



为了说明传递函数综合法的概念,我们先来看如图4.9所示的单自由度系统,其中的质量由两个质量块固结而成。该系统的自由振动方程为

变形为

其中,Z(ω)=k-ω2m1-ω2m2,称为系统的动刚性(柔顺性函数的倒数)。
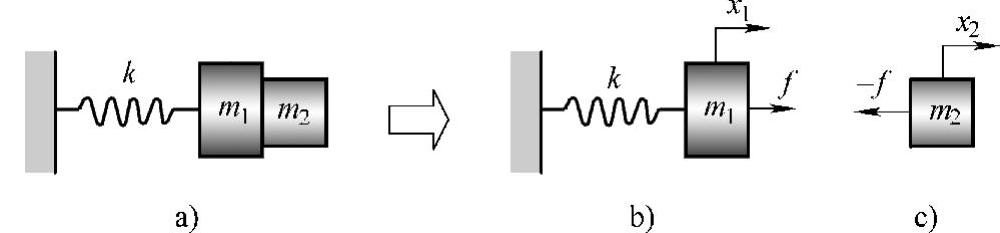
图4.9 由两个质量块固结而成的单自由度系统
a)单自由度系统 b)系统子结构1 c)系统子结构2
现在,把质量块m1和m2分开,二者的结合力用f表示,形成图4.9b和图4.9c所示的两个子结构,则对于子结构1,可得
结合点内力与结合点位移之间的柔顺性函数为

对于子结构2,可得
结合点内力与结合点位移之间的柔顺性函数为

将式(4.20)和式(4.21)与式(4.19)比较可知,系统的动刚性可以由两个子结构的传递函数的倒数合成而来,即

这就是最简单的传递函数综合法的例子。
现在再来考察如图4.10所示的二自由度系统。该系统的强迫振动方程为

变形为
 (https://www.xing528.com)
(https://www.xing528.com)
由式(4.22)可见,该系统的动刚性矩阵为


图4.10 二自由度系统的例子
a)二自由度系统 b)子结构1 c)剩余结构 d)子结构2
如果把该系统从弹簧k2的两个结合点分割开,可以形成以下子系统:弹簧k1与质量m1构成子结构1,质量m2构成子结构2,两个结合点之间的弹簧k2作为最终的分析对象,可以理解为剩余结构。对于子结构1和2,结合点处的加振点柔顺性函数为

对于剩余结构,可以列出以下方程(根据位移连续性条件,弹簧k2的两端结合点位移分别等于质量块m1和质量块m2的位移。这里,小写f代表内力,大写F代表外力)

式(4.25)的右边为未知的内力向量。根据线性系统的叠加原理,结合点的位移是由内力和外力的共同作用引起的,因此有以下关系

由此可得内力为
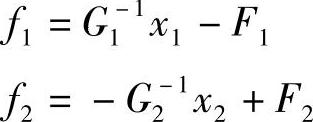
即
代入式(4.25),可得

式(4.26)是通过将两个子结构的传递函数在剩余结构(弹簧k2)的自由度上进行合成而得来的。将式(4.24)的结果代入,可见它与原有系统的运动方程式(4.22)等价。对式(4.26)求解,即可得到原有系统的响应。这就是传递函数综合法的原理。事实上,对系统的动刚性矩阵式(4.23)可以进行以下变形
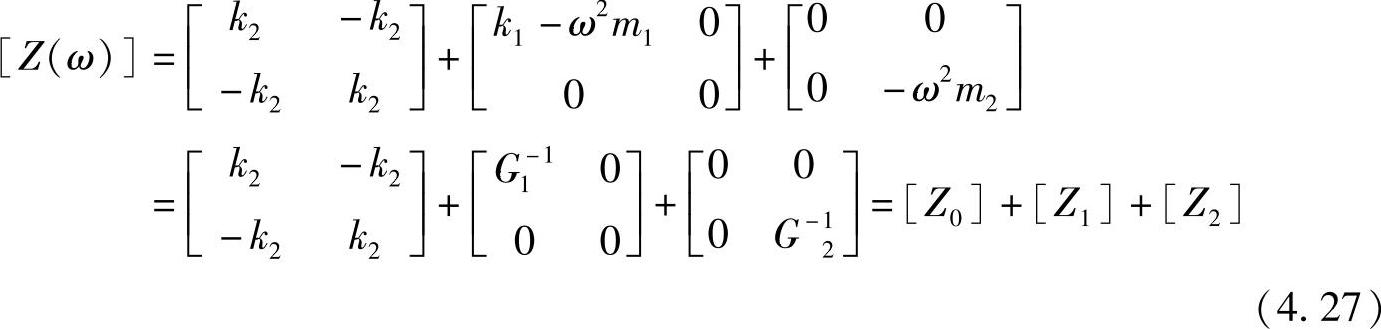
式(4.27)表示,系统的动刚性是由3个项目组合而成的。[Z0]代表剩余结构(这里指结合部的弹簧k2)的动刚性矩阵(剩余结构的自由度就是分析的对象);[Z1]可以看成子结构1在所有分析自由度上表现出来的动刚性矩阵,[Z2]可以看成子结构2在所有分析自由度上表现出来的动刚性矩阵。[Z1]和[Z2]由传递函数所决定,可以通过实验测量得到,也可以通过有限元计算得到。
由以上过程可以看出,传递函数综合法原理上是严密的。但是,如果子结构之间的结合部刚性太大,以至于可以认为是一体的时候,所构成的传递函数矩阵可能接近奇异(不满秩),使得产生较大的数值误差。例如在图4.10所示的例子中,如果弹簧k2的刚性为无限大,则变为单自由度系统。用二自由度系统来描述该系统,会产生奇异矩阵带来的问题。因此,在划分子结构时,最好是从柔性结合部进行分割。
另外应该注意的是,用传递函数组装而成的动刚性矩阵是频率的函数,从中无法分离出质量矩阵和刚性矩阵,因此,不能进行特征值分析。严格来说,不能应用模态法进行求解,只能用直接法求解。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。