



范例概述:
本范例介绍的是大炮射击的模拟仿真。在该模型中,炮管与炮弹之间添加一个3D接触,使用函数工具给炮弹添加一个瞬时的矢量力,然后利用标记及追踪工具查看炮弹的飞行轨迹,并求出炮弹的速度曲线。读者可以打开视频文件D:\ug10.16\work\ch09.05\cannon.avi查看机构的运行状况,机构模型如图9.5.1所示。
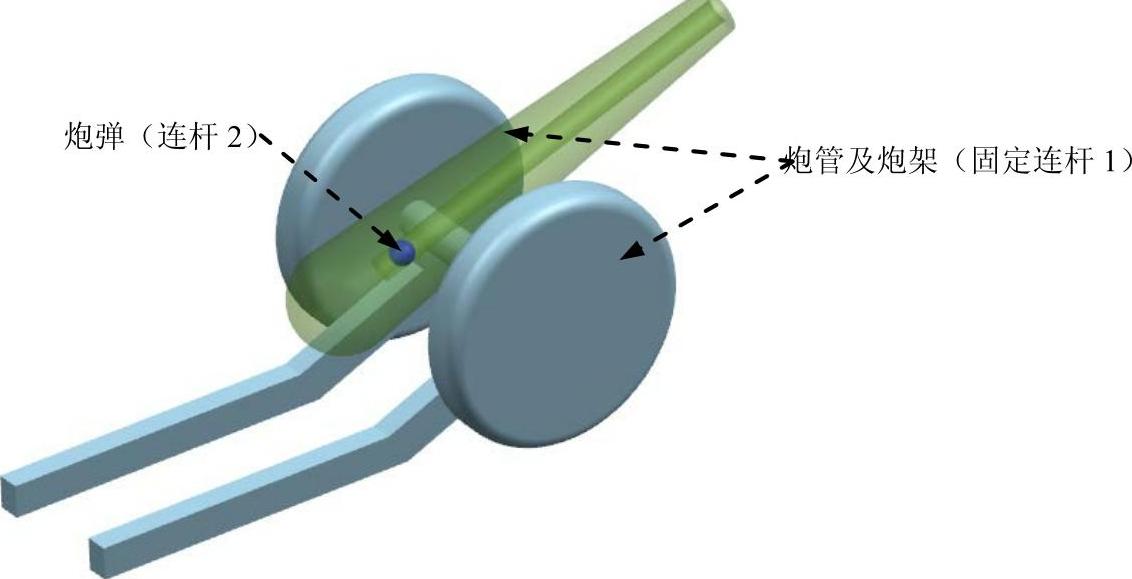
图9.5.1 机构模型
Step1.打开装配模型。打开文件D:\ug10.16\work\ch09.05\cannon_asm.prt。
Step2.进入运动仿真模块。选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建运动仿真文件。在“运动导航器”中右击cannon_asm节点,在系统弹出的快捷菜单中选择 命令,系统弹出“环境”对话框。
命令,系统弹出“环境”对话框。
Step4.设置运动环境。在“环境”对话框中的 区域选中
区域选中 单选项;取消选中
单选项;取消选中 区域中的3个复选框;选中对话框中的
区域中的3个复选框;选中对话框中的 复选框;在
复选框;在 下方的文本框中采用默认的仿真名称“motion_1”;单击
下方的文本框中采用默认的仿真名称“motion_1”;单击 按钮。
按钮。
Step5.定义固定连杆1。选择下拉菜单

 命令,系统弹出“连杆”对话框;选取图9.5.1所示的炮管及炮架为固定连杆1;在
命令,系统弹出“连杆”对话框;选取图9.5.1所示的炮管及炮架为固定连杆1;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中选中
区域中选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L001”;单击
文本框中采用默认的连杆名称“L001”;单击 按钮,完成固定连杆1的定义。
按钮,完成固定连杆1的定义。
Step6.定义连杆2。选取图9.5.1所示的炮弹为连杆2;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L002”;单击
文本框中采用默认的连杆名称“L002”;单击 按钮,完成连杆2的定义。
按钮,完成连杆2的定义。
Step7.定义3D接触。选择下拉菜单



 命令,系统弹出“3D接触”对话框;单击
命令,系统弹出“3D接触”对话框;单击 区域中的
区域中的 按钮,选取炮管实体为操作体;单击
按钮,选取炮管实体为操作体;单击 区域中的
区域中的 按钮,选取炮弹实体为基本体;在
按钮,选取炮弹实体为基本体;在 区域的
区域的 下拉列表中选择类型为
下拉列表中选择类型为 选项;单击
选项;单击 按钮,完成3D接触的定义。
按钮,完成3D接触的定义。
Step8.在模型中添加一个矢量力。
(1)选择命令。选择下拉菜单



 命令,系统弹出“矢量力”对话框。
命令,系统弹出“矢量力”对话框。
(2)定义创建类型。在 下拉列表中选择
下拉列表中选择 选项。
选项。
(3)定义操作对象。
①定义连杆。单击“矢量力”对话框 区域中的
区域中的 按钮,选取图9.5.1所示的炮弹(连杆2)为操作连杆。
按钮,选取图9.5.1所示的炮弹(连杆2)为操作连杆。
②定义原点。单击 区域中的
区域中的 按钮,在右侧下拉列表中选择“圆弧中心”
按钮,在右侧下拉列表中选择“圆弧中心” 选项,在模型中选取图9.5.2所示的曲面1为原点参考。
选项,在模型中选取图9.5.2所示的曲面1为原点参考。
③定义矢量方向。单击 区域中的
区域中的 按钮,在右侧下拉列表中选择“自动判断的矢量”选项
按钮,在右侧下拉列表中选择“自动判断的矢量”选项 ,在模型中选取图9.5.2所示的曲面2为参考。
,在模型中选取图9.5.2所示的曲面2为参考。
(4)定义基本对象。单击“矢量力”对话框 区域中的
区域中的 按钮,选取连杆1为基本连杆。
按钮,选取连杆1为基本连杆。

图9.5.2 定义矢量力
(5)定义力的大小。
①在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项;单击
选项;单击 后的
后的 按钮,选择
按钮,选择 选项,系统弹出“XY函数管理器”对话框。
选项,系统弹出“XY函数管理器”对话框。
②单击“XY函数管理器”对话框中的新建按钮 ,系统弹出“XY函数编辑器”对话框。
,系统弹出“XY函数编辑器”对话框。
③在“XY函数编辑器”对话框的 下拉列表中选择
下拉列表中选择 选项;在函数列表区域双击多项式函数
选项;在函数列表区域双击多项式函数 ,在
,在 区域的文本框中修改函数表达式为“STEP(x,0,0,0.01,500)”。
区域的文本框中修改函数表达式为“STEP(x,0,0,0.01,500)”。
(6)单击 按钮3次,完成矢量力的定义。
按钮3次,完成矢量力的定义。
Step9.创建标记。
(1)选择命令。选择下拉菜单

 命令,系统弹出“标记”对话框。
命令,系统弹出“标记”对话框。
(2)定义参考连杆。在系统 的提示下,选取连杆2为参考连杆。
的提示下,选取连杆2为参考连杆。
(3)定义参考点。在 区域中单击
区域中单击 按钮,在右侧下拉列表中选择“圆弧中心”
按钮,在右侧下拉列表中选择“圆弧中心” 选项,在模型中选取图9.5.2所示的曲面1为原点参考。(https://www.xing528.com)
选项,在模型中选取图9.5.2所示的曲面1为原点参考。(https://www.xing528.com)
(4)定义参考坐标系。在 区域中单击
区域中单击 按钮,然后在右侧单击“CSYS”对话框按钮
按钮,然后在右侧单击“CSYS”对话框按钮 ,在系统弹出的“CSYS”对话框的
,在系统弹出的“CSYS”对话框的 下拉列表中选择
下拉列表中选择 选项,单击
选项,单击 按钮,完成参考坐标系的定义,如图9.5.3所示。
按钮,完成参考坐标系的定义,如图9.5.3所示。
(5)采用系统默认的显示比例和名称,单击 按钮,完成标记的创建。
按钮,完成标记的创建。
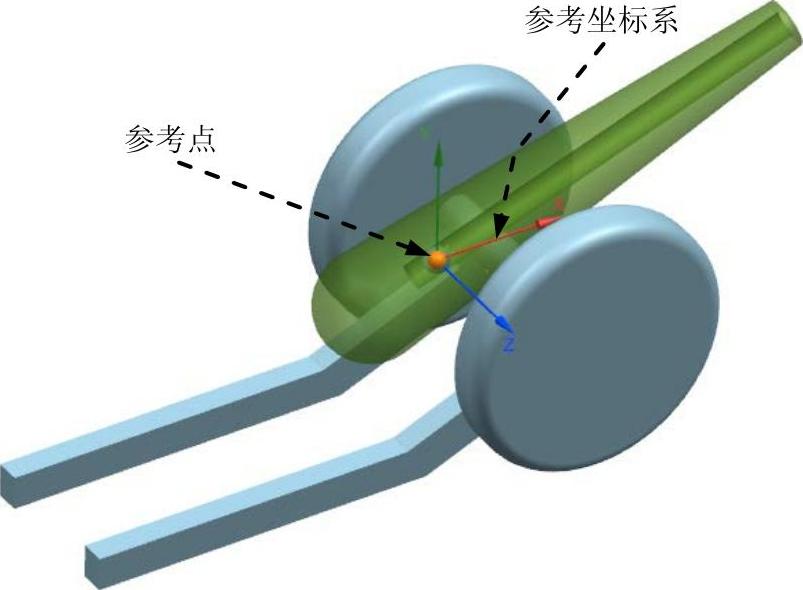
图9.5.3 定义参考点和坐标系
Step10.定义解算方案并求解。
(1)选择下拉菜单

 命令,系统弹出“解算方案”对话框;在
命令,系统弹出“解算方案”对话框;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 文本框中输入值0.5;在
文本框中输入值0.5;在 文本框中输入值200;选中对话框中的
文本框中输入值200;选中对话框中的 复选框。
复选框。
(2)设置重力方向。在“解算方案”对话框 区域的矢量下拉列表中选择
区域的矢量下拉列表中选择 选项,其他重力参数按系统默认设置值。
选项,其他重力参数按系统默认设置值。
(3)单击 按钮,完成解算方案的定义。
按钮,完成解算方案的定义。
Step11.定义动画。在“动画控制”工具条中单击“播放”按钮 ,查看机构运动;单击“导出至电影”按钮
,查看机构运动;单击“导出至电影”按钮 ,输入名称“cannon_asm”,保存动画;单击“完成动画”按钮
,输入名称“cannon_asm”,保存动画;单击“完成动画”按钮 。
。
Step12.输出炮弹的转速曲线。
(1)选择下拉菜单



 命令,单击其中的
命令,单击其中的 选项卡。
选项卡。
(2)设置输出对象。在“图表”对话框的 区域选择标记A001,在
区域选择标记A001,在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 下拉列表中选择
下拉列表中选择 选项,单击
选项,单击 区域中的
区域中的 按钮,完成“图表”对话框中的参数设置。
按钮,完成“图表”对话框中的参数设置。
(3)定义保存路径。选中“图表”对话框中的 复选框,然后单击
复选框,然后单击 按钮,选择D:\ug10.16\work\ch09.05\cannon_asm\cannon_asm.afu为保存路径。
按钮,选择D:\ug10.16\work\ch09.05\cannon_asm\cannon_asm.afu为保存路径。
(4)单击 按钮,系统进入函数显示环境并显示旋转副J002的速度-时间曲线,如图9.5.4所示。
按钮,系统进入函数显示环境并显示旋转副J002的速度-时间曲线,如图9.5.4所示。

图9.5.4 速度-时间曲线
Step13.在“布局管理器”工具条中单击“返回到模型”按钮 ,返回到运动仿真环境。
,返回到运动仿真环境。
Step14.追踪炮弹轨迹。
(1)选择命令。选择下拉菜单



 命令,系统弹出“追踪”对话框。
命令,系统弹出“追踪”对话框。
(2)定义追踪对象,在“运动导航器”中选取标记“A001”为追踪对象;其他参数采用系统默认设置,单击 按钮,完成追踪对象的定义。
按钮,完成追踪对象的定义。
Step15.选择下拉菜单



 命令,对解算方案再次进行求解。
命令,对解算方案再次进行求解。
Step16.分析追踪结果。
(1)选择命令。选择下拉菜单



 命令,系统弹出“动画”对话框。
命令,系统弹出“动画”对话框。
(2)激活测量检查和暂停。在该对话框中选中 复选框,然后单击“播放”
复选框,然后单击“播放” 按钮,此时机构开始运行并显示追踪结果,如图9.5.5所示。
按钮,此时机构开始运行并显示追踪结果,如图9.5.5所示。
(3)单击 按钮,完成追踪操作。
按钮,完成追踪操作。

图9.5.5 追踪结果
Step17.选择下拉菜单

 命令,保存模型。
命令,保存模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。