



在第2章中,我们以单自由度系统为例,介绍了LQ最优控制理论在振动主动控制中的应用。其实,LQ最优控制理论最适合于多自由度系统的振动控制。多自由度系统的运动方程在状态空间可以表示为

其中, ,
, ,
, ,u={Fc}n×1,C为观测矩阵,通常由1与0组成。这里,[m]、[c]、[k]分别为n×n阶质量矩阵、阻尼矩阵和刚性矩阵。{x}为n×1阶状态向量,{Fc}为n×1阶控制外力向量,[I]表示n×n阶单位矩阵,[0]表示n×n阶0矩阵。在以上定义中,我们假定用与系统自由度相同数目的传感器进行状态测量,用同样数目的执行器进行控制。
,u={Fc}n×1,C为观测矩阵,通常由1与0组成。这里,[m]、[c]、[k]分别为n×n阶质量矩阵、阻尼矩阵和刚性矩阵。{x}为n×1阶状态向量,{Fc}为n×1阶控制外力向量,[I]表示n×n阶单位矩阵,[0]表示n×n阶0矩阵。在以上定义中,我们假定用与系统自由度相同数目的传感器进行状态测量,用同样数目的执行器进行控制。
如果上述方程的自由度数不是很高(如n<10),则控制系统设计直接可以在物理坐标上进行。但是,一般我们面对的要么是实际的连续体力学结构,要么是大规模的有限元数学模型,自由度数目很大。而控制系统所依赖的都是数量有限的传感器和执行器,对于大规模系统,要检测出所有状态量(x, )并加以控制显然是不可能的。为了有效地设计反馈控制系统,首先应建立低阶振动系统的模型。
)并加以控制显然是不可能的。为了有效地设计反馈控制系统,首先应建立低阶振动系统的模型。
在3.4.1节中,我们介绍了利用模态法解耦并降阶处理频率响应的计算方法。这里,把这一方法引入到控制设计中,即对模态实施控制。为了进行模态控制设计,首先应把系统状态方程转换到模态坐标上去。利用坐标变换式(3.22),可得

其中, ,
, 。[ϕ]为系统的n×n阶模态形状矩阵,δ为模态状态向量。将式(3.81)代入式(3.80)并进行变形,可得
。[ϕ]为系统的n×n阶模态形状矩阵,δ为模态状态向量。将式(3.81)代入式(3.80)并进行变形,可得

这里

其中,[M]=[ϕ]T[m][ϕ]为模态质量矩阵,[C]=[ϕ]T[c][ϕ]为模态阻尼矩阵,[K]=[ϕ]T[k][ϕ]为模态刚性矩阵。这样,就得到了在模态坐标上表示的状态方程。
对于方程式(3.82)所代表的线性系统来说,最优控制问题是使以下2次型评价函数达到最小(Least Quadratic cost function)

其中,Q为2n×2n对角矩阵,R是n×n对角矩阵。如果Q为半正定矩阵,R为正定矩阵,且已知系统(3.82)是可控的,则最优控制向量由以下状态反馈来决定
u(t)=-Kδ(t) (3.83)
其中,增益矩阵K(n×2n)由下式决定

这里,P为以下黎卡提方程的对称正定解(2n×2n)

将式(3.83)代入式(3.82),可得模态坐标上的闭环系统的状态方程为

该方程的解为

δ0为初始模态状态量。闭环系统的特征方程为A-KB=0,其根就是特征值。
前面已经说过,对于比例阻尼的情况,转换到模态坐标上的系统方程将变为非耦合的n个独立的方程。相应地,模态状态空间上的系统矩阵 为对角阵。但是,引入状态反馈后,并不能保证闭环系统矩阵
为对角阵。但是,引入状态反馈后,并不能保证闭环系统矩阵 也为对角阵。也就是说,状态反馈可能把已经解耦的方程重新耦合化。如果闭环系统的矩阵依然为对角阵,即只有模态i的状态量参与模态i的控制,则问题变为各个模态的独立控制(Independent Modal-Space Control,IMSC)。为了更易于理解,我们从状态空间重新回到模态坐标的运动方程
也为对角阵。也就是说,状态反馈可能把已经解耦的方程重新耦合化。如果闭环系统的矩阵依然为对角阵,即只有模态i的状态量参与模态i的控制,则问题变为各个模态的独立控制(Independent Modal-Space Control,IMSC)。为了更易于理解,我们从状态空间重新回到模态坐标的运动方程
[ϕ]T[G][ϕ]{δ}=[ϕ]T{Fc} (3.84)
其中,[G]=-ω2[m]+jω[c]+[k]。假定控制力向量由以下状态反馈得到
{Fc}=[H]{x}=[H][ϕ]{δ}
于是式(3.84)成为
[ϕ]T[G][ϕ]{δ}=[ϕ]T[H][ϕ]{δ}
对于比例阻尼系统,[ϕ]T[G][ϕ]为对角阵。对于IMSC的情况,[ϕ]T[H][ϕ]也为对角阵,于是可以得到
[ϕ]T([G]-[H])[ϕ]{δ}=0 (3.85)(https://www.xing528.com)
式(3.85)为闭环系统的特征方程。这个关系表明,模态独立控制(IMSC)只是改变原有系统的特征值(阻尼及固有频率),并不改变其特征向量,即模态形状。
进一步考虑闭环系统的频率响应函数。在外力作用下的闭环系统的强迫振动方程为
[ϕ]T([G]-[H])[ϕ]{δ}=[ϕ]T{F}
假定激励力作用在a点,响应观察点在b点,参考式(3.30)可得

其中,Gi={ϕi}T[G]{ϕi},Hi={ϕi}T[H]{ϕi}。图3.23为其示意图。
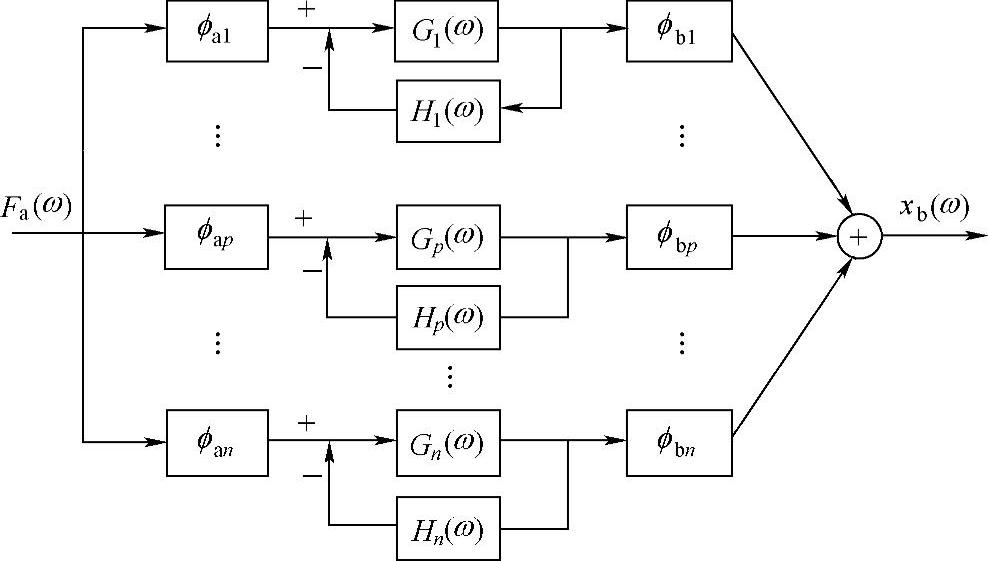
图3.23 具有模态状态反馈的闭环系统的频率响应计算流程
以上虽然阐述了模态控制的原理,并没有考虑如何实现的问题。尽管每个模态可以单独控制,实际中不可能也没必要对每一个模态都控制,因此应该对式(3.82)所示的系统进行降阶处理。
这里假定只对前p阶模态进行控制,并且在r个位置测量振动,在q个位置进行控制(即使用r个传感器和q个执行器)。由于结构响应主要由低阶模态决定,可以近似地认为下列变换关系成立
{x}n×1=[ϕ]n×p{δ}p×1 (3.87)
其中,[ϕ]n×p是由前p阶模态的模态向量得来的。也就是说,模态自由度可以由n阶降为p阶。相应地,模态状态向量δ的长度变为2p,Φ矩阵变为2n×2p阶。
由r位置测量到的r个速度和r个位移,可以构成长度为2r的输出响应向量y。
于是,根据响应方程式(3.82b),可以估计出模态状态向量为

其中,E=(ΦTCTCΦ)-1(CΦ)T为2p×2r阶变换矩阵,C为由1与0组成的2r×2n阶观测矩阵。此外,定义由q个执行器构成的长度为q的作用力向量为w(t),则方程(3.82a)中的长度为n的名义上的控制力向量可以由下列变换得到
u(t)=Tw(t) (3.89)
这里,T为由0和1构成的n×q阶变换矩阵。
经过以上处理,模态坐标下的状态方程为

其中,系统矩阵为

LQ最优控制的2次型评价函数成为

其中,加权矩阵Q为2p×2p对角矩阵,R是q×q对角矩阵。求解相应的黎卡提方程,可得q×2p阶反馈增益矩阵K。实际的最优控制向量由以下状态反馈来决定
w(t)=-Kδ(t) (3.91)
以上介绍了模态控制的实际实现方法。显然,传感器和执行器(激振器)不能设置在对象模态的节点位置,否则,该模态将不可观测或者不可控制。对于模态控制来说,模态形状在一个或几个点上受到控制力的抑制,则整个模态将会得到控制。因此,用较少的激振器可以控制远多于其数目的模态。但是对于检测模态变形的传感器的设置来说,其个数应能反映出对象模态的变形特征。例如如果要对悬臂梁的第4阶模态进行反馈控制,则至少应选4个传感器(见图3.24)。一般来说,在某个方向上应布置的传感器的最少个数等于对象模态在该方向上的节点(线)个数加上1。
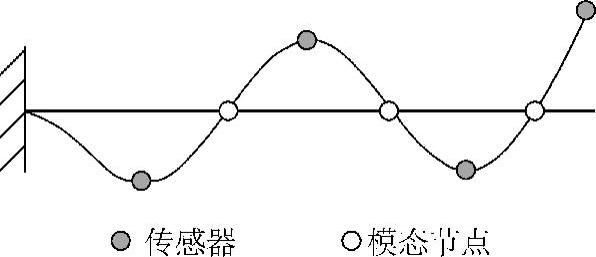
图3.24 传感器的最少个数与模态形状的关系示意图
最后需要指出的是,由式(3.91)决定的控制力虽然目的在于控制前p个模态,其信号中不可避免地会含有p阶模态频率以上的频率成分。因此,实际作用在结构上的控制力还会对p阶以上的高阶模态发生作用。如果高阶模态的振动与控制力的相位差小于90°,则高阶模态也会得到某种程度的抑制;但如果相位差大于90°,甚至正好反相,则高阶模态的振动不但得不到控制,反而振幅越来越大,呈发散趋势。这种现象称为“溢出”现象(Spillover)。为了避免这种问题的发生,通常采用低通滤波的方法对得到的控制力信号进行处理。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。