



这里,以单自由度系统的振动控制为例,对LQ最优控制的设计过程进行说明。
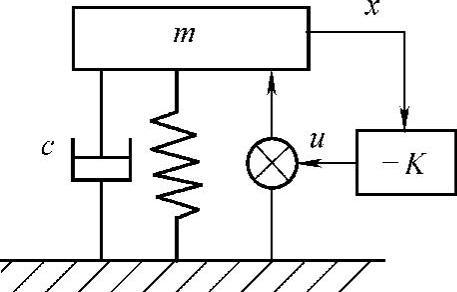
图2.58 基于状态反馈的单自由度振动控制模型
基于状态反馈的单自由度振动控制系统如图2.58所示。同时考虑上外力F(t)与控制力u(t)的运动方程为

控制力u(t)是由位移、速度、加速度等状态量的反馈构成的,为

代入运动方程,得

可见,状态反馈控制其实是通过调整原有系统的特性(质量、阻尼、刚性)来抵御外部激励的。因此,在控制系统设计阶段,可以暂不考虑外部激励的影响,而只针对系统本身的特性来进行。这样,仅在控制力作用下的系统的运动方程为

所对应的状态方程为

其中, ,
, ,
, ,
, 系统的响应方程为
系统的响应方程为
y(t)=Cx(t)(https://www.xing528.com)
选取C=[01],即可得到位移响应。
根据LQ最优控制理论,控制信号u(t)应使以下二次型评价函数达到最小

这里取 ,则评价函数变为
,则评价函数变为 。可见,最优控制的目标是使系统的动能最小。由于只有一个控制力,R是一个标量,通过调节它的值,可以改变控制能量的大小以及控制效果。
。可见,最优控制的目标是使系统的动能最小。由于只有一个控制力,R是一个标量,通过调节它的值,可以改变控制能量的大小以及控制效果。
图2.59是系统的单位脉冲响应,图2.60是系统的频率响应函数。可见,状态反馈控制改善了系统的动态性能。
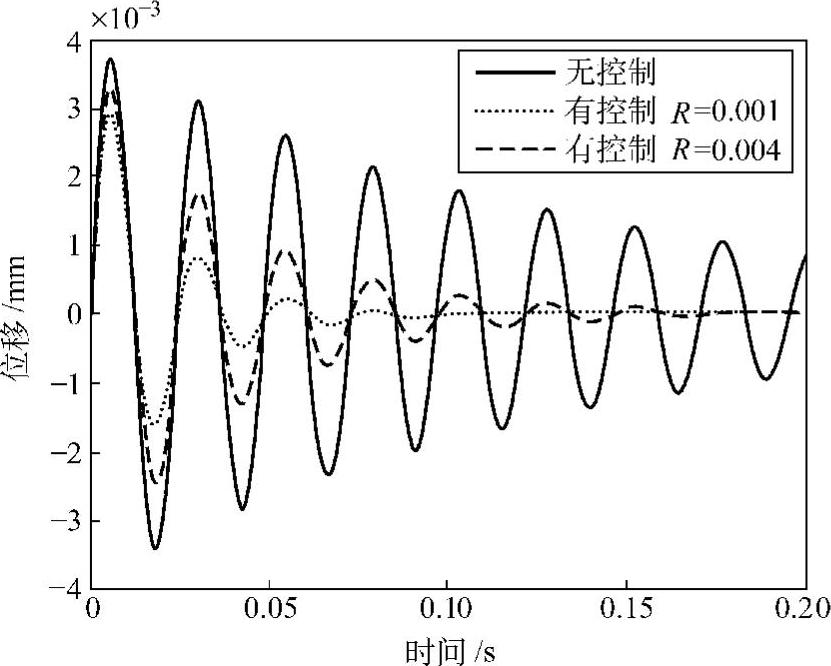
图2.59 单自由度系统的冲击响应函数
当R=0.004时,由式(2.49)求得的最优增益矩阵为K=[11.80.0];当R=0.001时,求得的最优增益矩阵为K=[27.30.0]。由于对应于位移状态量的增益等于0,控制效果是由速度反馈来增加系统的阻尼而实现的,而且R越小,速度反馈增益越大。
进一步考察可知,如果选取 ,则评价函数变为
,则评价函数变为 Ru2(t))dt,即把系统的弹性势能作为优化目标。这时,要达到同样的控制效果,同时需要速度反馈和位移反馈,而且反馈增益很大,也就是说,所需要的控制能量很大。因此,对于振动控制来说,在选取加权矩阵Q时,最好是把与速度项对应的值选为1,其余选为0。
Ru2(t))dt,即把系统的弹性势能作为优化目标。这时,要达到同样的控制效果,同时需要速度反馈和位移反馈,而且反馈增益很大,也就是说,所需要的控制能量很大。因此,对于振动控制来说,在选取加权矩阵Q时,最好是把与速度项对应的值选为1,其余选为0。
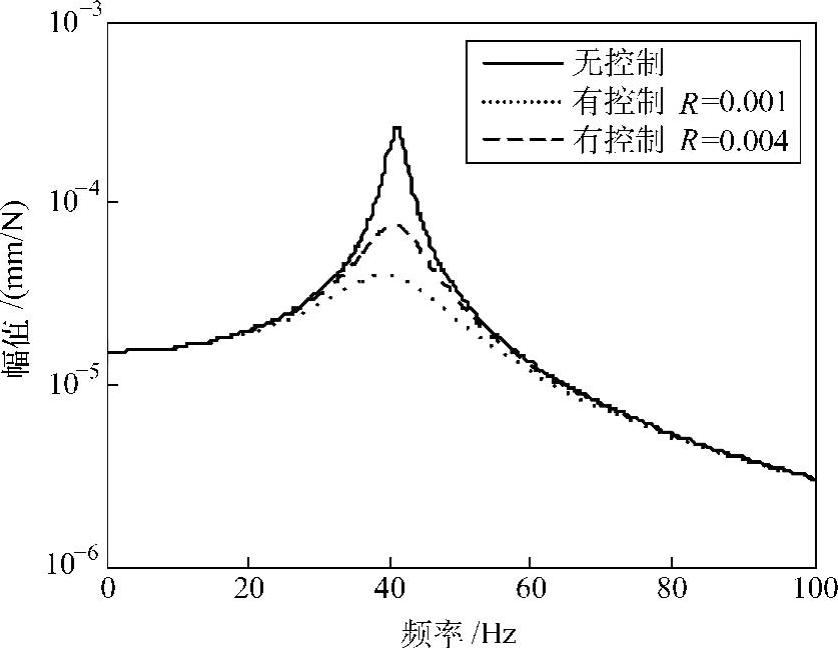
图2.60 单自由度系统的频率响应函数
上述基于LQ最优控制理论的振动控制设计方法,可以很方便地推广到多自由度系统的振动控制中。
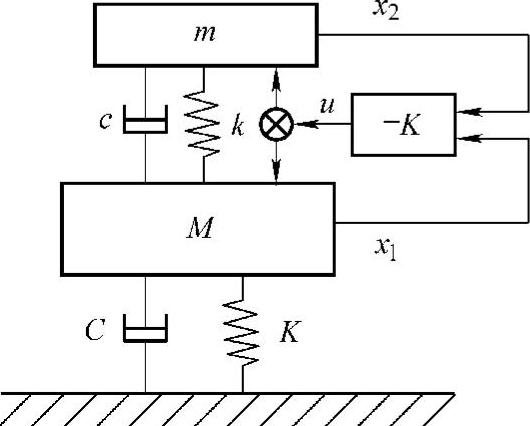
图2.61 主动动力吸振器的二自由度模型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。