



前面已经说过,传递函数综合法主要应用在把实验结果与数学模型相结合的混合解析中。这里来讨论如何把一个由传递函数表现的子结构纳入到有限元分析模型中去。
首先来考察如图4.11所示的情况。在这个例子中,上、下两个结构由两处的弹性元件相结合。假定下部的主体结构由有限元法进行建模,上部的子结构利用实验测量来构建其传递函数模型。这里,只考虑X、Y方向的平移运动。
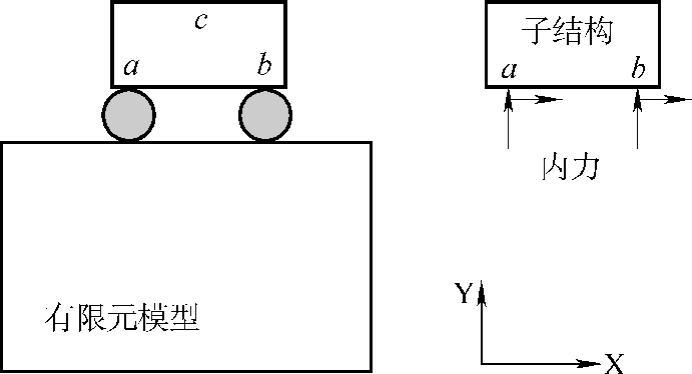
图4.11 传递函数综合法的例子
我们把主体结构以及弹性支撑元件作为剩余结构,把上部子结构从a、b的位置分离开,结合点自由度为ax、ay、bx、by。在结合点自由度上,可以构建子结构的动力方程为
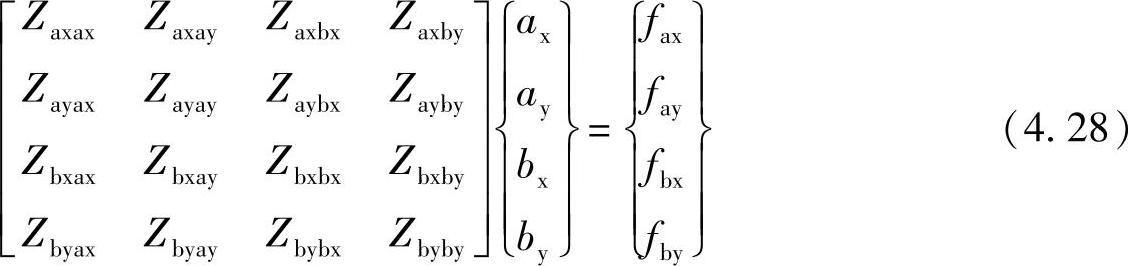

图4.12 三个弹簧构成的系统
式(4.28)中的系数矩阵就是子结构的动刚性矩阵。这个矩阵是对称矩阵,其中有10个独立的元素 。这个刚性矩阵可以理解为由10个弹簧构成。为了更容易地说明这一点,考察如图4.12所示的三个弹簧构成的系统,容易得到该系统的刚性矩阵为
。这个刚性矩阵可以理解为由10个弹簧构成。为了更容易地说明这一点,考察如图4.12所示的三个弹簧构成的系统,容易得到该系统的刚性矩阵为

可见,由三个弹簧可以构成一个2×2的刚性矩阵。各个弹簧常数与刚性矩阵的各个元素之间有以下关系
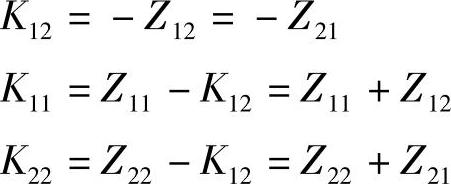
一般化关系:
由于动刚性是频率的函数,这些弹簧的系数也随频率而变化。从这个意义上来说,这些弹簧不是实际意义上的弹簧,而仅仅是力学含义上的虚拟弹簧。
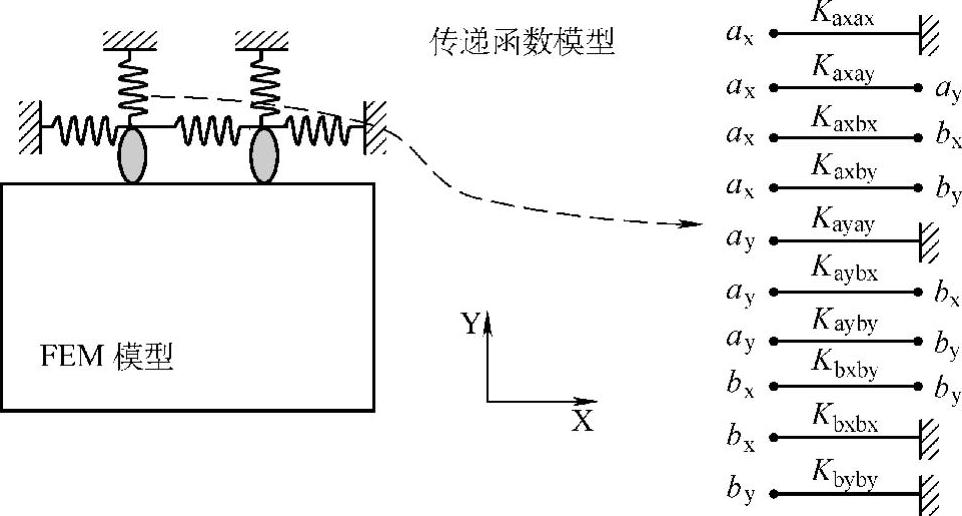
再回到图4.11的例子。将这个子结构模型与剩余结构的有限元模型(FEM)相结合,相当于在剩余结构的结合点处连接上10根随频率变化的弹簧,如图4.13所示(图中仅画出了5根弹簧,所有弹簧的连接关系由右边的10个线段表示)。这样,就可以得到导入了实验结果的有限元分析模型。之后的分析就像一般的有限元模型那样进行(在MSC.Nastran中,PELAST用于定义随频率变化的弹簧元素)。
 (https://www.xing528.com)
(https://www.xing528.com)
图4.13 用随频率变化的弹簧元素来定义子结构的动刚性
现在来考察如何通过传递函数测量来决定如图4.11所示子结构的动刚性。用G来表示传递函数(柔顺性函数),例如Gaxby表示在b点Y方向加振而在a点X方向上测量到的传递函数,则在内力作用下(这里假定没有外力),子结构在结合点上的响应可以表示为
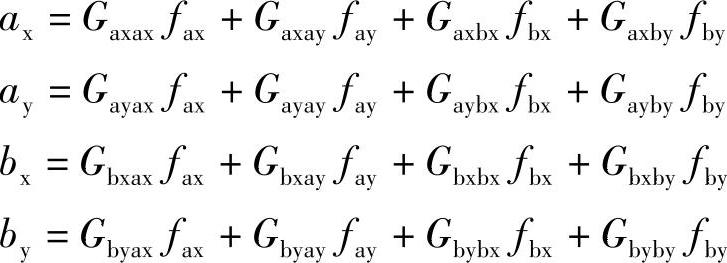
用矩阵形式表示为
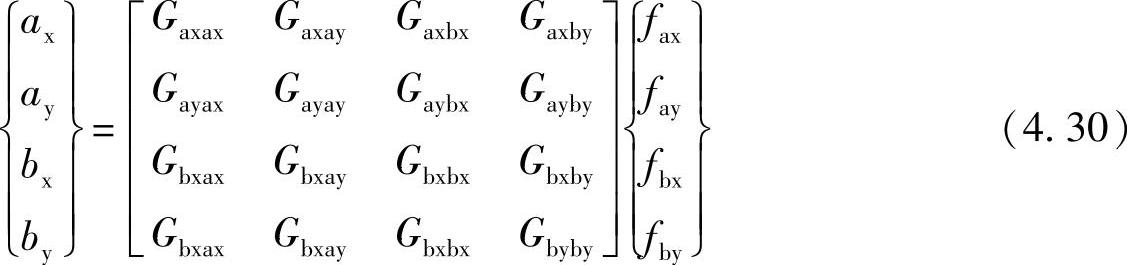
对比式(4.30)与式(4.28)可知,动刚性矩阵等于由传递函数构成的矩阵的逆,即
[Z(ω)]=[G(ω)]-1
综上所述,传递函数综合法的实现步骤是:
1)测量从主体结构分离开的对象子结构的传递函数(各个结合点以及各个方向上)。
2)构成传递函数方阵并求逆,得到动刚性矩阵。
3)根据式(4.29),决定各个虚拟弹簧随频率变化的弹簧常数。
4)将得到的各个弹簧连接到与主体结构的结合点上(弹簧常数为复数,实部代表刚性,虚部代表阻尼。在MSC.Nastran中,用PELAST定义)。
5)对于得到的混合模型,按照通常的有限元分析方法进行分析。但应注意,含有随频率变化的弹簧系统不能进行特征值分析。如果要进行特征值分析,必须把各个虚拟弹簧的值固定在某个代表值上。
最后需要指出的是,如果需要子结构内部某些位置的响应,则把这些点也要像结合点那样考虑进来。例如在图4.11所示的例子中,如果需要知道子结构上c点响应的话,则还应测量与c点有关的传递函数。这样,传递函数矩阵和动刚性矩阵不再是4×4阶矩阵,而是6×6阶矩阵,需要用21根虚拟弹簧来定义 。此外,如果子结构从主体结构分离后处于自由状态,则传递函数测量应该在这个自由状态进行;如果分离后子结构的其他部位存在约束,则应在这种约束条件下进行传递函数测量。
。此外,如果子结构从主体结构分离后处于自由状态,则传递函数测量应该在这个自由状态进行;如果分离后子结构的其他部位存在约束,则应在这种约束条件下进行传递函数测量。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。