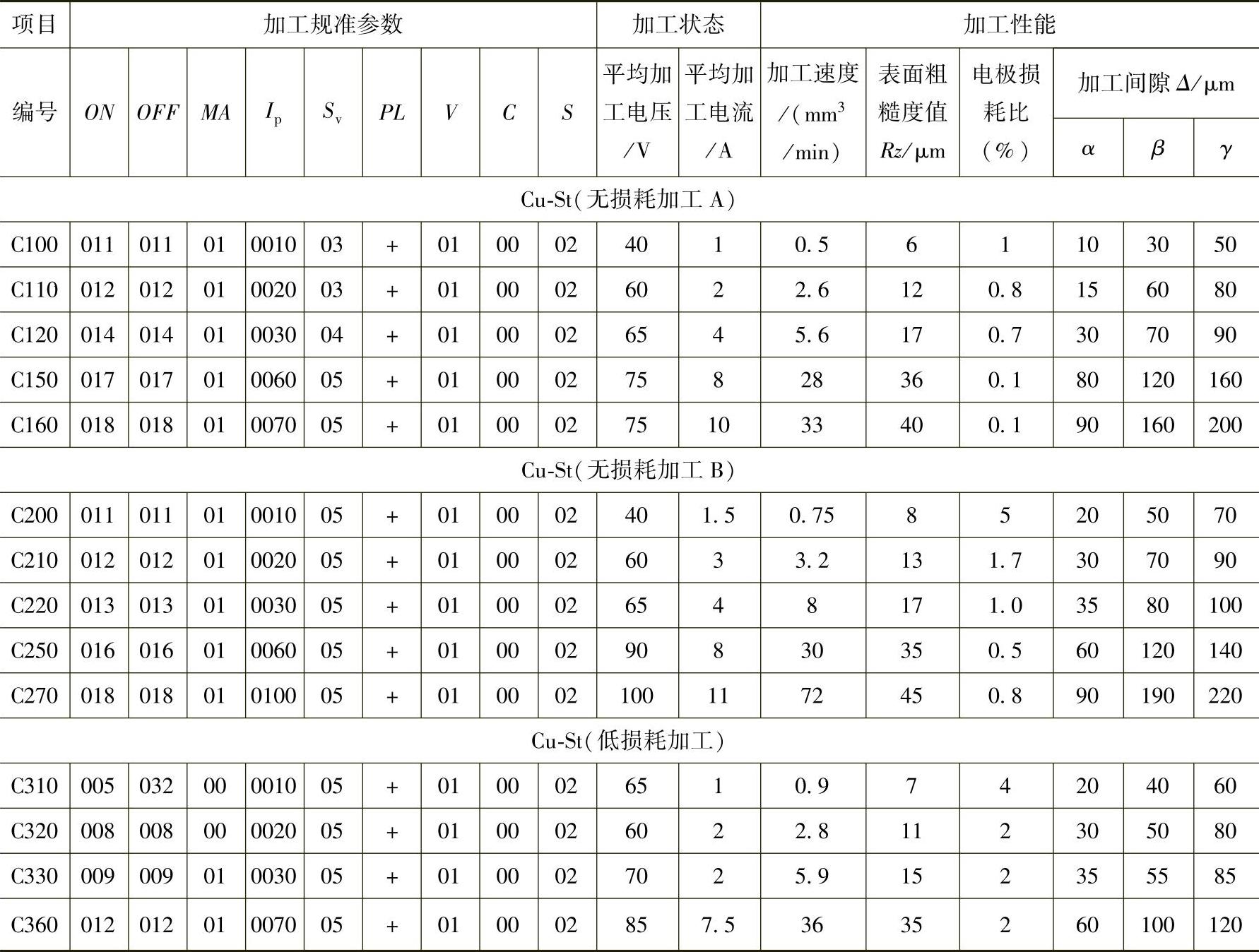
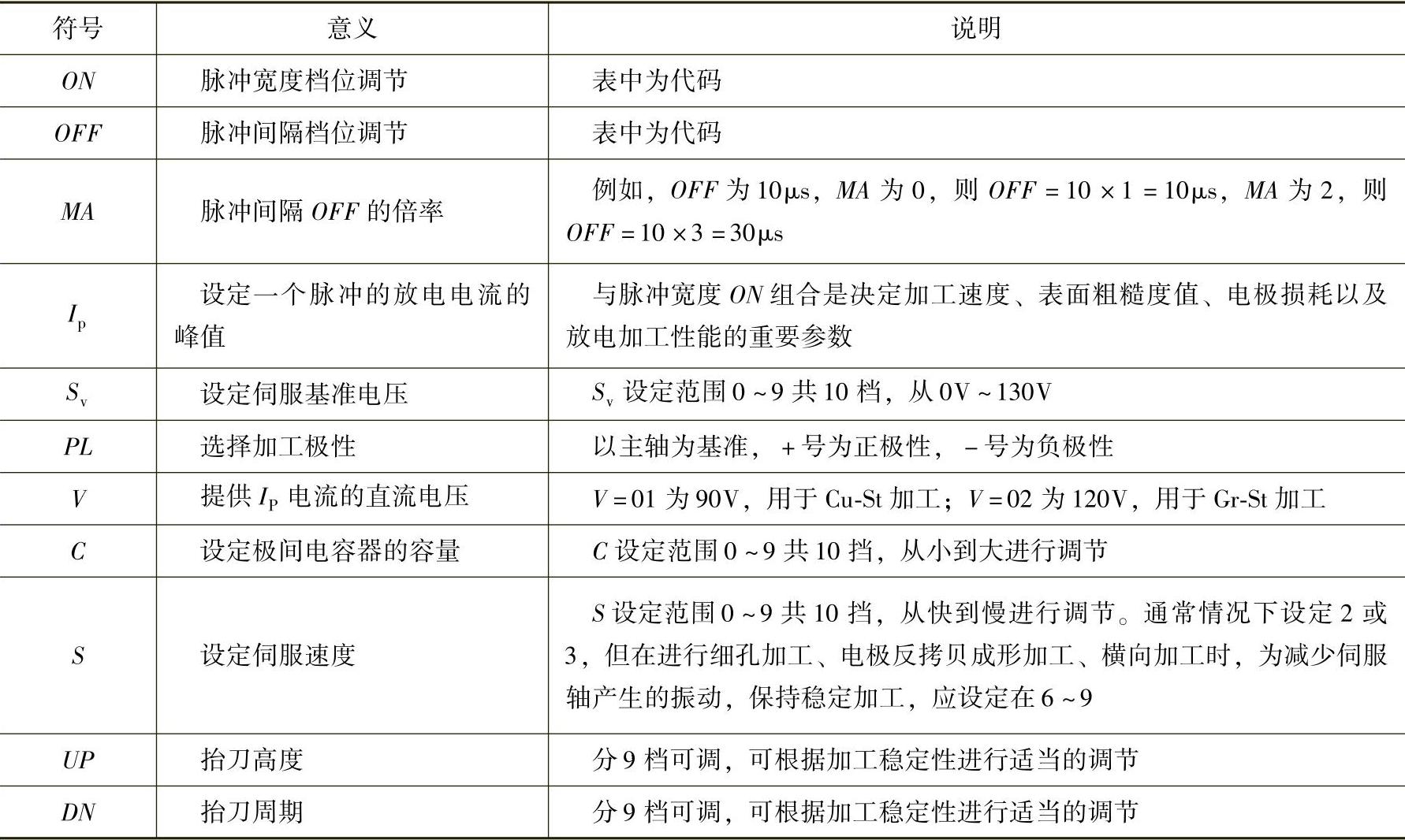
表2.6-13中参数说明,见表2.6-14。
表2.6-14 加工条件解释
(4)计算实例 已知条件:单工具电极摇动加工;电极单面收缩量为0.20mm,电极尺寸为9.00mm;工件的长9.40mm,宽9.40mm,深5.00±0.02mm;表面粗糙度值Rz为6μm;电极-工件为Cu-St。
1)首先根据要求的表面粗糙度值Rz=6μm选择精加工规准。由于不同的加工规准加工后虽然表面粗糙度值一样,但加工速度、电极损耗比不完全一样。由表2.6-13可查到有三种加工规准的表面粗糙度值满足要求,见表2.6-15。
表2.6-15 满足要求的三种加工规准参数

通过对比,精加工规准选用C310比较合适,加工后外观质量好。
2)根据给出的电极单面收缩量200μm选择粗加工规准。由表2.6-13可查到满足电极单面收缩量的有三种规准可选择,见表2.6-16。
表2.6-16 满足要求的三种加工规准参数

由于粗加工蚀除量多,在重视电极损耗比的情况下,应验算是否满足面积效应(电流密度i≤10A/cm2)的要求:
加工面积S=0.92=0.81(cm2);可通过的加工电流:ie=i×S=10×0.81=8.1(A)。
表2.6-16中三种加工规准都满足加工电流的要求,综合考虑应选用C150加工规准。
3)半精加工规准的选择。粗加工选C150,精加工选C310,那么半精加工规准如何选择呢?按照前面介绍的加工电流或表面粗糙度值减半的原则,应选择Ip3(Rz18μm)和Ip2(Rz12μm)作为半精加工规准。同样查表2.6-13,找出满足Ip3、Ip2的加工规准进行比较,见表2.6-17。
表2.6-17 满足Ip3、Ip2的三种加工规准的对比

通过比较中加工规准选择C220、C210比较合适。
由此确定加工条件的转换为:粗C150→半精C220→C210→精C310。
4)加工进给量和摇动量的计算。表2.6-18列出了所选加工规准的各项数值和计算结果。
表2.6-18 列出了各参数之间的关系 (单位:μm)
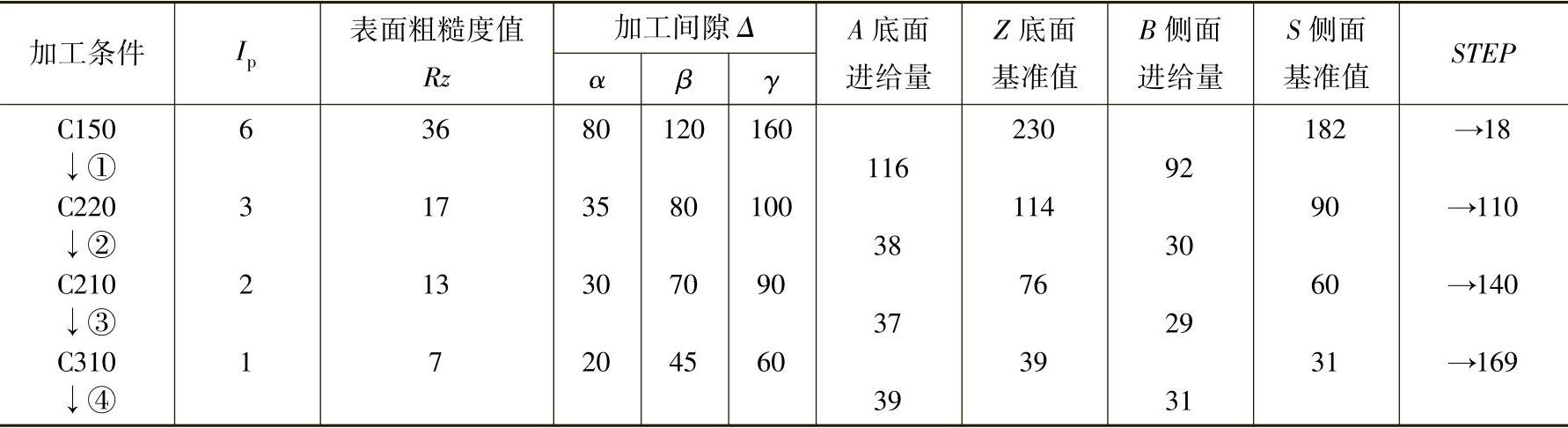
其各项数值的计算简略介绍如下:
① 根据公式(2.6-8)计算各加工规准底面进给量A及各加工规准距最终加工底面的基准值Z
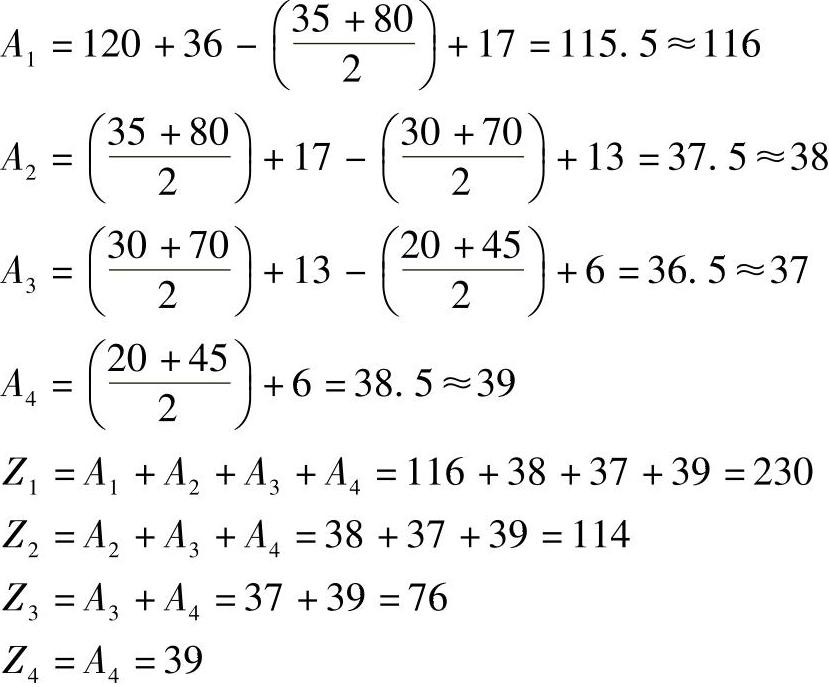
② 根据公式(2.6-9)计算各加工规准侧面进给量B,系数取0.8
B1=115.5×0.8=92.4≈92
B2=37.5×0.8=30
B3=36.5×0.8=29.2≈29
B4=38.5×0.8=30.8≈31
③ 根据公式(2.6-10)计算各加工规准摇动量STEP,δ=200μm
S1=B1+B2+B3+B4=92+30+29+31=182,STEP1=δ-S1=200-182=18
S2=B2+B3+B4=30+29+31=90,STEP2=δ-S2=200-90=110
S3=B3+B4=29+31=60,STEP3=δ-S3=200-60=140
S4=B4=31,STEP4=δ-S4=200-31=169
2.6.2.2 数控电火花成形加工的工艺技术
多轴数控电火花成形加工(NCEDM)与普通电火花成形加工(SEDM)工艺相比决不仅仅是省力,而主要是扩展了应用范围,保证了加工质量并缩短了交货期。两者的主要区别在于自动(automatic)和自主(autonomic)两项功能。自动的内容包括自动编程和自动设定加工规准、自动定位、自动电极交换、自动的成形和摇动加工、自动检测。自主,即人工智能,随时适应加工状况优化加工参数,保证加工的安全和高效率,减少对操作者的依赖和人为的差错。另外,多轴数控机床使得加工进给的方向不是唯一的,可以在除安装面之外的任意面上进行加工,即实现五面体加工。再者,传统单方向进给平动修侧面方式也随之被扩展为可以在任意平面上多轨迹平动加工。因此,多轴数控电火花成形加工有其更先进和独特的工艺技术。
NCEDM主要涉及的工艺技术有多坐标系设定技术,自动定位技术和在机检测技术,多功能、多方式的摇动技术,多种加工方式技术(单轴水平加工、两轴联动平面加工、三轴联动空间加工、任意轴与C轴联动加工、反拷贝加工、轨迹加工)等。下面对各种工艺技术进行介绍。
1.多坐标系设定技术
它是设定当前加工所处的坐标系和坐标数值以及记忆其他坐标系的数值的方法。一般有6~8个坐标系和一个机械坐标系。可方便地用于多工件、多型腔的加工、检测和数据对比,可方便地编制复杂程序。
2.自动定位和在机检测技术
在多轴数控电火花成形机床上,其最主要的功能之一就是定位、测量功能,这两者是相互关联密不可分的,是影响工件加工精度最重要的因素。该功能可保证精密多型腔模的加工,多工具电极法加工复杂型腔的重复精度,以及型腔的合模精度。
(1)自动定位技术 自动定位是指按照预定的要求,输入基本参数,由机床自动完成的定位方式。机床自动定位的速度可调,可重复接触四次,进行误差分析和计算,提高定位精度。测量结束后,移动到指定的位置,同时给出被测物的尺寸和几次测量的误差值。一般数控机床常见的定位功能见表2.6-19。
表2.6-19 各种自动定位模式
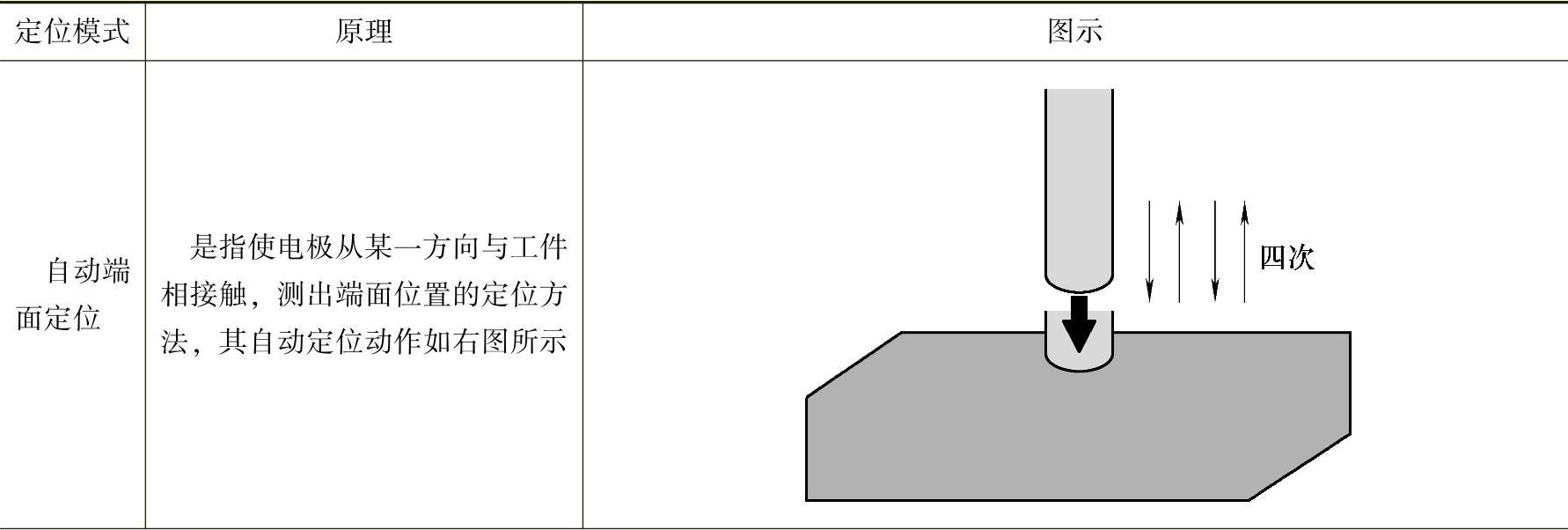
(续)
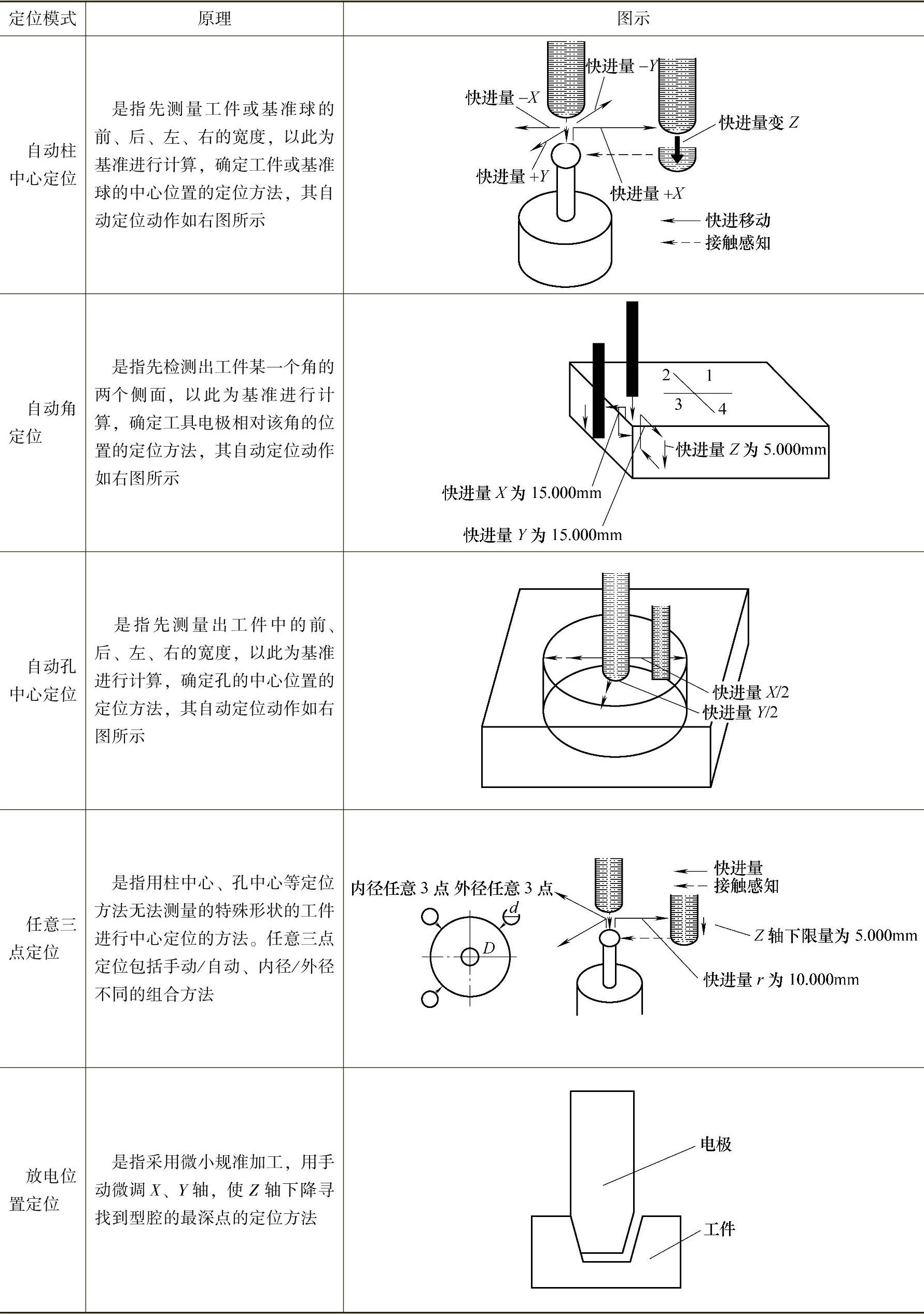
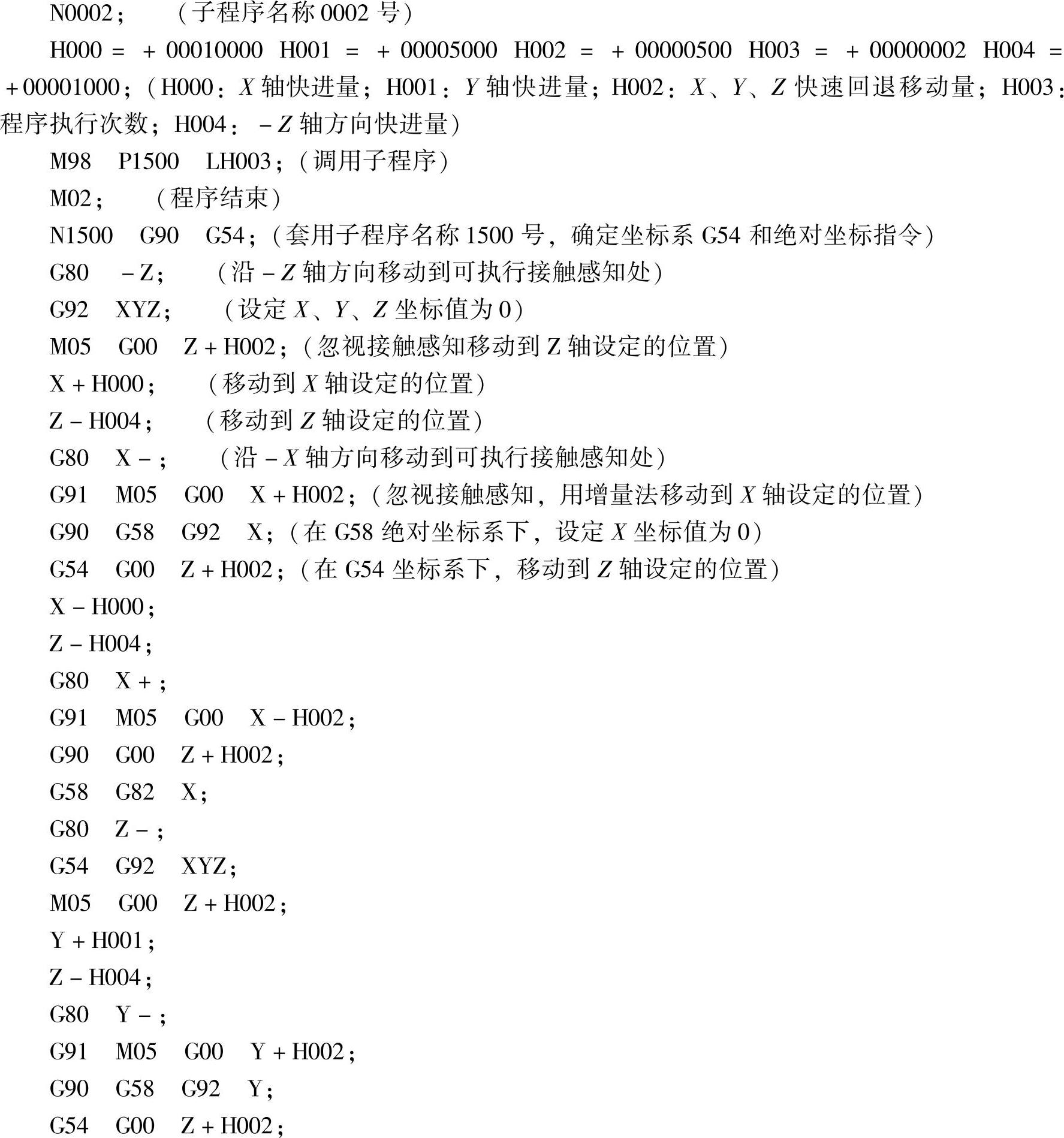
一般数控机床自动定位的方式有两种:定位模块和编制子程序。定位模块方式,按画面提出的内容输入基本参数,就可完成自动定位。编制子程序方式,是将定位功能编制好程序,在加工过程中调用子程序完成自动定位。这种定位方式便于自动完成从定位、加工、测量的全过程,利于自动化的连续操作。下面以自动柱中心定位为例,对两种方式进行说明。
1)定位模块方式。首先输入基本参数:如测定次数(1~3次)、测定值允许误差、接触感知动作选择(是/否)、接触感知后反转值、快进量、测定后坐标0设置(是/否)、测定子直径(d)、测定后移动距离等;然后将电极/测球移到须定位的被测物上方(距端面1mm左右),目测X、Y两方向基本对中;准备完成后,执行定位功能,电极/测球将移动到指定的位置,同时给出X、Y两方向的数值和几次测量的误差值。
2)编制子程序方式。程序编制有两种:一种是形状为正方形或圆形,另一种则是不规则形状,现以第二种为例,子程序如下:
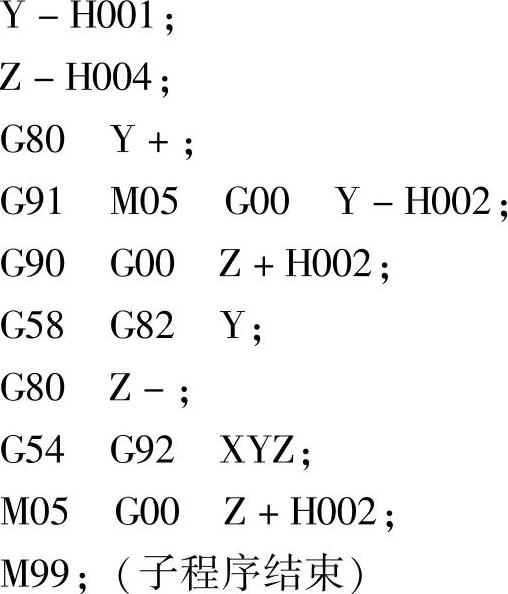
(2)在机检测技术 将自动定位功能进一步延伸,借助标准球为测量球和相应的计算就可对工件和工具电极进行检测,相当于三坐标测量机。
在机检测技术主要用途如下:
① 对已加工件各尺寸和相对位置的检测。
② 对工具电极各尺寸和损耗的检测。
③ 对尺寸精度要求在微米级的精密微细件,特别是拆下无法重复安装的件,在加工过程中实时对加工的型腔尺寸和工具电极进行在机测量,以判断是否符合加工精度要求,计算继续加工的进给量,直到检测合格。这是加工精密微细件不可缺少的条件。
下面介绍几种在机测量技术的应用。
1)对工件各加工表面上型腔尺寸的测量。该测量主要是利用数控系统的自动端面定位功能进行的。测量时可使用测针或测量球。加工深度的测量:用测量球在同一方向上自动碰不同深度的型面,记录各型面的坐标值并计算差值,即得到型腔的深度尺寸。加工宽度的测量:先用测量球在被测型腔中碰一个型面,再向相反的方向碰另一面,记录并计算两次所得到的坐标差值,再减去或加上测量球的尺寸,即得到型腔的宽度或型腔的内径尺寸。
2)锥面尺寸的测量。图2.6-18所示为带锥度工件的各尺寸之间相互关系的测量示意图。该测量主要是利用数控系统的自动柱中心定位功能和相应的计算来完成的。
测量的方法如下:使用ϕ2mm的测量球,先碰工件的上表面(33.40表面),以此面为基准0,然后向下移动固定距离h,在此高度上测量工件的外径为d1,以下为计算方法:
设测量球半径为R,锥度半角为α,则
测量球与工件相碰的测量点至基准0点的距离H为:
H=h-(R-Rsinα) (2.6-11)
测量点位置实测直径尺寸D为:
D=d1-2Rcosα (2.6-12)
按图纸计算该测量点的理论值D′为:
D′=d2+2Hcot(90°-α) (2.6-13)
将R=1、α=15°代入式(2.6-11)、(2.6-12)、(2.6-13),得
D=d1-1.932 (2.6-14)
D′=0.536h+33.003 (2.6-15)
再将向下移动的距离h、检测的工件外径d1代入式(2.6-14)、(2.6-15),计算D和D′,比较D与D′的数值即可知加工是否达到尺寸要求并确定继续加工所设定的数值。
实际操作时,要多测量几个点,计算后取平均值以求准确。
3)工件基准与基准球之间坐标的测量。在精密复杂型腔模具的加工过程中,使用基准球建立加工基准坐标系,对于提高复杂模具多型腔之间的尺寸精度和模具整体精度是非常有用的,而且还为加工中使用多电极的重复定位及多次加工提供了方便的定位基准。这种方式一般用于模块上多方向均有型腔、基准面不易确定或不便使用的情况。
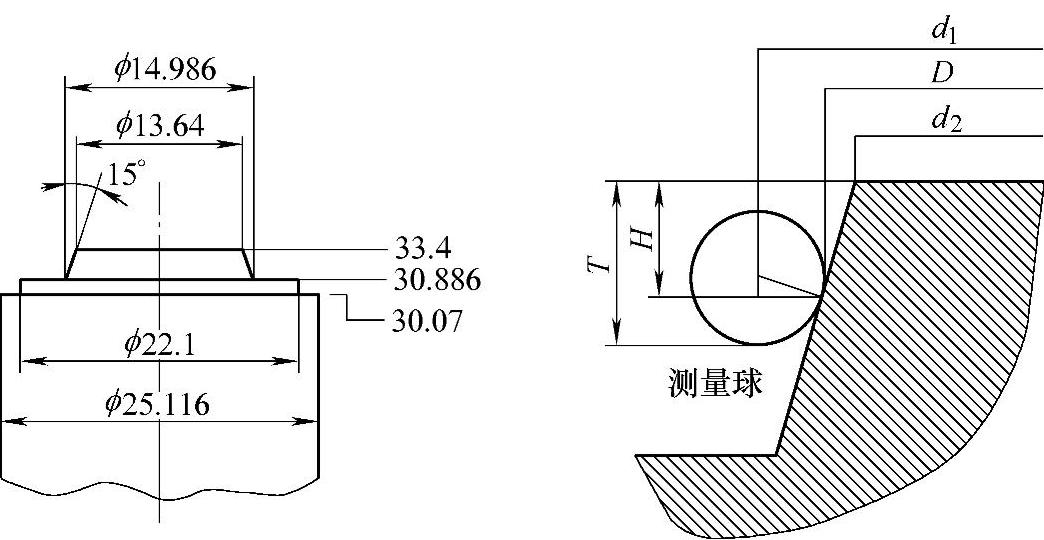
图2.6-18 带锥度工件的测量示意图
如图2.6-19a所示的模具模块,该模块上型腔复杂,除安装面之外,各面上都有需加工的型腔,且相互之间尺寸精度要求高。模块的设计基准为ϕ30.155mm圆孔。这一基准不能直接用作电极定位。为了便于电极定位,在模块之外安装了基准球,以基准球来作为整个加工系的定位基准。因此,就必须测量出球心与工件基准之间的距离x1、y1、z1,以便加工中电极定位使用。
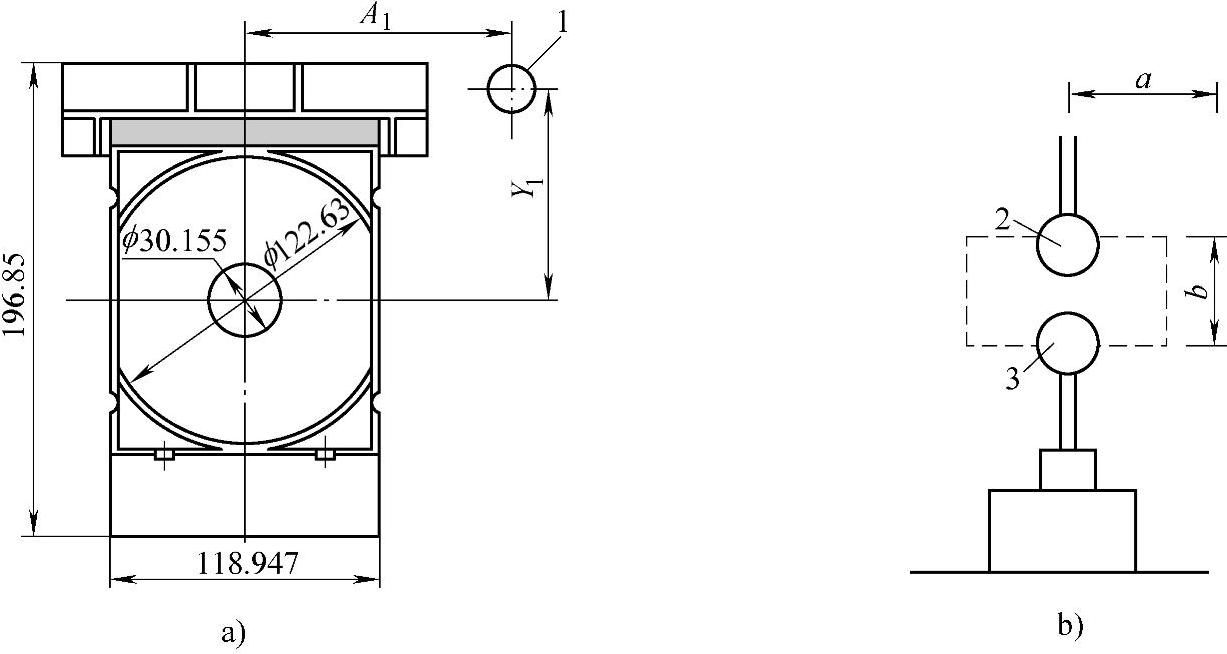
图2.6-19 模具的加工
a)工件与基准球的安装位置 b)测量球与基准球的位置
1、3—基准球 2—测量球
具体测量方法如下:
① 建立坐标系。第1坐标系为加工坐标系,用A01表示;第2坐标系为基准球坐标系,用A02表示,基准球安装在不防碍加工的位置,基准球直径为6mm。
② 电极接柄头上安装测量球,直径为6mm。在A02坐标系中用测量球确定基准球的位置。先把测量球移动在基准球上方(见图2.6-19b),用自动柱中心定位,输入相应参数,执行后确定基准球与测量球的中心位置,其坐标值X=0、Y=0、Z=+1.0。
③ 切换到A01坐标系,用测量球确定基准球与工件的位置关系,将主轴上的测量球移动至工件上的基准ϕ30.155mm圆孔中,使用自动孔中心定位,输入相应参数,使测量球找到圆孔的中心位置,即坐标值(X1、Y1),存储该坐标值,再将测量球移到工件的上表面,在该面基准位置处碰端面并返回到Z=1.0的坐标位置(Z1),并存储。此时被存储的X1、Y1、Z1坐标值既为工件基准与基准球之间的距离。
④取下测量球,换上所需用的电极并进行自身找正。在A02坐标系下,将电极移到基准球的上方并找正定位。再根据基准球与工件基准之间存储的X1、Y1、Z1坐标值及所要加工的型腔的位置尺寸,将电极移到加工位置完成找正。
以上分析可见,这种定位测量方法的使用,可使模块上所有型腔的基准一致,减少了重复定位的次数及不必要的定位误差。
在机检测和基准球的使用方法还有许多,在后面的实例中再给予介绍。
3.多功能、多方式的摇动技术
摇动(又称LORAN)加工功能是NCEDM必须具备的功能之一。前面已对摇动加工的类型和作用进行了介绍,这里对摇动加工的基本参数和使用方法进行说明。
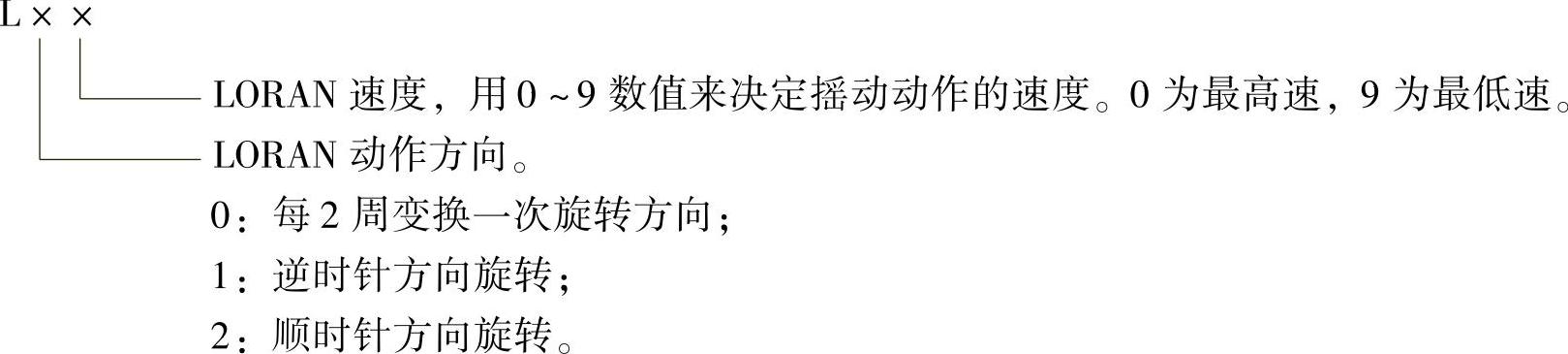
(1)摇动加工控制的基本参数 反映摇动加工的基本参数有:摇动类型、摇动平面、摇动方式、摇动速度、摇动象限和摇动量。用LN×××、L××、LP×××、STEP××××符号表示。其符号的定义内容如下:
1)LN:决定摇动动作的类型、伺服方式、动作平面、轨迹形状。
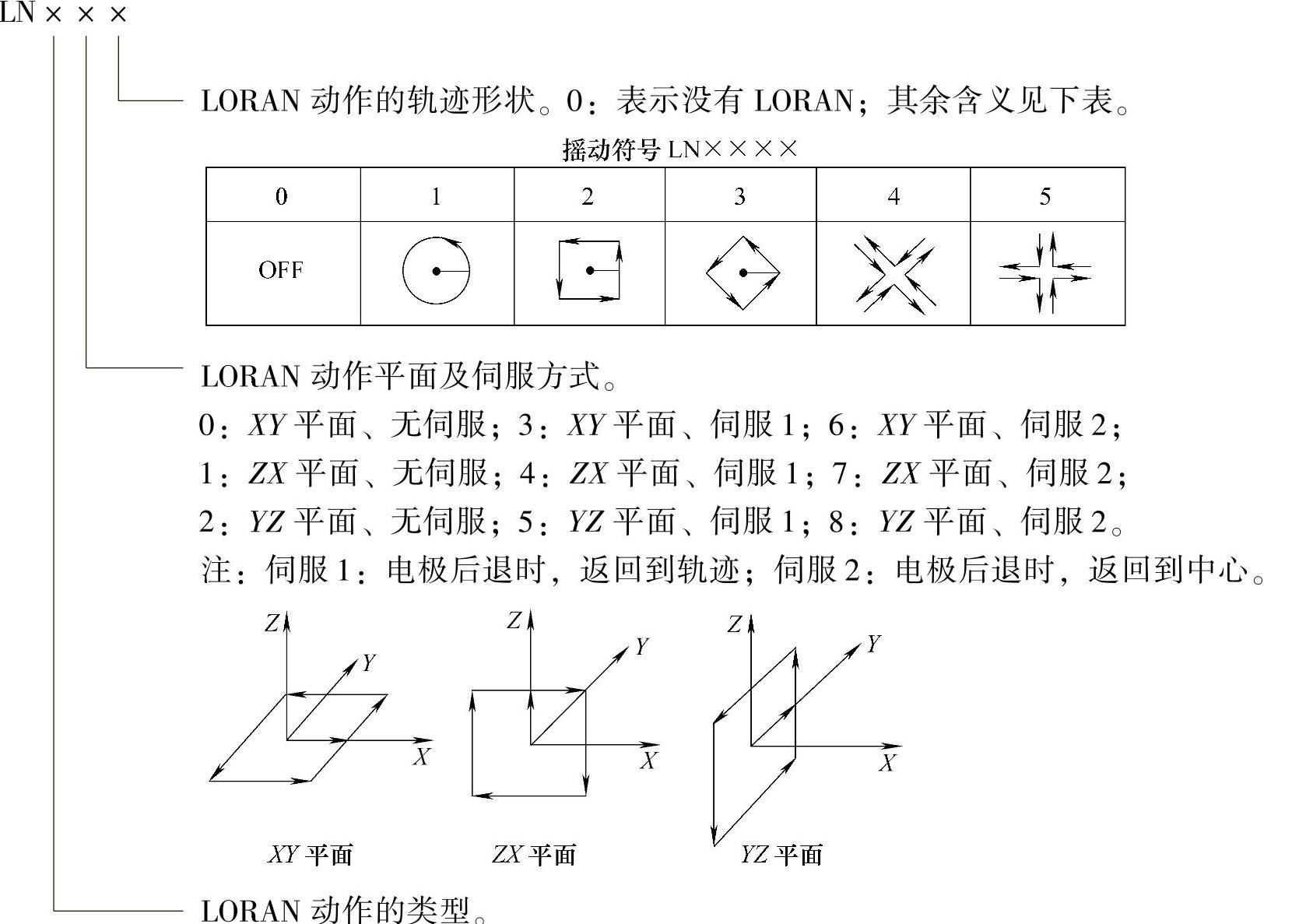
0:FREE LORAN;5:分象限FREE LORAN;
1:HS LORAN;6:分象限HS LORAN;
2:LOCK LORAN;7:分象限LOCK LORAN。
2)STEP××××:决定在摇动动作中的摇动量,单位为μm,输入的范围一般为5~9999μm。
3)L:决定摇动动作的方向、速度。
4)LP:分象限LORAN时,决定LORAN动作的轨迹形状。
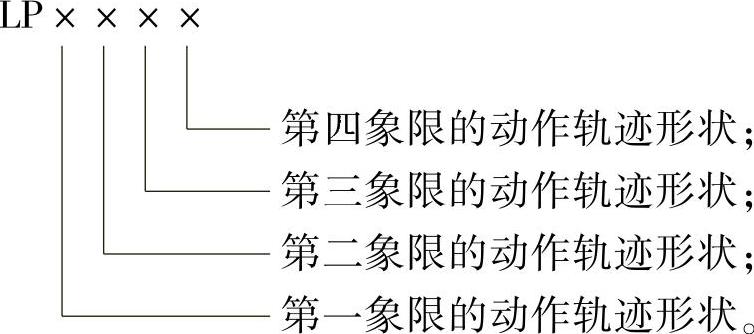
注:作为LORAN动作的轨迹形状,可输入0~5,共五种形状,数值为0时,这个象限无LORAN动作。
例如:程序为:LN500;
LP1024;
其分象限的LORAN动作轨迹如图2.6-20所示。
在分象限LORAN动作中,前一象限LORAN动作的结束点与后一象限LORAN动作的起始点不同时,在前一象限动作结束后,后一象限动作开始点之间,自动插入直线运动。
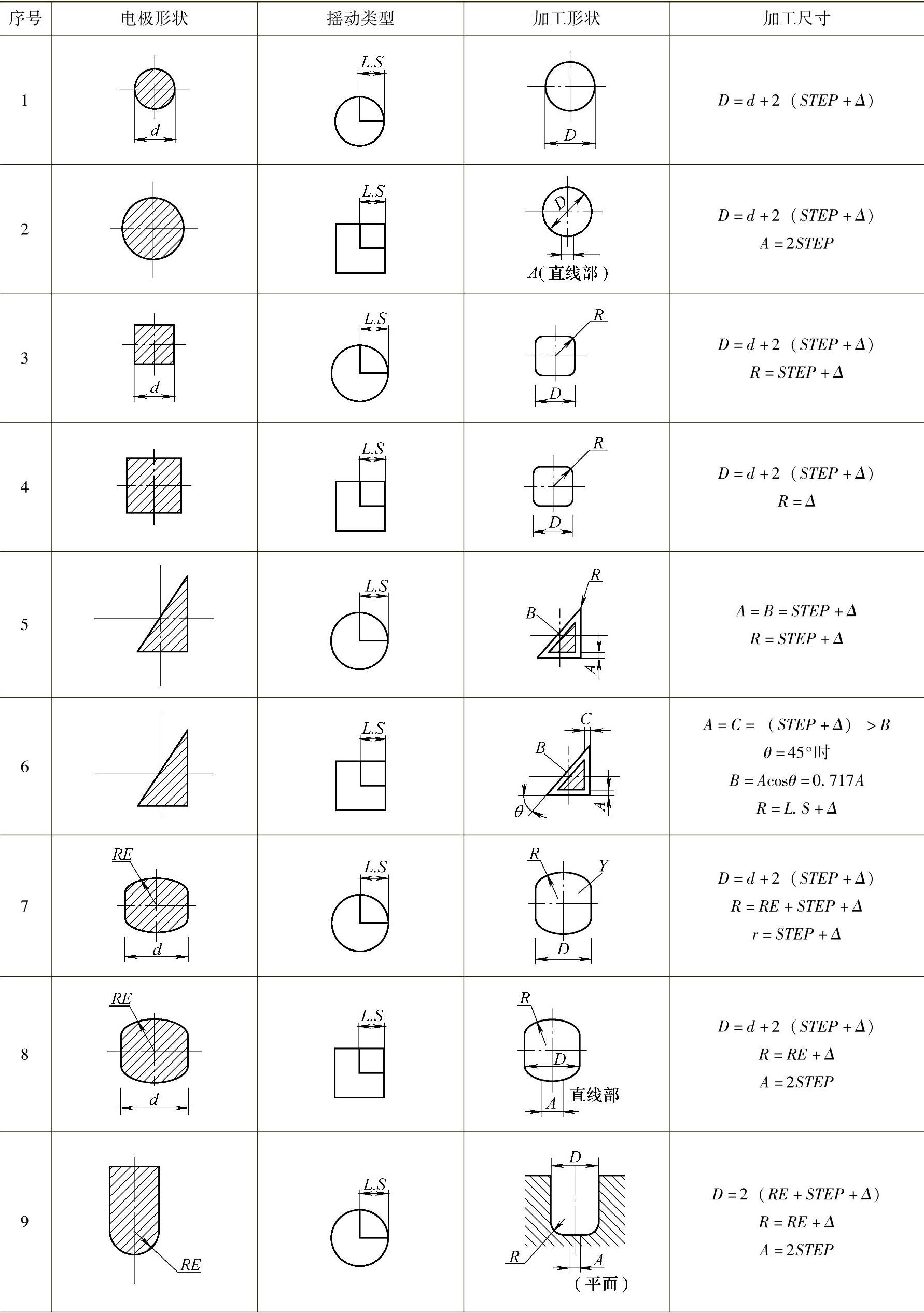
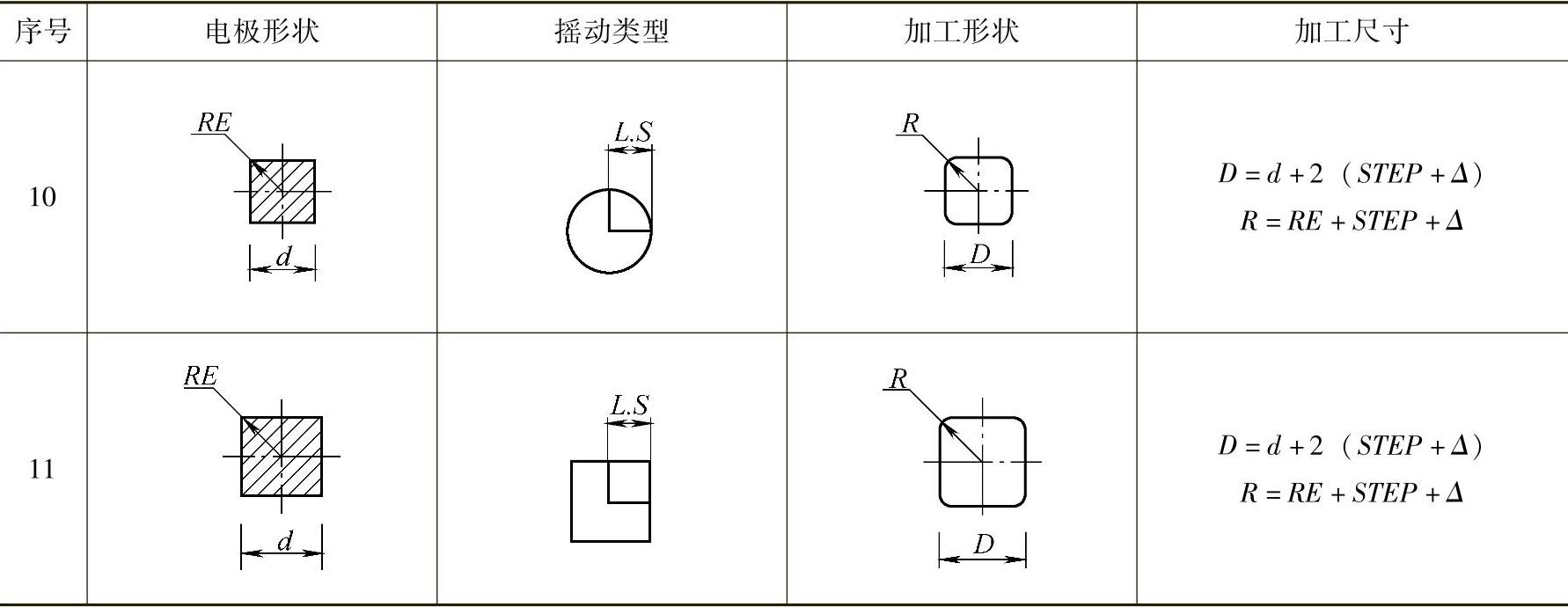
(2)摇动类型的合理选用 摇动类型要根据电极的形状、加工形状来选择。最常使用的类型为圆形和正方形,约占90%左右。表2.6-20所示为电极的形状所对应的摇动类型。表2.6-21所示为摇动类型与加工尺寸的关系。
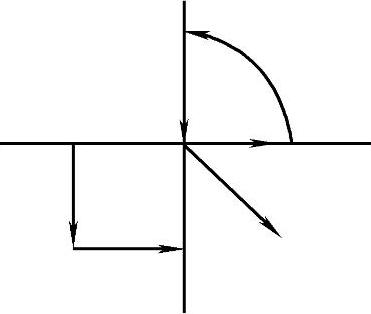
图2.6-20 分象限的LORAN动作轨迹
表2.6-20 电极的形状所对应的摇动类型
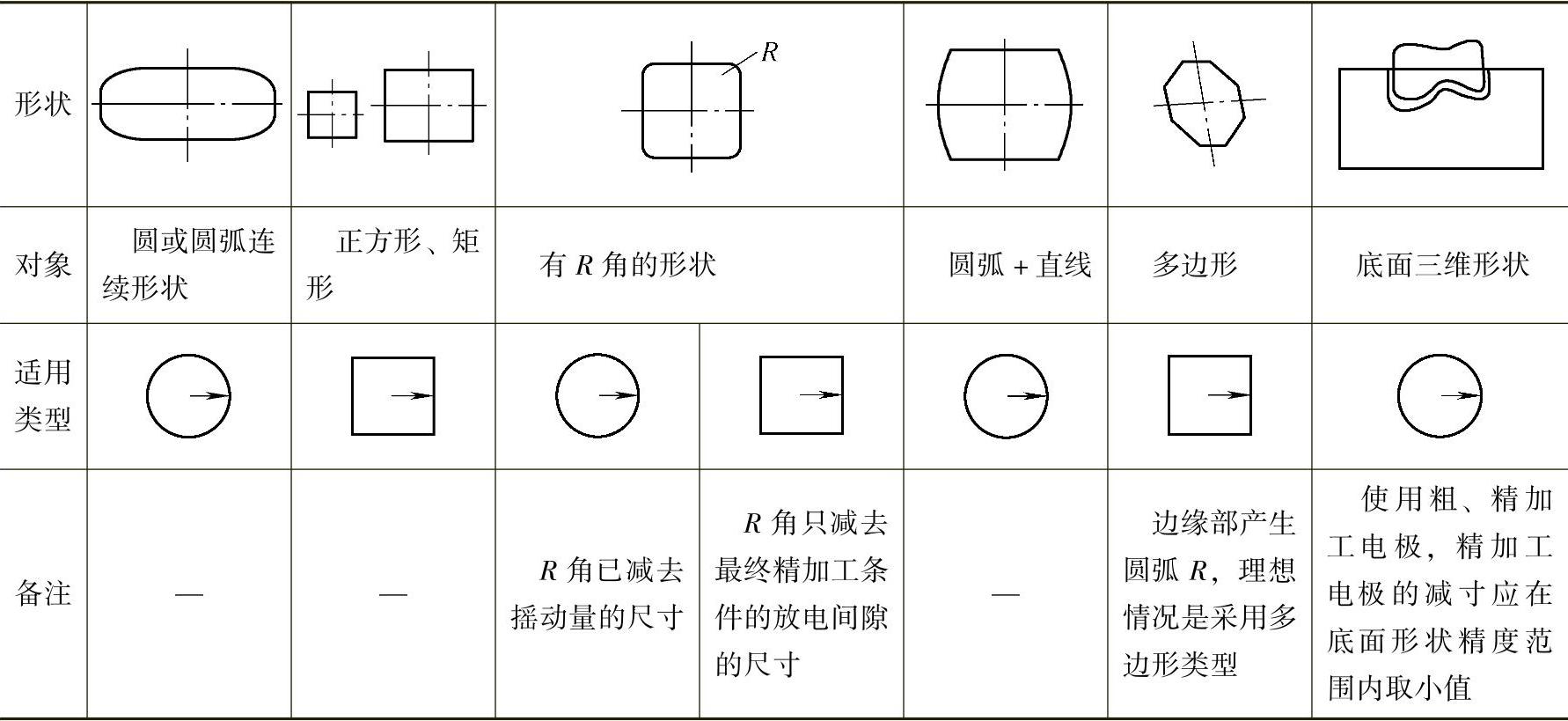
表2.6-21 摇动类型与加工尺寸的关系
(续)
在进行摇动加工时,如摇动类型选择不合理,会严重影响型腔的形状精度和尺寸精度。下面用一正方形电极分别按五种摇动轨迹形状进行加工,则摇动后的型腔形状如图2.6-21所示。由图2.6-21可见,摇动轨迹形状不同,加工型腔的形状有很大的差异。
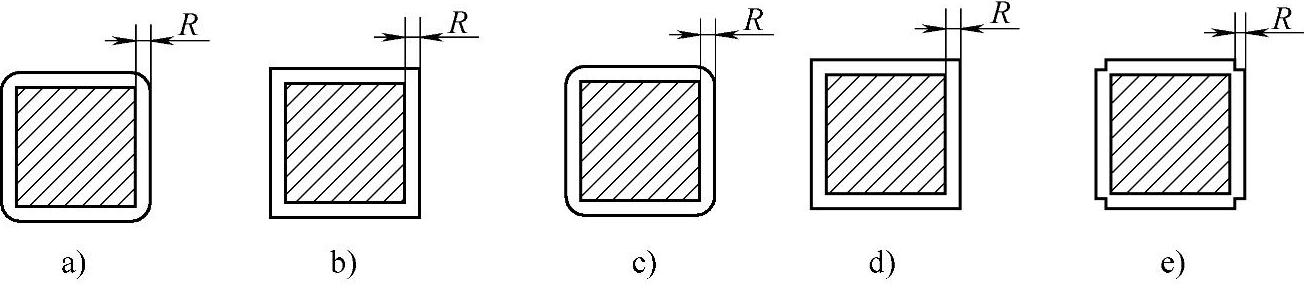
图2.6-21 摇动后的型腔形状
a)01 b)02 c)03 d)04 e)05
下面以三叉冲头工件为例来分析采用不同摇动轨迹形状产生的误差。如图2.6-22所示,该工件尺寸精度要求很高,需同时保证三个叉的宽度尺寸和圆的直径尺寸。因此,加工时可选用的摇动轨迹形状只能是01和03,而不能选用02、04和05。如用02、04、05轨迹加工,不仅不能保证圆的形状精度,还会造成三个叉的宽度尺寸不一致,其宽度尺寸误差如下:
1)如选用方式05摇动加工,则上面的一个叉在宽度方向上的去除量为2STEP,而下面两个叉在宽度方向上的去除量为1.732STEP,加工后的三个叉宽度尺寸之差为0.268STEP。
2)如选用方式04摇动加工,同样上面的一个叉在宽度方向上的去除量为2STEP,而下面两个叉在宽度方向上的去除量为2.732STEP,加工后三个叉宽度尺寸之差为0.732STEP。
由此可见,摇动量STEP越大,则三个叉的宽度尺寸误差也越大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。