



对于多输入多输出系统(Multiple Input Multiple Output,MIMO),应用上述基于传递函数的控制系统设计方法很复杂,基于状态空间的现代控制理论则为这类问题提供了有效的工具。现代控制理论所涉及的内容很多,这里主要介绍振动控制中常用的最优控制理论。
1.状态空间(State-Space)
对于一个单自由度振动系统,运动方程为

变形为
引入等式
把以上两个方程结合起来,可以写成以下矩阵的形式

令 ,
, ,
, ,
,
则得

式(2.45)称为状态方程,x为状态向量,A、B为状态矩阵。另外,系统的响应可以用输出向量方程式(2.46)表示
y(t)=Cx(t)+Du(t) (2.46)
C为观测矩阵,通常由1与0组成;D一般为0矩阵。方程式(2.45)和式(2.46)合起来称为线性系统在状态空间上的描述。
以上的状态方程虽然是从单自由度系统出发得到的,但其形式具有普遍性。对于多自由度系统,同样可以用方程式(2.45)和式(2.46)来表述。
2.状态的可控性与可观测性
线性系统的可控性与可观测性是现代控制理论的重要概念。
所谓可控性,是指对于方程式(2.45)所示的系统,如果控制函数u(t)可以把系统的某个状态量从初始值x0转移到x1,则称系统的该状态量是可控的。如果每个状态量都可控,则称系统的状态完全可控。可见,状态量可控性反映了系统输入控制其状态的能力。
所谓可观测性,是指对于方程式(2.46)所示的系统响应,如果控制函数u(t)=0,在任意时间段上,对于系统的某个非零初始状态量x0,响应y(t)≠0,则称这个状态可观测;否则,称为不可观测。如果除了零状态以外没有不可观测的状态,则称系统是完全可观测的。显然,状态量可观测性代表了系统输出反映其状态的能力。
这里以振动控制为例,对可控性与可观测性的物理含义进行说明。如果把激振器安装在振动的节点位置(振幅为0的部位),则控制力无法改变结构的振动状态,即不可控;同样,如果把加速度传感器安装在振动的节点位置,则无法测量到振动的水平,即不可观测。
可控性及可观测性的代数判断准则为:设线性系统的状态矩阵A为n×n的矩阵,B为n×k的矩阵,C为r×n的矩阵,可构成以下新的矩阵
可控制性矩阵:M=[BABA2B…An-1B]n×nk
可观测性矩阵:N=[CTATCT(A2)T CT…(An-1)TCT]n×nr如果矩阵M的秩(rank)为n,则称系统可控;如果矩阵N的秩为n,则称系统可观测。
3.LQ最优控制理论(Optimal Control)
对于方程式(2.45)所代表的线性系统来说,最优控制问题是使以下二次型评价函数达到最小(Least Quadratic Cost Function)。(https://www.xing528.com)

其中,Q、R是系数矩阵。如果Q为半正定矩阵、R为正定矩阵,且已知系统是可控的,则最优控制向量由以下状态反馈来决定
u(t)=-Kx(t) (2.48)
其中增益矩阵K由式(2.49)决定
K=R-1BTP (2.49)
这里,P为下列Riccati方程的对称正定解
ATP+PA-PBR-1BTP+Q=0 (2.50)
将式(2.48)代入式(2.45),可得闭环系统的状态方程为

该方程的解为

x0为初始状态量。闭环系统的特征方程为A-KB=0,其根就是特征值。若所有特征值均具有负实部,则闭环系统稳定。
最优控制的关键是状态反馈。可以证明,只要系统可控且可观测,则可以通过状态反馈任意改变系统的特征值;即使原有系统的特征值具有正实部,即不稳定,也可以通过适当的反馈增益矩阵K使新系统变得稳定。图2.57是引入状态反馈的控制系统的流程图。
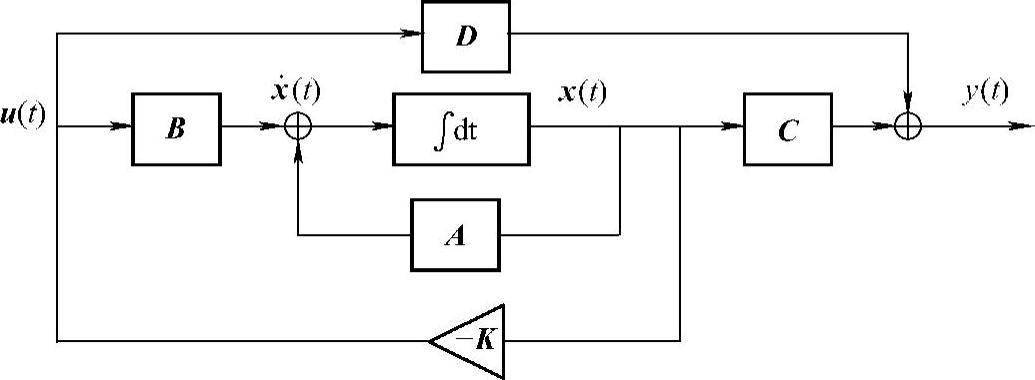
图2.57 状态空间的控制系统
以上就是LQ最优控制理论的基本框架。本来求解Riccati方程不容易,但现在借助于Matlab可以方便地得到它的解。对于振动控制来说,评价函数(2.47)的物理含义可以理解为使得振动能量(第一项)最小的同时,使控制能量(第二项)也要最小。遗憾的是,关于系数矩阵Q、R的选取,尚无一个系统的方法,现在主要是利用计算机仿真进行调整。一般地,R的值越小,控制的效果越好,但耗能也越大。
4.准最优控制理论(Sub-optimal Control)
LQ最优控制理论的前提是建立在所有状态量的反馈基础之上的。也就是说,要获得最优控制效果,必须测量到所有的状态量并反馈回去。对于实际的控制系统设计来说,这是一个苛刻的条件。由于传感器设置场所的限制以及成本问题,可能无法或者没有必要获得所有状态量的信息。在这种情况下,可以应用准最优控制理论代替LQ最优控制理论。
假设可以测量到的状态量为z=Sx,S为由0和1构成的变换矩阵,则可以构成以下状态反馈
u(t)=-Ksz(t) (2.53)
Ks为准最优控制的反馈增益矩阵。严密求解Ks很复杂,通常利用最小范数的方法决定Ks,即寻找Ks使它与LQ最优控制的增益矩阵K的差‖Ks-K‖最小。其结果为
Ks=KST(SST)-1 S (2.54)
这个结果相当于把LQ最优控制的增益矩阵中与测量不到的状态量所对应的值去掉而已。所以,其设计过程仍然是先根据LQ最优控制理论求得K,再通过式(2.54)的变换得到Ks。
这样,虽然可以很方便地处理状态量测量不全的问题,由式(2.54)决定的部分状态反馈并不能像完全状态反馈那样保证系统的稳定性。所以,在实际应用中应加以注意。一般情况下,应用由式(2.54)决定的准最优控制不会有大的问题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。