



我们在2.3节介绍了传统的动力吸振器的原理。这种利用附加质量的被动式动力吸振器对于稳定的窄带振动很有效,但当系统特性发生变化以至于偏离最优同调频率时,减振效果会显著恶化,特别是当附加质量不大时更是如此。此外,当动力吸振器的质量给定后,最大的减振效果也就确定。要想获得更大的减振效果,只有增大吸振器的质量,这又与轻量化的要求相矛盾。为了解决这些问题,可以采用主动动力吸振器,如图2.61所示。
考虑到控制器在主振动系上施加作用力的同时,反作用力作用在吸振器上,该系统的运动方程为(这里,u为控制力信号)

对上述运动方程进行变形

引入以下变量
质量比:μ=m/M
主振动系的固有频率:
阻尼比:
吸振器的固有频率:
阻尼比:
进一步整理,得

定义状态向量为

可得系统的状态方程为(https://www.xing528.com)
其中,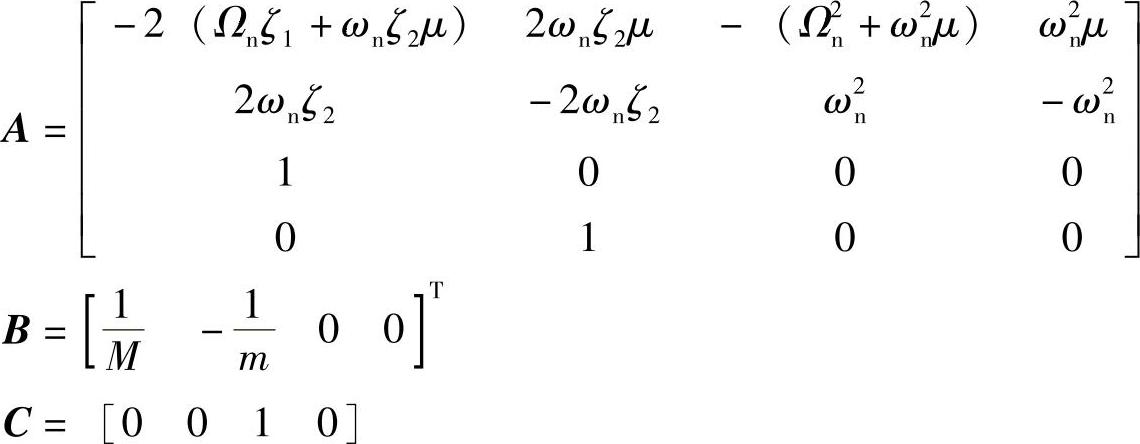
根据最优控制理论,控制信号u(t)应使以下二次型评价函数达到最小

这里取 ,则
,则 ,即把主振动系的动能作为最小化目标,通过求解Riccati方程,可以得到最优反馈增益矩阵。
,即把主振动系的动能作为最小化目标,通过求解Riccati方程,可以得到最优反馈增益矩阵。
作为举例,假设主振动系的阻尼很小,可以忽略,吸振器与主系的质量比μ=0.1,图2.61中的吸振器的弹簧刚性k由最佳同调频率决定[式(2.26)],阻尼系数c由最佳阻尼决定[式(2.33)]。也就是说,被动动力吸振器本身处于最优设计状态。在此基础上,考察主动动力吸振器的效果。
图2.62为主振动系在冲击作用下的时域响应。其中,实线是被动动力吸振器单独作用下的结果,其余为在此基础上施加主动控制的结果。图2.63为主振动系的频率响应曲线。这里,沿用2.3节的表示方法,横轴为频率比,纵轴为振幅倍率。可见,利用主动控制可以大大提高振动的控制效果,而不需要增加吸振器的质量。此外,实践表明,即使主系的特性发生一定的变化,该方法仍能维持良好的控制效果。
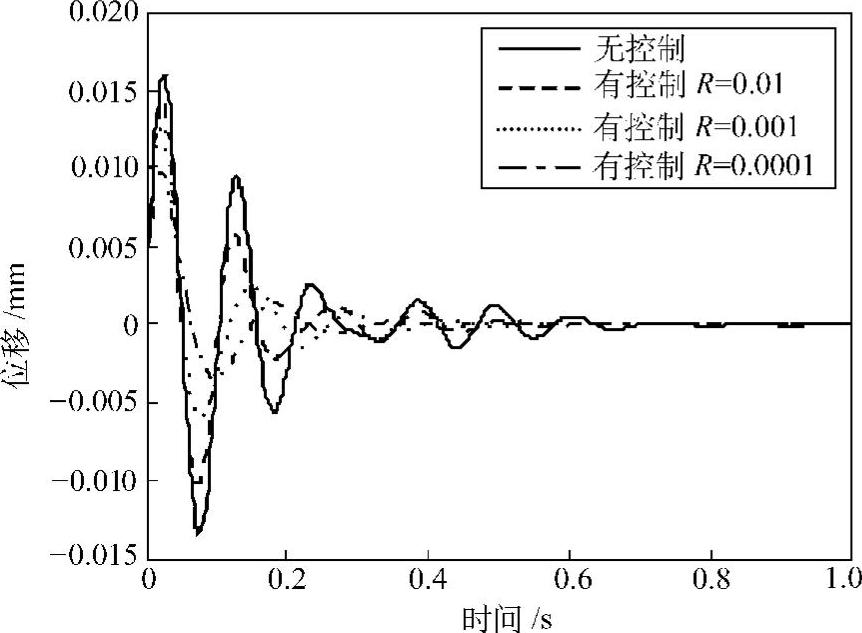
图2.62 主动动力吸振器作用下的主振动系的时间响应
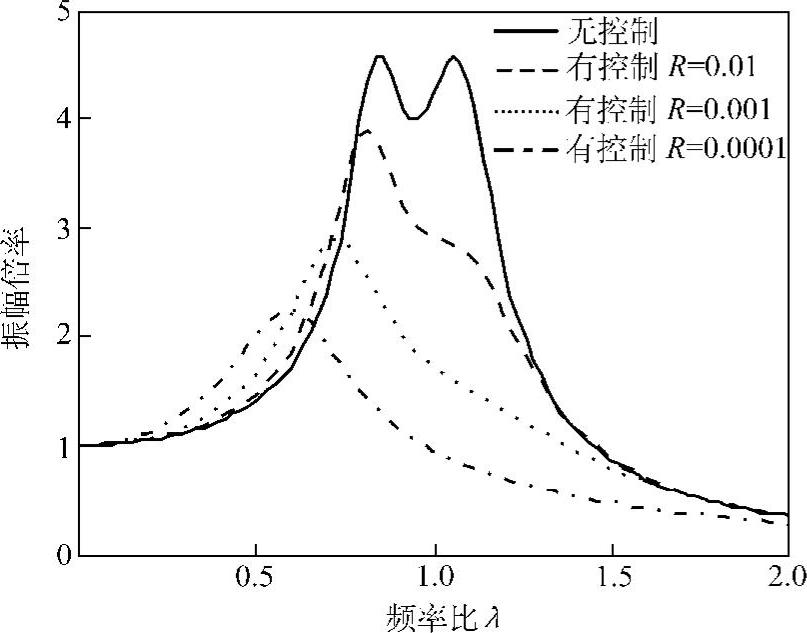
图2.63 主动动力吸振器作用下的主振动系的频率响应
以上介绍的是动力吸振器的主动控制方法。对于实际的主动动力吸振器设计,还应考虑元器件本身的性能及信号检测方法。在实际中,把吸振器与主振动系之间的相对位移作为状态反馈量可能更方便,即
xd=x2-x1
这时,需要对状态方程作相应的变形。但是,控制设计方法是一样的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。