



1.矢量电流-电压法的原理
矢量电流-电压法是最经典的方法,它直接来自于阻抗的定义。根据欧姆定律,阻抗可以看成是电路中电压与电流之比,在正弦交流的情况下,电压与电流的比值是复数,于是阻抗表示成

导纳为

为了测量流过阻抗的电流 ,与ZX串联接入一个标准阻抗RS,如图10-11a所示,由图可见
,与ZX串联接入一个标准阻抗RS,如图10-11a所示,由图可见 ,则
,则

这样就将阻抗Zx的测量变成了两个矢量电压比的测量。图10-11b中在Zx与Rs串联电路中采用运算放大器后, 与
与 有一公共接地参考点,更便于测量,为最常用的变换电路。
有一公共接地参考点,更便于测量,为最常用的变换电路。
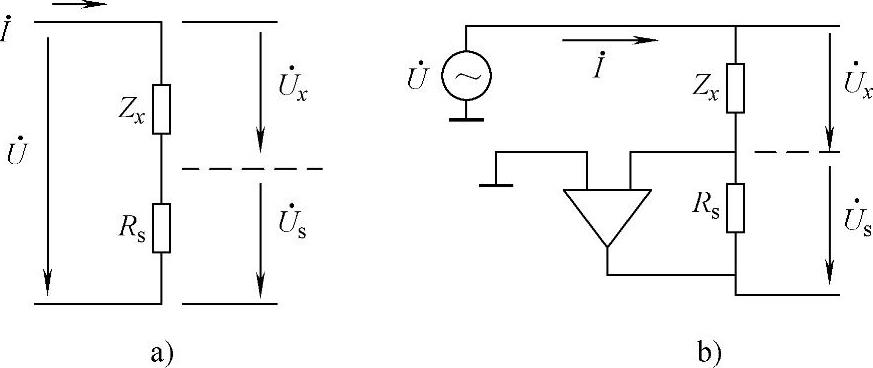
图10-11 引入标准阻抗测试图
图10-12为采用微处理器的矢量自动测量原理框图。在式(10-33)中,Zx、 、
、 皆为复数,显然,若被测阻抗为纯阻,则
皆为复数,显然,若被测阻抗为纯阻,则 、
、 同相;若被测元件为复数阻抗,则
同相;若被测元件为复数阻抗,则 、
、 间具有一定的相位差。相位差的不同,表明阻抗的有功分量和无功分量的差异,测出比值
间具有一定的相位差。相位差的不同,表明阻抗的有功分量和无功分量的差异,测出比值 的实数部分和虚数部分,就可以根据式(10-31)求得被测阻抗的有功分量和无功分量。利用同步检波器或模拟乘法器构成的相位检波器,可方便地进行虚实部分离。已知的标准阻抗的参数预先存储在ROM中,两次测出的
的实数部分和虚数部分,就可以根据式(10-31)求得被测阻抗的有功分量和无功分量。利用同步检波器或模拟乘法器构成的相位检波器,可方便地进行虚实部分离。已知的标准阻抗的参数预先存储在ROM中,两次测出的 和
和 可以存储在RAM中,由微处理器最后完成计算处理。
可以存储在RAM中,由微处理器最后完成计算处理。
实现上述矢量除法运算的途径与图10-12中相敏检波器相位参考基准的选择紧密相关,可分为固定轴法和自由轴法。所谓固定轴法就是相位参考基准方向为固定的;自由轴法是相位参考基准方向为任意的。
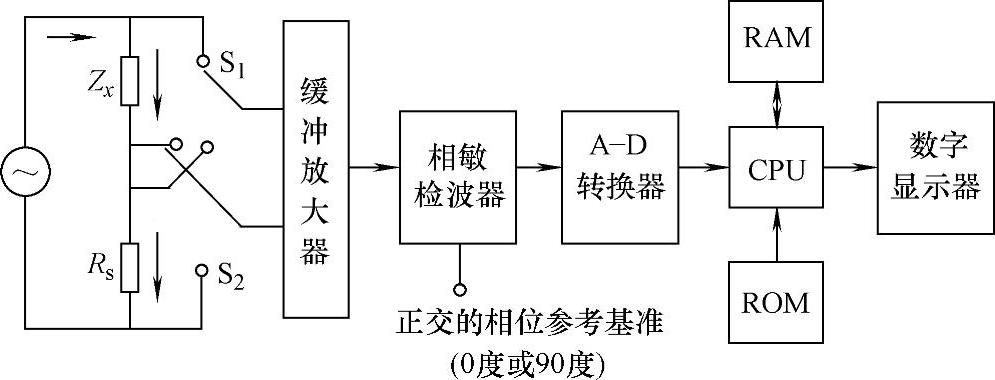
图10-12 阻抗的数字测量法原理框图
(1)固定轴法
双斜积分A-D转换器具有电压量除法运算功能,但它只能实现简单的标量除法,对矢量除法无能为力,因此,必须将式(10-33)的矢量除法转换成标量除法。如果把复数阻抗的直角坐标x轴方向固定地选取在分母矢量方向上,如图10-13所示,就会使分母矢量只具有实部分量。这时 因在x轴上只有实部即
因在x轴上只有实部即
则代入(10-33)中,有(https://www.xing528.com)

由式(10-34)可知,通过两个简单的标量除法运算能获得复杂的阻抗值。固定轴法要求把参考电压严格固定在 或
或 方向上,使矢量除法运算简化为两个标量除法运算。这种方法要使两矢量相位严格保持一致,给实现上带来困难,两者之间不同相而产生的误差,即同相误差。为确保精确的相位关系,硬件电路复杂,调试也困难。
方向上,使矢量除法运算简化为两个标量除法运算。这种方法要使两矢量相位严格保持一致,给实现上带来困难,两者之间不同相而产生的误差,即同相误差。为确保精确的相位关系,硬件电路复杂,调试也困难。
(2)自由轴法
自由轴法矢量关系图如图10-14所示,是采用自由坐标轴。即坐标轴可以任意选择。参考相位信号可以不与任何一个被测电压的方向相同,在整个测量过程中应保持不变,即与被测电压之一保持固定的相位关系。如相差α,在图10-14中
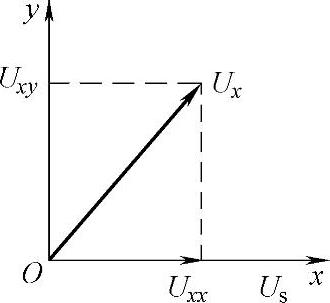
图10-13 固定轴法矢量关系图
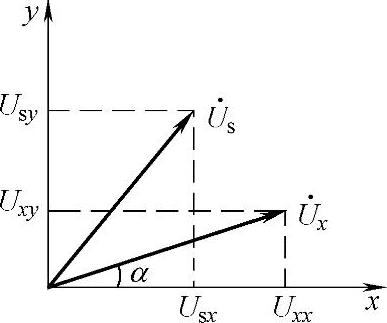
图10-14 自由轴法矢量关系图
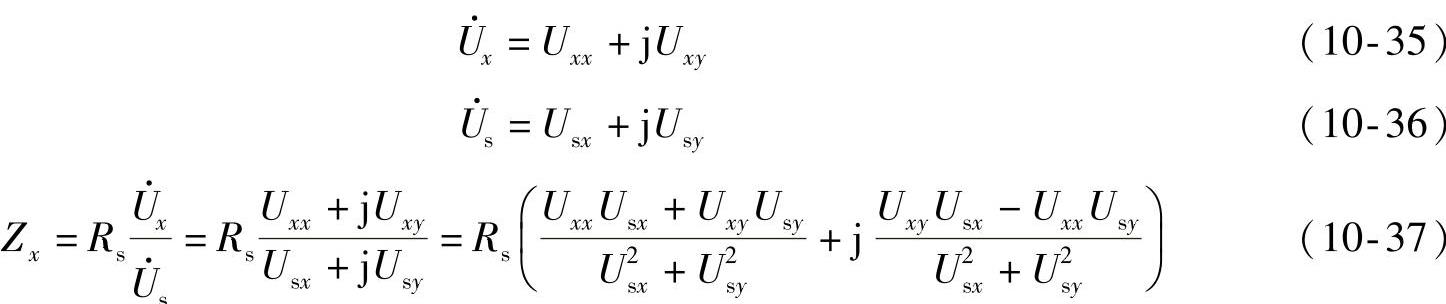
只要知道每个矢量在直角坐标轴上的两个投影值,经过运算即可求出结果。
在自由轴法测量中,相敏检波器的相位参考基准是受微处理器控制的自由轴发生器提供的,它是任意方向的精确的正交基准信号。相敏检波器通过开关选择 和
和 ,便可得到它们的投影分量,然后由A-D转换器变成数字量,经接口电路送到微处理器系统中存储,CPU对其进行计算得到待测数。
,便可得到它们的投影分量,然后由A-D转换器变成数字量,经接口电路送到微处理器系统中存储,CPU对其进行计算得到待测数。
自由轴法虽然采用矢量电流-电压法的基本原理,但由于其精确的正交坐标系主要靠软件来产生和保证,因此硬件电路大大简化,还消除了固定轴法难以克服的同相误差,提高了精度。同时被测参数是通过计算获得的,除了可以得到常用的C、L、R、D、Q外,还可方便地计算出多种阻抗参量,如Zx、Y、x、B、G、θ等。
2.智能化LCR测量仪的基本组成
图10-15是智能化LCR测量仪的基本组成框图。测试信号经限流电阻R0加到被测阻抗上,矢量电压 和
和 经开关S1选择送到相敏检波器,它的参考信号来自自由轴坐标发生器,后者在微处理器控制下产生任意方向的、精确正交的直角坐标系。开关S1先后接通
经开关S1选择送到相敏检波器,它的参考信号来自自由轴坐标发生器,后者在微处理器控制下产生任意方向的、精确正交的直角坐标系。开关S1先后接通 和
和 ,得到它们在坐标轴上的四个投影值,再由双斜积分A-D转换器变成相应的数字量,送到RAM中暂存。最后微处理器根据键盘输入的信息,选择适当的公式进行计算,得到被测量并由显示器显示出来。
,得到它们在坐标轴上的四个投影值,再由双斜积分A-D转换器变成相应的数字量,送到RAM中暂存。最后微处理器根据键盘输入的信息,选择适当的公式进行计算,得到被测量并由显示器显示出来。
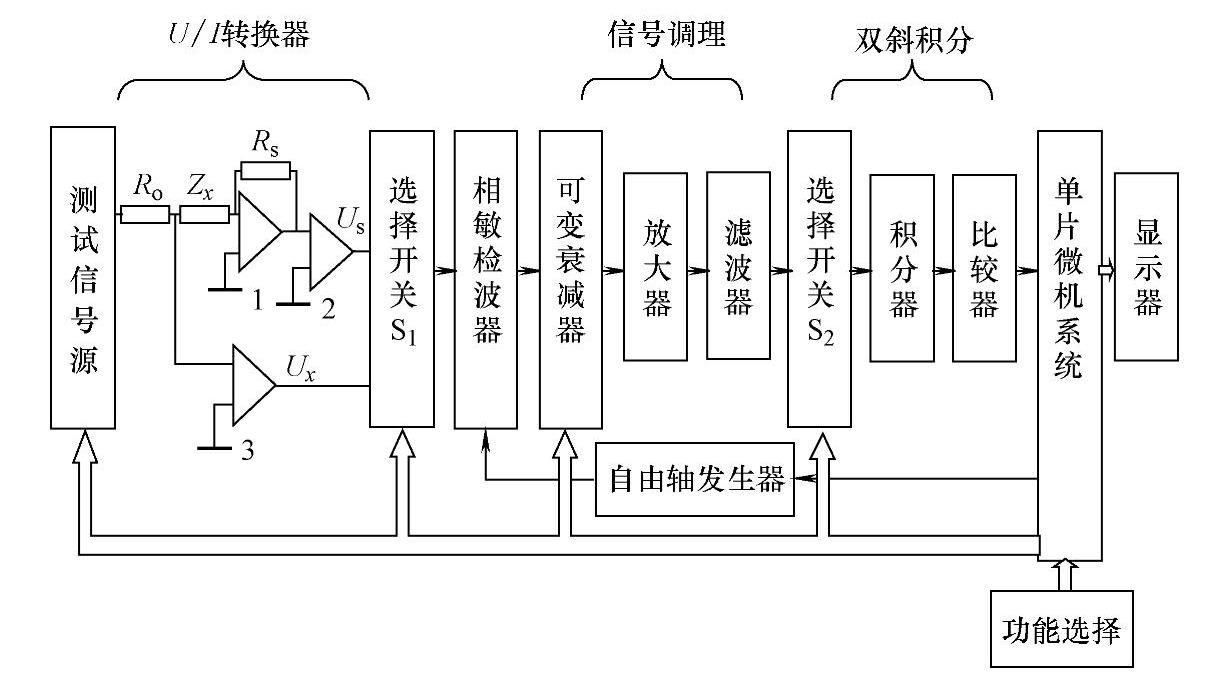
图10-15 智能化LCR测量仪的基本组成框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。