



DOG1型“原点返回”模式以DOG开关从ON→OFF后的第1个零点(Z相)信号作为“原点”,如图6-1所示。
1.DOG1型“原点返回”模式的动作顺序
1)“原点返回指令”起动,以“高速”运行。
2)碰上挡块,DOG开关=ON,从“高速”降低到“接近速度”。
3)当DOG开关从ON→OFF,从“接近速度”减速停止,速度降为零。此位置点为“A点”,又从“零速”上升到“接近速度”,当检测到第1个“Z相信号”时,该“Z相信号”位置就是“原点”,同时该轴停止在原点位置上(从“减速停止点A”到“Z相信号点”是定位过程,所以能够精确定位)。
2.“原点返回”不能正常执行的原因
1)从“原点返回起动位置”到“减速停止点A”这一区间内如果没有经过“Z相信号”点一次(Z相通过信号M2406+20N),系统会产生报警(ZCT:错误代码120)并减速停止,“原点返回”不能正常执行。这种情况是由于“原点返回起动位置”到“DOG挡块”距离很短,走完DOG挡块的行程还没经过“Z相信号”,系统无法识别“Z相信号”位置,所以出现错误。这种情况必须选择DOG2型“原点返回”模式。
2)如果DOG开关=ON,发出“原点返回”起动指令,则系统发出“严重错误”报警(错误代码1003),不执行“原点返回”。这种情况必须选择DOG2型“原点返回”模式。
3)在未设置“原点返回重试”功能时,如果“原点返回”已经完成而再次进行“原点返回”操作,会出现报警(错误代码115)。(https://www.xing528.com)
4)“Z相通过信号M2406+20N”如果不=ON,“原点返回”不完成。
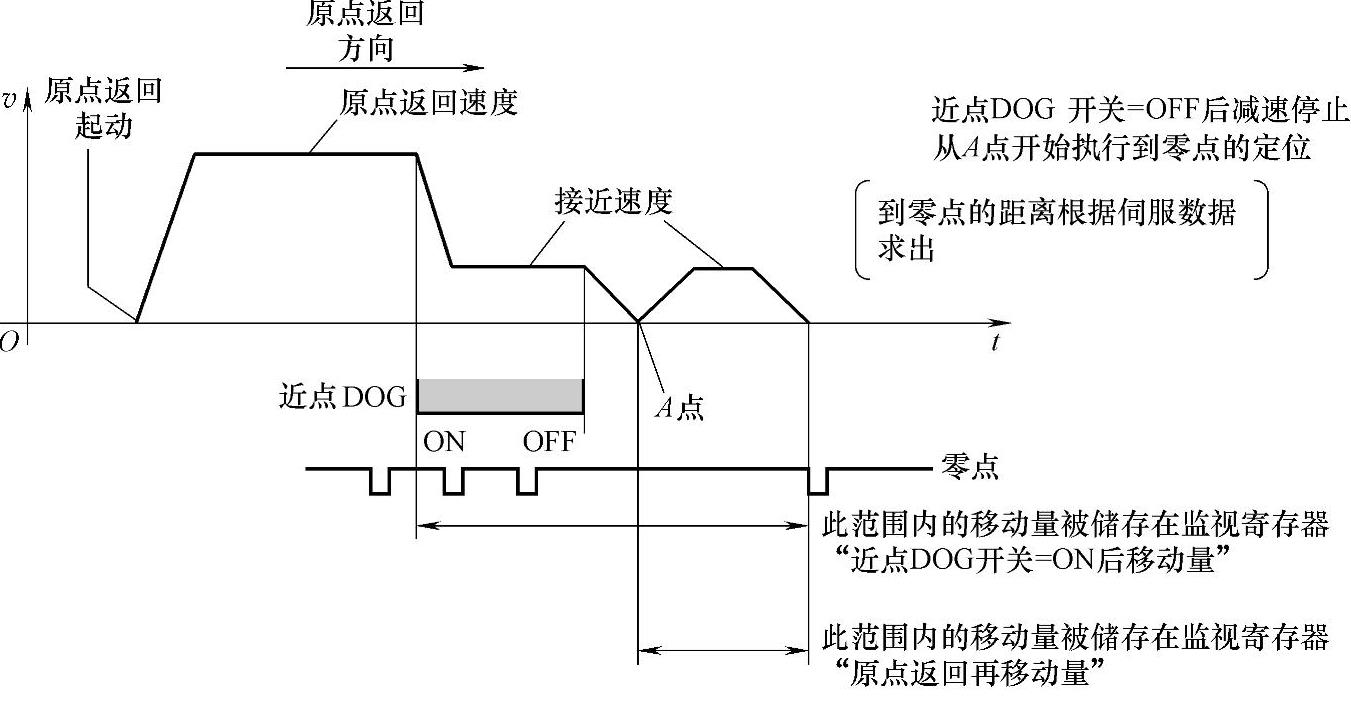
图6-1 DOG1型“原点返回”模式
3.关于必须经过“Z相信号”的说明
1)在执行“原点返回”操作时,必须使伺服电动机旋转一圈以上,使其经过一次“Z相信号点”。这样系统就识别“Z相信号点”位置。在实际操作时,可将机械移动到离开DOG挡块有电动机旋转一圈的距离以上。这样就保证在碰上DOG开关前经过了“Z相信号点”。
2)从“原点返回起动位置”到“减速停止位置”这一区间内必须经过“Z相信号”点一次(Z相通过信号=ON,M2406+20N)。
3)在绝对原点设置时,必须先用JOG方式移动电动机旋转一圈,使其经过一次“Z相信号点”。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。