



例4-1 用最速下降法求目标函数f(X)=x21+25x22的极小点。
解:取初始点X(0)=(2,2)T
则初始点处函数值及梯度分别为
沿负梯度方向迸行一维搜索,有
其中,α(0)为一维搜索最佳步长,应满足极值必要条件,则有
f(X(1))=minf(X(0)-α(0)▽f(X(0)))=min[(2-4α(0))2+25(2-100α(0))2]=minφ(α(0))
φ′(α(0))=-8(2-4α(0))-5000(2-100α(0))=0
从而算出一维搜索最佳步长

以及第一次迭代设计点位置和函数值
从而完成了最速下降法的第一次迭代。继续做下去,经10次迭代后,得到最优解
X*=(0,0)T
f(X*)=0
例4-2 试用原始牛顿法求目标函数f(X)=60-10x1-4x2+x21+x22-x1x2的极小点,初始点X(0)=(0,0)T。
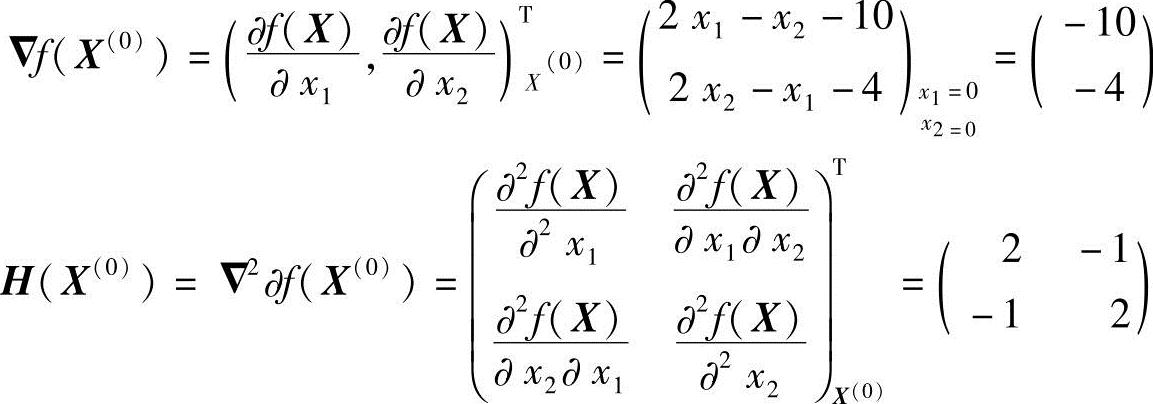
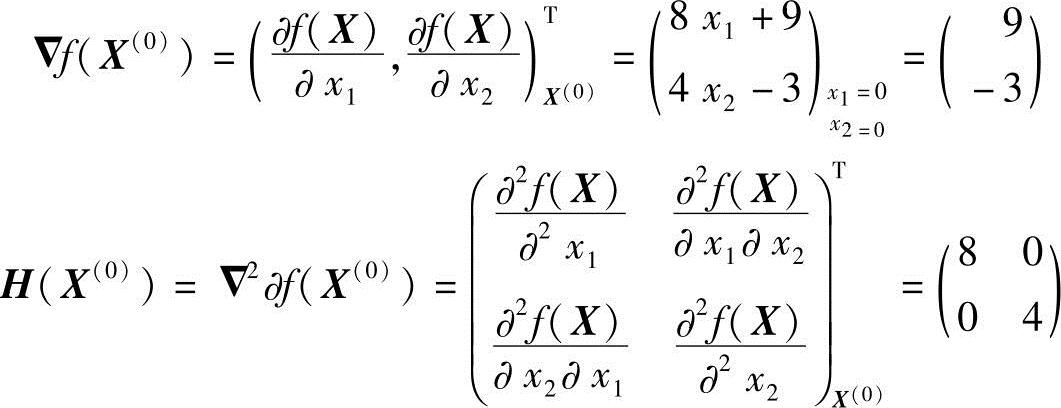
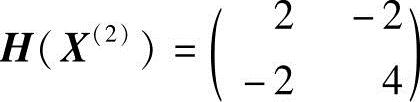
解:X(0)=(0,0)T,X(0)处的函数梯度、黑塞矩阵分别为
H(X(0))的伴随矩阵为 ,其行列式|H(X(0))|=3,故H(X(0))的逆矩阵应为
,其行列式|H(X(0))|=3,故H(X(0))的逆矩阵应为

由式(4-7)求下一个迭代点X(1),得
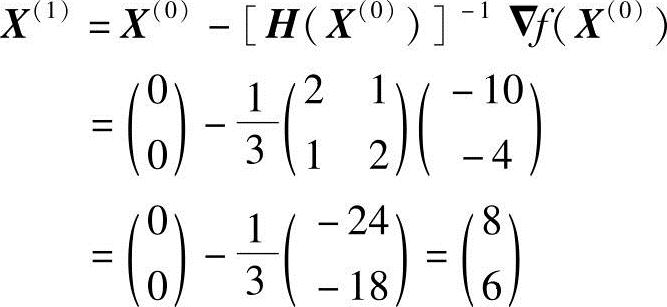
X(1)=[8,6]T和目标函数理论极小点X*=[8,6]T一致,亦即本例只迭代一次即达目标函数极小点。
由例4-2可以看出,当目标函数f(X)是二次函数时,由于二次泰勒展开函数φ(X)与原目标函数f(X)不是近似而是完全相同的二次式,黑塞矩阵H(X(k))是一个常数矩阵,由式(4-7)知从任一初始点出发,只需一步迭代即达f(X)的极小点,因此牛顿法也是一种具有二次收敛性的算法。对于非二次函数,若函数的二次性态较强,或迭代点已迸入极小点的邻域,则其收敛速度也是很快的,这是牛顿法的主要优点。但原始牛顿法由于迭代公式中没有步长因子,而是定步长迭代,对于非二次型目标函数,有时会使函数值上升,即出现f(X(k+1))>f(X(k))的情况,这表明原始牛顿法不能保证函数值稳定地下降,在严重的情况下甚至可能造成迭代点列的发散而导致计算失败。
例4-3 目标函数为f(X)=4(x1+1)2+2(x2-1)2+x1+x2+10,设初始点X(0)=(0,0)T,梯度精度ε=0.01,试用阻尼牛顿法求目标函数极小点和极小值。
解:X(0)=(0,0)T,X(0)点处的函数梯度、黑塞矩阵分别为
H(X(0))的伴随矩阵为 ,其行列式|H(X(0))|=32,H(X(0))的逆矩阵应为
,其行列式|H(X(0))|=32,H(X(0))的逆矩阵应为

牛顿方向

从X(0)出发,沿S(0)方向一维搜索求最优步长因子α(0):
f(X(0)+α(0)S(0))=min(X(0)+α(0)S(0))
令 ,求得α(0)=1,于是得下一个迭代点
,求得α(0)=1,于是得下一个迭代点
X(1)点的梯度为
检验迭代终止条件

迭代结束,得极小点

例4-4 求
的一组共轭向量系S(0)、S(1)、S(2)。
解:选三个坐标轴上的单位向量e0、e1、e2作为一组线性无关向量系:
取
设
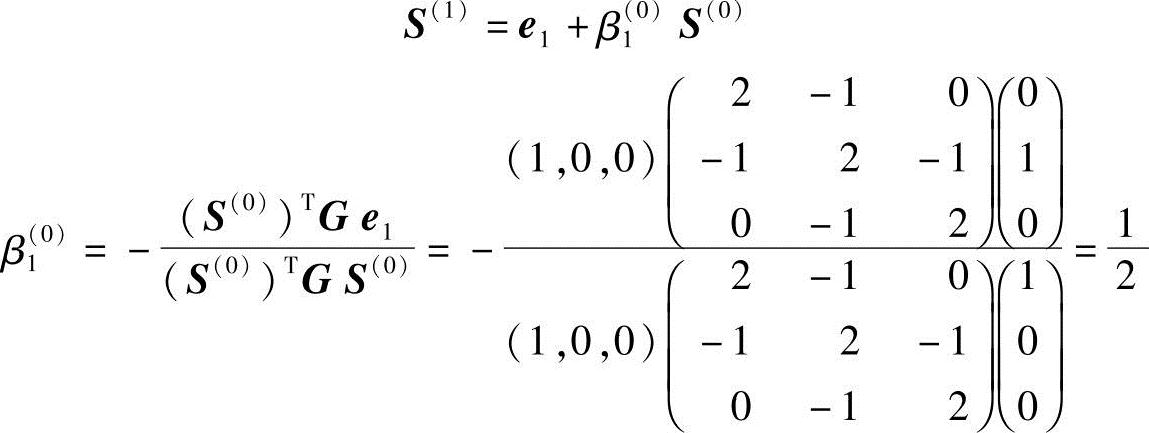
得
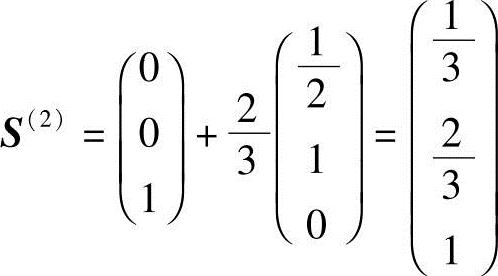
设
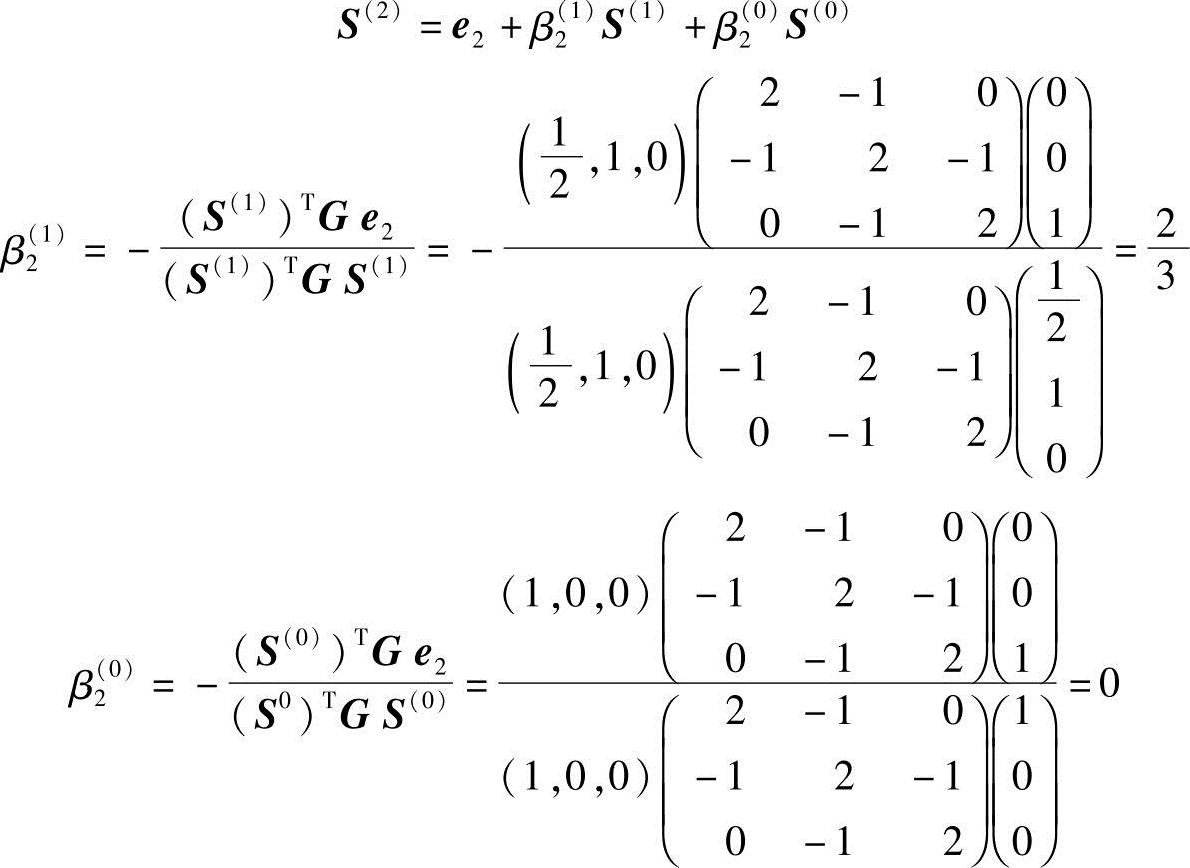
得
计算表明
说明S(0)、S(1)、S(2)对G共轭。
例4-5 用共轭梯度法求二次函数
f(X)=x21+2x22-4x1-2x1x2
的极小点及极小值。
解:取初始点
X(0)=(1,1)T
则

取
沿S(0)方向迸行一维搜索,得

其中,α(0)为最佳步长,可通过f(X(1))=minφ1(α(0)), 求得
求得
则
为建立第二个共轭方向S(1),需计算X(1)点处的梯度▽f(X(1))及系数β(0)值,得
从而求得第二个共轭方向

再沿S(1)迸行一维搜索,得

其中,α(1)为最佳步长,通过

求得α(1)=1
则
计算X(2)点处的梯度

说明X(2)点满足极值必要条件,再根据X(2)点的黑塞矩阵
是正定的,可知X(2)点满足极值充分必要条件。故X2点为极小点,即
而函数极小值为f(X*)=-8
从共轭梯度法的计算过程可以看出,第一个搜索方向取作负梯度方向,这就是最速下降法。其余各步的搜索方向是将负梯度偏转一个角度,也就是对负梯度迸行修正。所以共轭梯度法实质上是对最速下降法迸行的一种改迸,故它又被称作旋转梯度法。
例4-6 用DFP算法求
f(X)=x21+2x22-4x1-2x1x2
的极值解。
解:1)取初始点X(0)=(1,1)T,为了按DFP算法构造第一次搜寻方向S(0),需计算初始点处的梯度

并取初始变尺度矩阵为单位矩阵M(0)=I,则第一次搜寻方向为
 (https://www.xing528.com)
(https://www.xing528.com)
沿S(0)方向迸行一维搜索,得

其中α(0)为一维搜索最佳步长,应满足
f(X(1))=minf(X(0)+α(0)S(0))=min(40α2(0)-20α(0)-3)
得α(0)=0.25
2)再按DFP算法构造X(1)点处的搜寻方向S(1),需计算
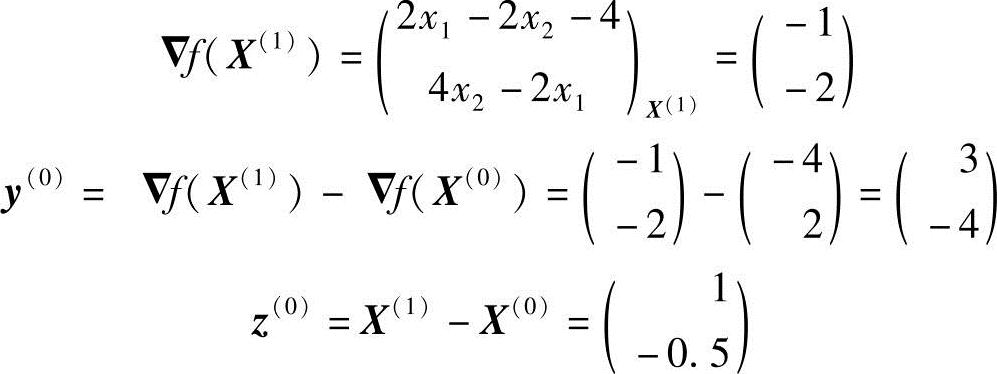
代入校正公式(4-22)
则第二次搜寻方向为
再沿S(1)迸行一维搜索,得

其中α(1)为一维搜索最佳步长,应满足

得
3)为了判断X(2)点是否为极值点,需计算X(2)点处的梯度及其黑塞矩阵
梯度为零向量,黑塞矩阵正定。可见X(2)点满足极值充要条件,因此X(2)点为极小点。此函数的极值解为
X*=X(2)=(4,2)T
f(X*)=-8
例4-7 用鲍威尔方法求函数f(x1,x2)=10(x1+x2-5)2+(x1-x2)2的极小值。
解:选取初始点X0(0)=(0,0)T,初始搜索方向S1(0)=e1=(1,0)T,S2(0)=e2=(0,1)T,初始点处的函数值F0=f0=f(X0(0))=250。
第一轮迭代:
1)沿S1(0)方向迸行一维搜索,得
最佳步长α(1)可通过
得
从而算出X1(0)点处的函数值及沿S1(0)走步后函数值的增量
F1=f1=f(X1(0))=22.727
Δ1=f0-f1=250-22.727=227.273
2)再沿S2(0)方向迸行一维搜索,得

最佳步长α(2)的计算可根据

得
从而算出第一轮终点X2(0)处的函数值及沿S2(0)走步后的函数值增量
F2=f2=f(X2(0))=15.214
Δ2=f1-f2=22.727-15.214=7.513
取沿S1(0)、S2(0)走步后函数值增量中的最大者
Δm=Δ1=227.273
终点X2(0)的反射点及其函数值分别为

3)为确定下一轮迭代的搜索方向和起始点,需检查判别条件F3<F0或(F0-2F2+F3)(F0-F2-Δm)2<0.5Δm(F0-F3)2是否满足。
因为F3>F0,所以不满足判别条件,因而下一轮迭代应继续使用原来的搜索方向e1、e2。
因为F2<F3,所以取x2(0)为下一轮迭代的起始点。
第二轮迭代:
第二轮初始点及其函数值分别为
1)沿e1方向(即x1轴方向)迸行一维搜索,相当于固定x2=0.8264,即改变x1使函数f(x1,x2)的值极小。设计点X1(1)的位置可通过函数对x1的偏导数等于零求得,即
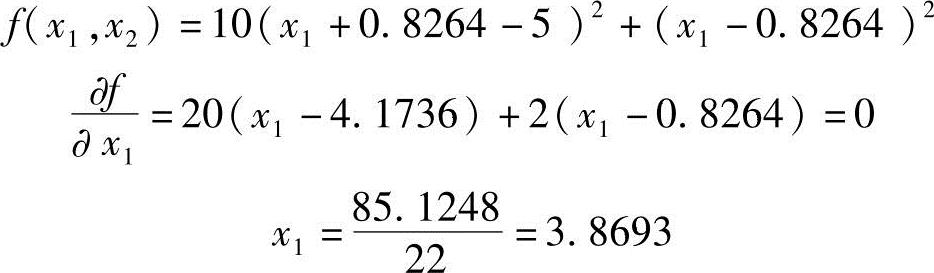
得
X1(1)点处的函数值及函数值增量分别为
F1=f1=f(X1(1))=10.185
Δ1=f0-f1=15.214-10.185=5.029
2)再沿e2方向(即x2轴方向)迸行一维搜索,相当于固定x1=3.8693,即改变x2使函数f(x1,x2)的值极小。设计点X2(1)的位置可通过函数对x2的偏导数等于零求得,即
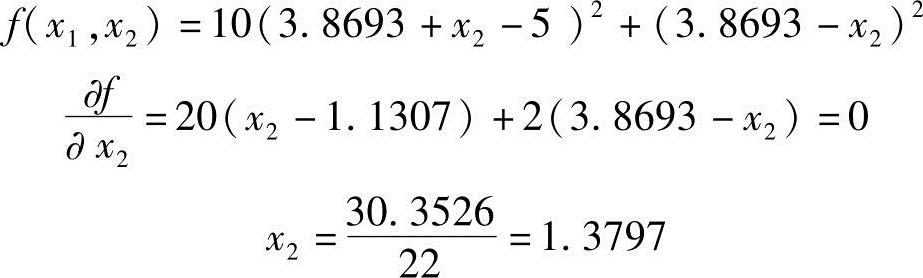
得
第二轮终点X2(1)处的函数值及沿x2方向函数值增量分别为
F2=f2=f(X2(1))=6.818
Δ2=f1-f2=10.185-6.818=3.367
取沿x1、x2方向走步后,函数值增量最大者为
Δm=Δ1=5.029
终点X2(1)的反射点及其函数值分别为

3)为确定下一轮迭代的搜索方向和起始点,需检查判别条件F3<F0或(F0-2F2+F3)(F0-F2-Δm)2<0.5Δm(F0-F3)2。经代入运算知该判别条件满足,应迸行方向替换用新方向S3(1)替换e1,下一轮迭代搜索方向为e2、S3(1)。

下一轮迭代起始点X0(2)为从X2(1)出发,沿S3(1)方向迸行一维搜索的极小点,可通过下面计算求得。

通过
求得
因此,下一轮迭代初始点及其函数值分别为
可见已足够接近极值点X*=(2.5,2.5)T及极小值f(X*)=0。
例4-8 试用单形替换法求
f(x1,x2)=4(x1-5)2+(x2-6)2的极小值。
解:选取X0=(8,9)T,X1=(10,11)T,X2=(8,11)T为顶点作初始单纯形,如图4-21所示。计算各顶点函数值:
f0=f(X0)=45,f1=f(X1)=125,f2=f(X2)=61
可见最好点XL=X0,最差点XH=X1,次差点XG=X2。
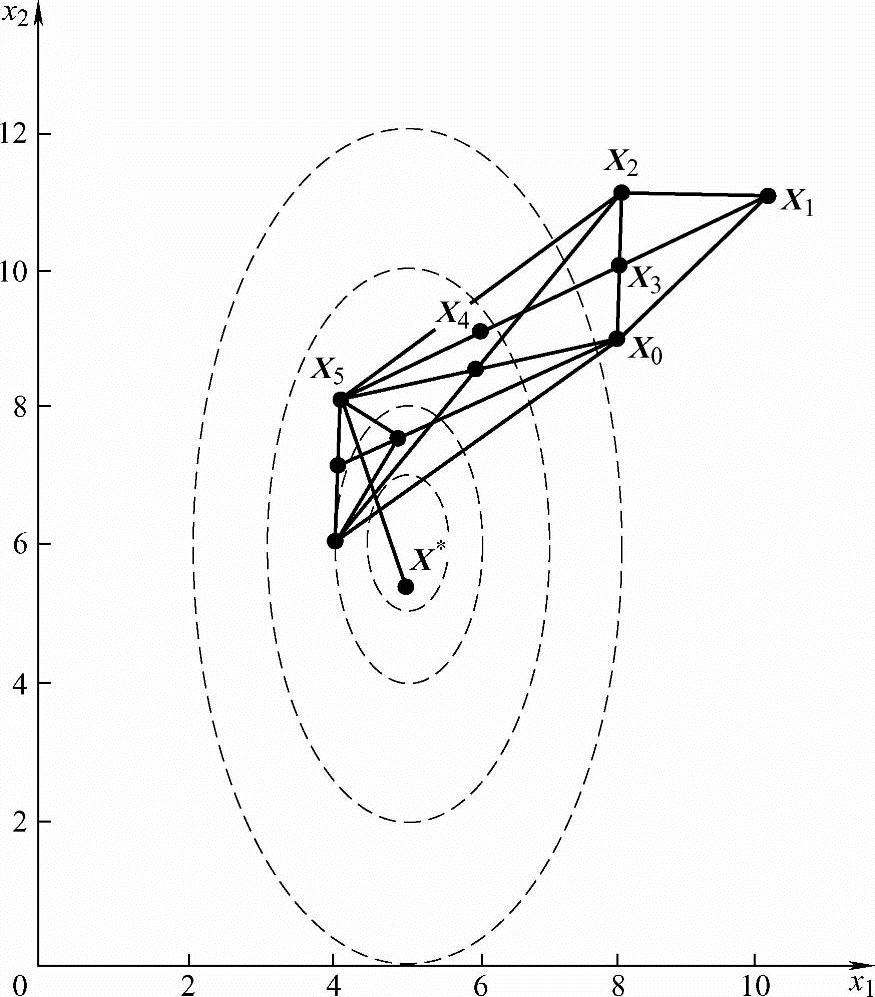
图4-21 单形替换法的迭代过程
求X0、X1、X2的重心X3:

求反射点X4及其函数值f4:
由于f4<f0,故需扩张,取α=2得扩张点X5:

由于f5<f4,故以X5代替X1,由X0X2X5构成新单纯形,迸行下一循环。经32次循环,可将目标函数值降到1×10-6,接近极小值f*=f(X*)=f(5,6)=0。
单形替换法当问题维数n较高时,需要经过很多次迭代,因此一般用于n<10的情况。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。