



特征值和特征向量作为一对特征参数,可以由迭代法来求解。可以对特征向量进行迭代,得到特征向量后,再算出对应的特征值;也可以对特征值进行迭代,得到特征值后,再计算对应的特征向量。
1.特征向量迭代法
我们考虑机械动力学系统的特征值问题
Kφ=λMφ (5.63)
M,K分别表示质量矩阵和刚性矩阵。方程式(5.63)形式上类似于静态问题的方程Kx=F,因此可以利用5.1.2节中的迭代解法的思路来求解这个特征值问题。
假定特征值的初始值为λ=1,初估的特征向量为x1,则方程式(5.63)右边为R1=Mx1。由于这是一个初估值,一般并不满足Kx1=R1,否则,x1就是所要的特征向量。但是,我们可以根据方程式(5.63)构建以下迭代关系
Kx2=R1
其中,x2为一个新的特征向量估计。依次进行若干次迭代,就可以得到逼近真值的特征向量,这就是向量迭代法的基本原理。
以上迭代过程最先求到的是与最小特征值所对应的特征向量,其迭代原理可以用下式表示

由于原理上涉及刚性矩阵的逆,这个方法称为逆迭代法(Inverse Iteration),是求解特征值问题重要的迭代方法。当然,在实际运算中,并不进行矩阵的求逆运算,而是对刚性矩阵进行三角分解,即迭代过程是基于式(5.65)进行的

当i→∞时,xi+1→φ1。
另外,为了用模态质量对特征向量进行正规化,即为了使最终的特征向量满足

需要对上述迭代过程做以下修改

以上所述仅仅是迭代法的原理,实际的算法按以下更加有效的步骤进行
 →瑞利商(Rayleigh Quotient)
→瑞利商(Rayleigh Quotient)
当i趋近于∞时,yi+1趋近于 趋近于λ1。
趋近于λ1。
逆迭代法最先收敛于最低的特征值。各个特征值分开得越远,收敛速度越快。为了改进收敛速度,或者求解指定频率附近的特征值与特征向量,经常结合使用移位法(Shifting)。具体请参阅有关书籍。
如果把式(5.63)的左边作为输入,右边作为输出,则可以构建以下形式的迭代关系
Mxi+1=Kxi(https://www.xing528.com)
由此可以求得与最大特征值对应的特征向量。这种正向迭代方法通常称为幂法(因为在迭代过程中,相当于矩阵K的各次幂作用于向量x)。由于在结构分析中,通常所需的是结构的低阶固有值和模态,所以相对于幂法,逆迭代法(又称逆幂法)更为常用。
2.特征值迭代法
特征值迭代法是针对n阶特征方程来进行的(行列式用det表示)
det(K-λM)=0 (5.68)
最直接的方法就是将上述行列式展开,得到关于λ的n次多项式函数,用牛顿迭代法求解多项式的零点,即得特征值的解。但是,这种方法只适用于n较小的情况。对于大规模系统来说,计算多项式的系数是非常困难的工作。因此在实际中,这种方法是不被采用的。
这里,我们介绍利用矩阵分解来计算行列式值的方法。令
p(λ)=det(K-λM) (5.69)
对于大多数线性动力学系统来说,K-λM为对称矩阵,利用Cholesky分解,得
K-λM=LDLT (5.70)
这时,K-λM的行列式满足下列关系

这里,dii为对角阵D的元素。这样,给定一个λ值,进行矩阵分解,再根据式(5.71),就可以计算出与之对应的行列式的值p(λ)。
在此基础上,我们利用拟牛顿迭代法来求解方程p(λ)=0的根。
参照图5.13,假定λ1(k)是对最小特征值λ1的第k次迭代的近似值,则根据拟牛顿迭代法,可以得到以下迭代关系(弦切法)

利用该关系进行若干次迭代,即可得到λ1。这里,对于每次更新的λ1(k)所对应的行列式的值p(λ1(k)),利用式(5.71)进行计算。这样就回避了直接求解多项式系数的问题。
最后,我们介绍Sturm序列在求解特征值中的应用。
在结构动力学分析中,往往需要求出给定范围的固有频率,即求解λl<λ<λu范围的特征值。因此,首先需要判断在此范围有多少个特征值,然后把每个特征值分离开来,在各个局部范围上应用上述迭代方法,可以求出每个特征值来。
Sturm序列(Sturm Sequence)是确定一个多项式的根的个数的数学方法。例如要想知道在λl以下存在多少个特征值,可以对矩阵K-λlM进行Cholesky分解
K-λlM=LDLT
对角矩阵D中,负的元素的个数就是小于λl的特征值的个数。这就是Sturm序列的性质。利用这个方法,可以得到λl<λ<λu范围上的特征值的个数,再反复利用2分法,就可以把每个特征值分离出来。然后,在每个特征值附近应用拟牛顿迭代法,可求出每个特征值的准确值。得到特征值之后,如有需要,可以根据1.中所介绍的迭代方法求得特征向量。
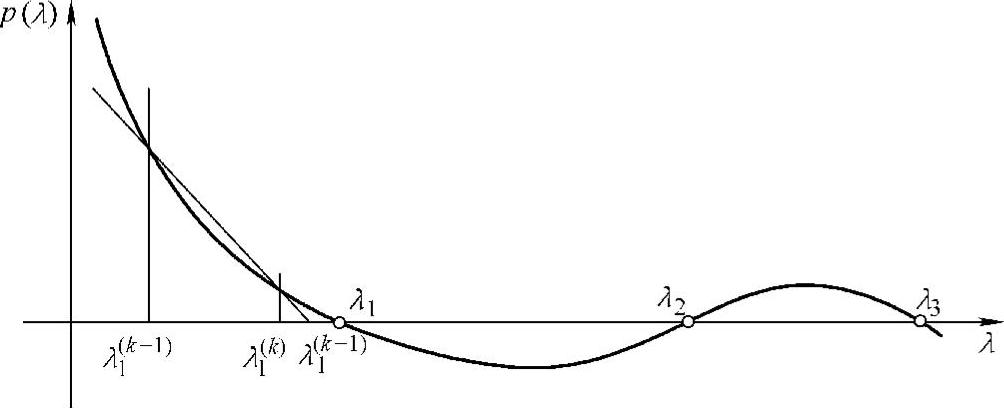
图5.13 求解λ1的拟牛顿迭代法
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。