



单自由度无阻尼系统的振动由微分方程式(1.1)所决定。略去时间变量t,该方程可以写为 或
或 ,其中,
,其中, 。这个方程有两个显而易见的特解:x=sinωnt,x=cosωnt。所以,该方程的通解为
。这个方程有两个显而易见的特解:x=sinωnt,x=cosωnt。所以,该方程的通解为

A称为振幅,φ称为相位,二者由初始条件所决定。假设初始时(t=0)位移为x0,速度为v0,将该条件代入位移方程式(1.5)及其微分(速度)可以求得

例如把图1.1的物体拉开x0然后释放(初始速度为0),则有A=x0,φ=π/2。此时,物体的位移为

可见,无阻尼单自由度系统的振动响应可以用一个正弦(或余弦)函数来表示,其振动周期为 。由于这个周期仅取决于系统的质量与弹簧刚性,称之为固有周期(Natural Period),其倒数称为固有频率fn(Natural Frequency,单位为Hz)。相应地,ωn称为固有角频率(Natural Angular Frequency,[rad/s])。这种振动称为简谐振动或单频振动(Simple Harmonic Vibration)。
。由于这个周期仅取决于系统的质量与弹簧刚性,称之为固有周期(Natural Period),其倒数称为固有频率fn(Natural Frequency,单位为Hz)。相应地,ωn称为固有角频率(Natural Angular Frequency,[rad/s])。这种振动称为简谐振动或单频振动(Simple Harmonic Vibration)。
对于简谐振动来说,用一个正弦或余弦函数足以描述其响应。但是在研究复杂的振动形式时,三角函数并不是最好用的数学表达方式。这里,我们介绍用复数形式表示振动的方法。应用欧拉公式e±jθ=cosθ±jsinθ, ,上式可以变形为
,上式可以变形为

Re表示取实部。可见,简谐振动可以用一个复指数的实部来表示,复指数可以用复平面上的一个向量来表示。图1.3表示一个长度为A的向量在复平面上的逆时针方向以ωn的角速度旋转时的情况。很显然,它在实轴上的投影就是一个简谐振动x(t)=Acos(ωnt)。(https://www.xing528.com)
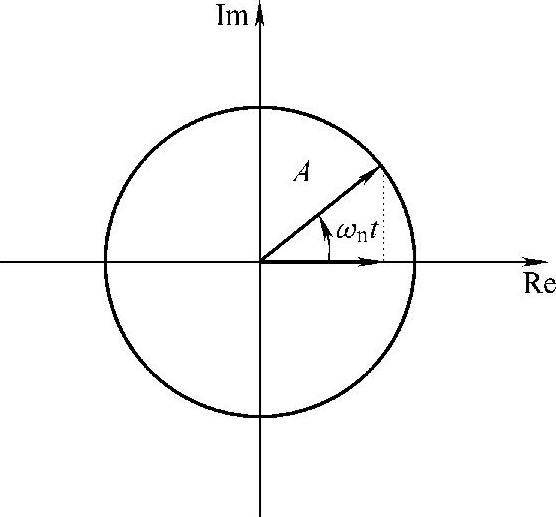
图1.3 简谐振动的向量表示形式
为了方便,通常略去实部,而直接用复指数形式来表示一个单频振动,这种形式也称为极坐标表示形式。这在数学演绎推导过程中毫无问题,只要对最终结果取实部即可。简谐振动的位移、速度和加速度用极坐标形式表示,有以下关系
如图1.4 所示为初始位移为1mm,初始速度为0,固有频率为2Hz的单自由度系统的自由振动的位移、速度和加速度曲线。速度与位移呈现90°的相位差,而加速度与位移相位刚好相反。这里,速度由位移的1阶微分得到,加速度由位移的2阶微分得到。另外,为了便于与位移及速度同图表示,加速度的单位取为Gal(1Gal=1cm/s2)。结合式(1.6)可知,给一个向量乘上虚数单位j相当于把这个向量前移90°相角,而幅值保持不变。
最后,对频率及角频率的关系做一说明。图1.3中,向量转过一圈所用的时间定义为周期。频率定义为周期的倒数,表示每秒钟内转过的圈数,单位为1/s。所谓角频率,其实是向量旋转的角速度,即每秒转过的角度,单位为rad/s。因此,角频率与频率的关系为ωn=2π fn。
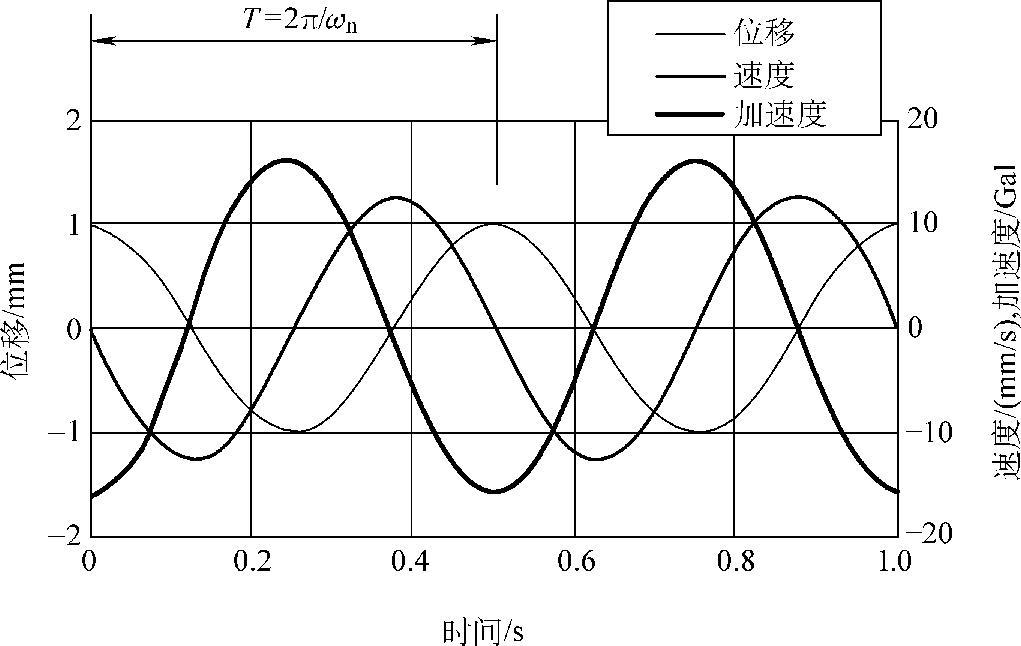
图1.4 无阻尼单自由度系统的自由振动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。