



这里,我们来探讨系统具有什么样的特性时,会具有把运动能量转移为振动能量的能力。由于讨论的是系统本身的固有特性,可以使用自由振动的运动方程式(1.18)。
假设刚性变为负值,则运动方程可写为

令x=eλt,λ为常数,称其为方程的特征值。代入方程式(1.84),可求得

因此,可得2个特解 、
、 。于是,该方程的通解为
。于是,该方程的通解为

其中,C1、C2为两个由初始条件确定的常数。假设初始条件为x(0)=x0、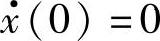 ,则由此条件可求得两个常数为
,则由此条件可求得两个常数为

代入式(1.85)整理,可得位移响应为

如图1.34a所示为ωn=4π,ζ=0.05,x0=1时的图像。显然,这不是一个振动响应。由此可知,负的刚性只会使物体越来越远离其平衡位置,这是一种不稳定的情况,称之为系统的静不稳定性。负刚性相当于系统具有负的特征值-ω2n。
我们再来探讨阻尼为负的情况。此时,运动方程为(https://www.xing528.com)

将式(1.27)中的阻尼比改变符号,即可得以上方程的解为

其中, 。取ωn=4π,ζ=0.05,x0=1,v0=0,上式的图像如图1.34b所示。可见,这是一个发散的振动现象,称之为系统的动不稳定性。
。取ωn=4π,ζ=0.05,x0=1,v0=0,上式的图像如图1.34b所示。可见,这是一个发散的振动现象,称之为系统的动不稳定性。
把方程式(1.87)变形为

形式上,这相当于一个无阻尼系统在动态激励力 作用下的强迫振动。由于这个激励力依存于振动本身,所以是一个自激振动。可见,系统具有负阻尼是自激振动发生的内在原因。由此可以推测,因为琴弓与琴弦之间存在负阻尼,拉提琴时才会把琴弓的一部分运动能量转移为琴弦的振动能量。
作用下的强迫振动。由于这个激励力依存于振动本身,所以是一个自激振动。可见,系统具有负阻尼是自激振动发生的内在原因。由此可以推测,因为琴弓与琴弦之间存在负阻尼,拉提琴时才会把琴弓的一部分运动能量转移为琴弦的振动能量。
自激振动是一个动不稳定现象。需要说明的是,在讨论动稳定问题时,是以静稳定为前提条件的。换言之,对于静不稳定系统来说,讨论动稳定问题没有意义。关于稳定性问题,通常通过研究系统的特征值来判断。如果特征值λ是正实数,则由x=eλt可知,随着时间的增加位移呈现单调增长趋势,为静不稳定;当特征值λ是负实数时,系统为静稳定。如果λ是复数,则可能涉及动不稳定问题。把特征值λ表示为λ=α+jβ,这里,α和β为实数。如果α≤0,β≠0,则为静稳定动稳定系统;如果α>0,β≠0,则为静稳定动不稳定系统。有阻尼或无阻尼的自由振动系统就是一个典型的动稳定系统[见式(1.23)]。
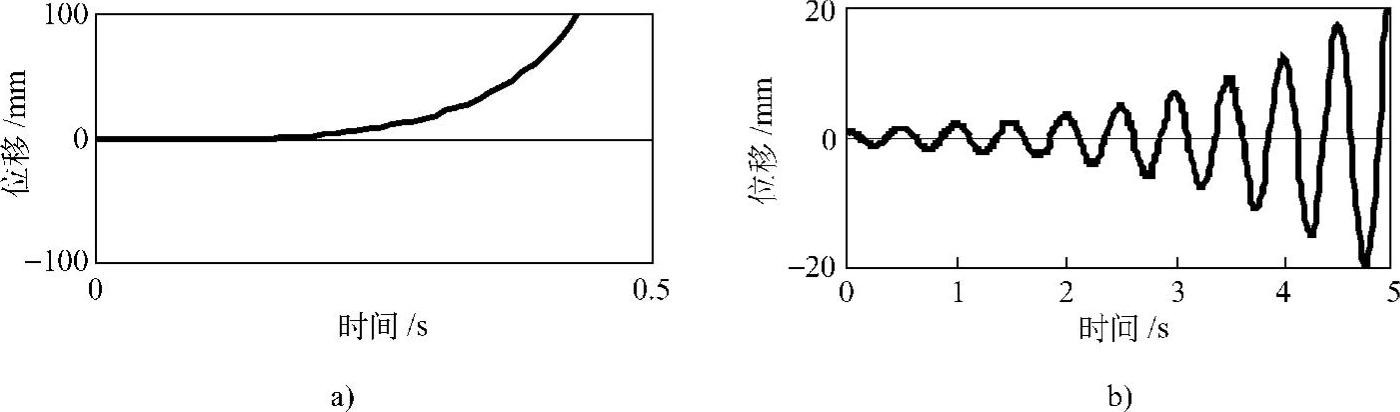
图1.34 单自由度系统的不稳定性
a)负刚性引起的静不稳定性 b)负阻尼引起的动不稳定性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。