



AFU表格驱动是使用一个AFU格式的表格来驱动机构运动的变化,表格可以通过输入数据、绘制图形、随机变化、波形扫掠和自定义函数等方式创建。
1.随机数字
使用“随机数字”工具可以在指定的时间范围内自动生成一定数量的无规律数据来创建AFU表格,常用来模拟机构中连杆的振动。
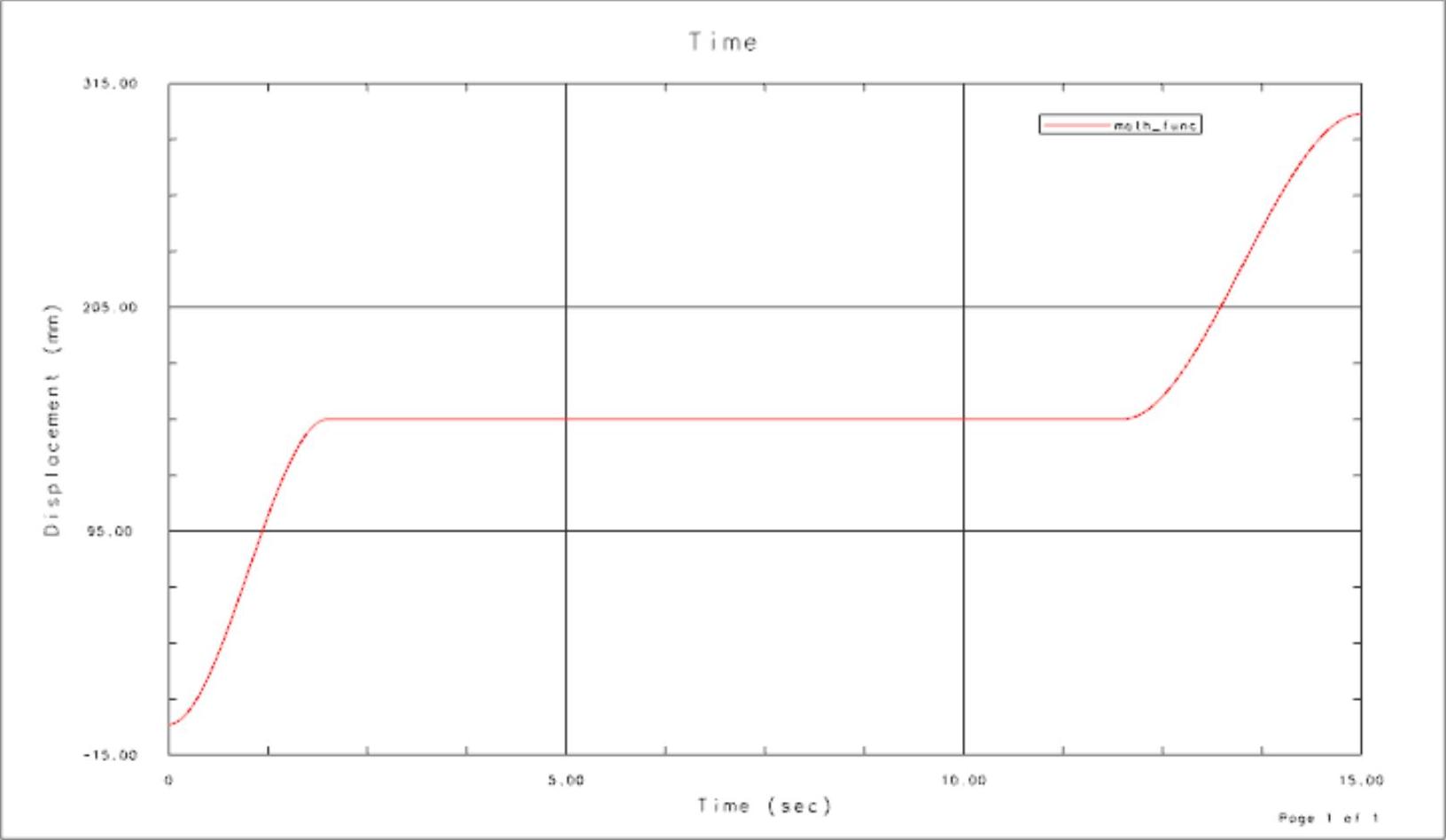
图7.3.22 位移函数图形
下面举例说明随机数字驱动的应用。在图7.3.23所示的机构中,电动筛在基座上进行振动,此时可以使用随机数字工具创建一个AFU表格驱动机构中的滑动副进行运动,以达到振动仿真的目的。
Step1.打开装配模型。打开文件D:\ug10.16\work\ch07.03.04.01\random_asm.prt。
Step2.进入运动仿真模块。选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建运动仿真文件。在“运动导航器”中右击random_asm节点,在系统弹出的快捷菜单中选择 命令,系统弹出“环境”对话框。
命令,系统弹出“环境”对话框。
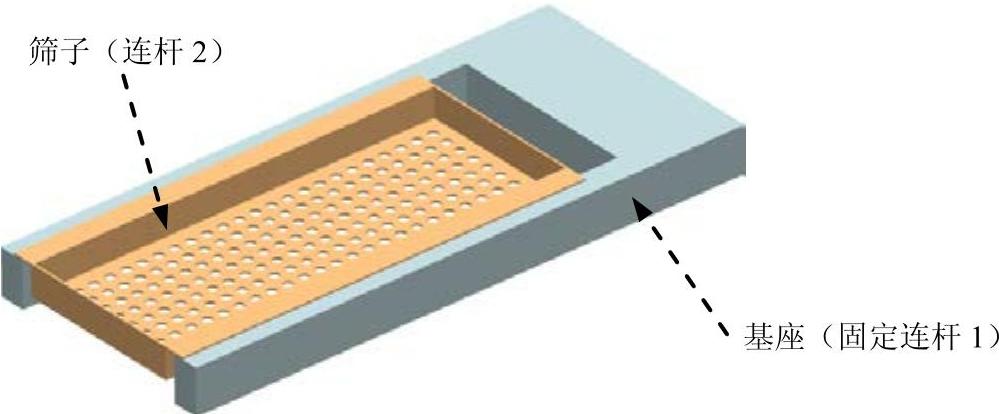
图7.3.23 机构模型
Step4.设置运动环境。在“环境”对话框中的 区域选中
区域选中 单选项;取消选中
单选项;取消选中 区域中的3个复选框;选中对话框中的
区域中的3个复选框;选中对话框中的 复选框;在
复选框;在 下方的文本框中采用默认的仿真名称“motion_1”;单击
下方的文本框中采用默认的仿真名称“motion_1”;单击 按钮。
按钮。
Step5.定义固定连杆1。选择下拉菜单

 命令,系统弹出“连杆”对话框;选取图7.3.23所示的基座为固定连杆1;在
命令,系统弹出“连杆”对话框;选取图7.3.23所示的基座为固定连杆1;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中选中
区域中选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L001”;单击
文本框中采用默认的连杆名称“L001”;单击 按钮,完成固定连杆1的定义。
按钮,完成固定连杆1的定义。
Step6.定义连杆2。选取图7.3.23所示的筛子为连杆2;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L002”;单击
文本框中采用默认的连杆名称“L002”;单击 按钮,完成连杆2的定义。
按钮,完成连杆2的定义。
Step7.定义连杆2中的滑动副。
(1)定义滑动副。选择下拉菜单

 命令,系统弹出“运动副”对话框;在“运动副”对话框
命令,系统弹出“运动副”对话框;在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择 选项;在模型中选取图7.3.24所示的边线为参考,系统自动选择连杆、原点和矢量方向。
选项;在模型中选取图7.3.24所示的边线为参考,系统自动选择连杆、原点和矢量方向。
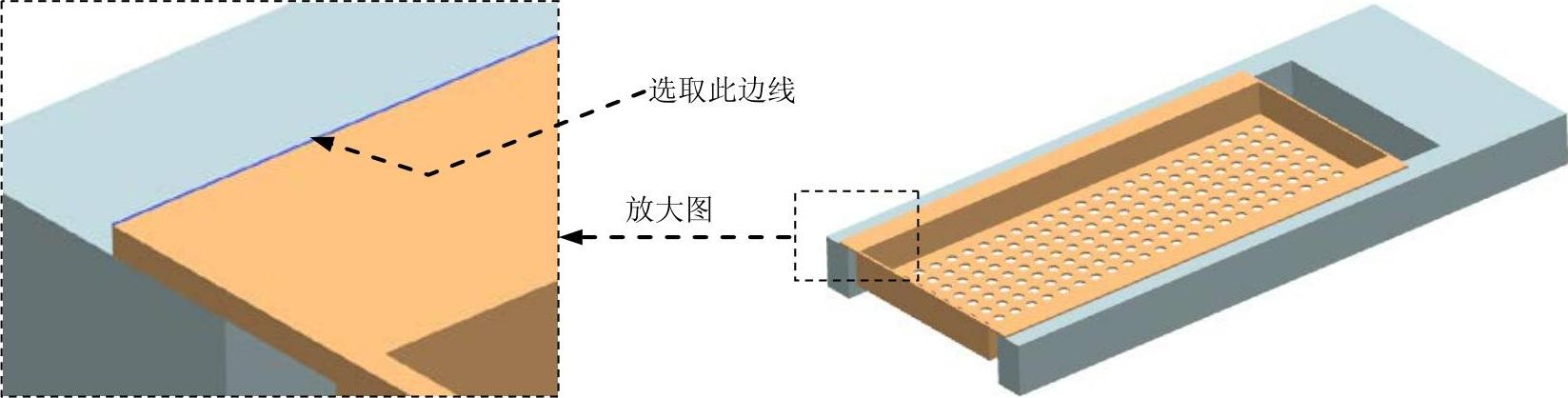
图7.3.24 定义滑动副
(2)定义函数驱动。
①单击“运动副”对话框中的 选项卡;在
选项卡;在 下拉列表中选择
下拉列表中选择 选项。
选项。
②在 下拉列表中选择
下拉列表中选择 选项;单击
选项;单击 后的
后的 按钮,选择
按钮,选择 选项,系统弹出“XY函数管理器”对话框。
选项,系统弹出“XY函数管理器”对话框。
③在“XY函数管理器”对话框的 区域中选中
区域中选中 单选项,如图7.3.25所示,单击“新建”按钮
单选项,如图7.3.25所示,单击“新建”按钮 ,系统弹出图7.3.26所示的“XY函数编辑器”对话框。
,系统弹出图7.3.26所示的“XY函数编辑器”对话框。
说明:由于系统会自动记录以前在软件中创建的AFU函数,所以下次再创建函数时,“XY函数编辑器”对话框可能会有历史记录,如果要删除历史记录,找到对应目录下的AFU文件将其移动或删除即可。
说明:图7.3.26显示的是“XY函数编辑器”对话框的 界面,在该界面中可以编辑函数的名称,AFU文件的保存路径、用途、类型以及ID信息等参数。
界面,在该界面中可以编辑函数的名称,AFU文件的保存路径、用途、类型以及ID信息等参数。
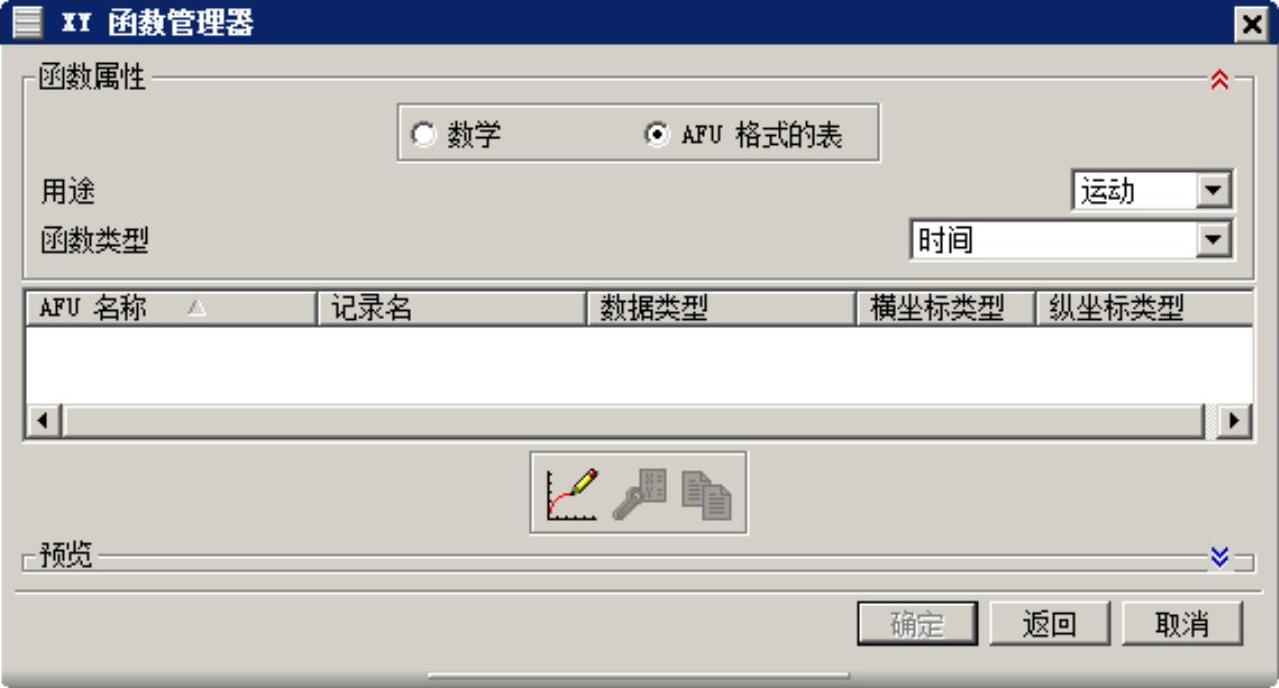
图7.3.25 “XY函数管理器”对话框
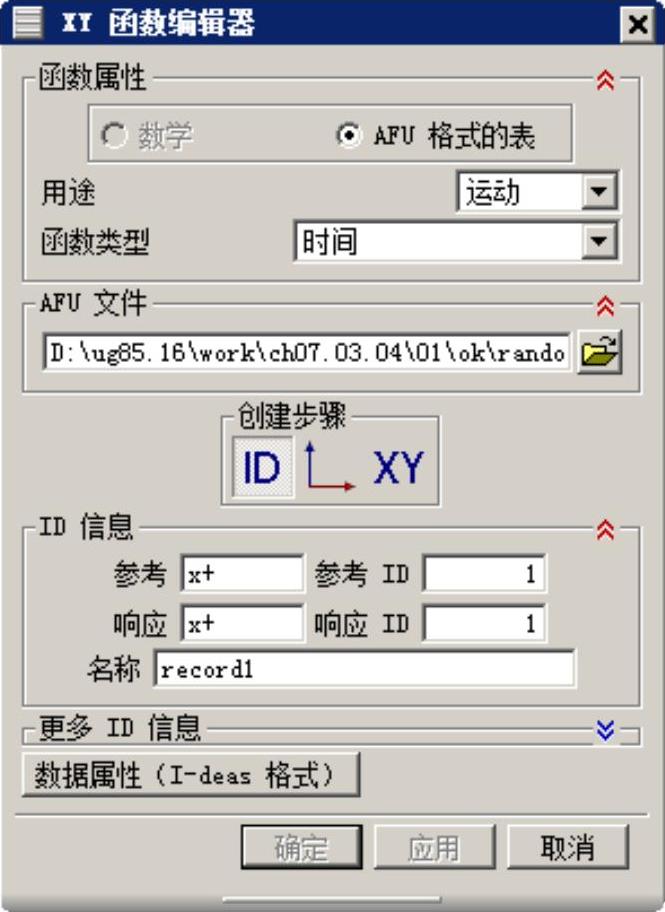
图7.3.26 “XY函数编辑器”对话框
④在“XY函数编辑器”对话框中单击“XY轴定义”按钮 ,在
,在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,如图7.3.27所示。
选项,如图7.3.27所示。
说明:
●图7.3.27所示的是“XY函数编辑器”对话框的“XY轴定义”界面,在该界面中可以编辑函数的横坐标和纵坐标的间距、格式、单位名以及标签等参数。
● 区域
区域 下拉列表中的3个选项说明如下。
下拉列表中的3个选项说明如下。

 选项:以恒定增量增加横坐标,使用该选项,可以采用文本输入、表格输入、随机数字、波形扫掠以及函数的方法来创建表格数据。
选项:以恒定增量增加横坐标,使用该选项,可以采用文本输入、表格输入、随机数字、波形扫掠以及函数的方法来创建表格数据。

 选项:指定将每个横坐标值都视为唯一的。使用该选项,可以采用文本输入、表格输入、栅格数字化、数据数字化以及绘图数字化的方法来创建表格数据。
选项:指定将每个横坐标值都视为唯一的。使用该选项,可以采用文本输入、表格输入、栅格数字化、数据数字化以及绘图数字化的方法来创建表格数据。

 选项:按顺序显示X轴数据并按顺序标记X轴的值,而不论实际X值如何。软件以递增方式将每个值放置在图表的X轴上,而不用X值替代X轴的位置。
选项:按顺序显示X轴数据并按顺序标记X轴的值,而不论实际X值如何。软件以递增方式将每个值放置在图表的X轴上,而不用X值替代X轴的位置。
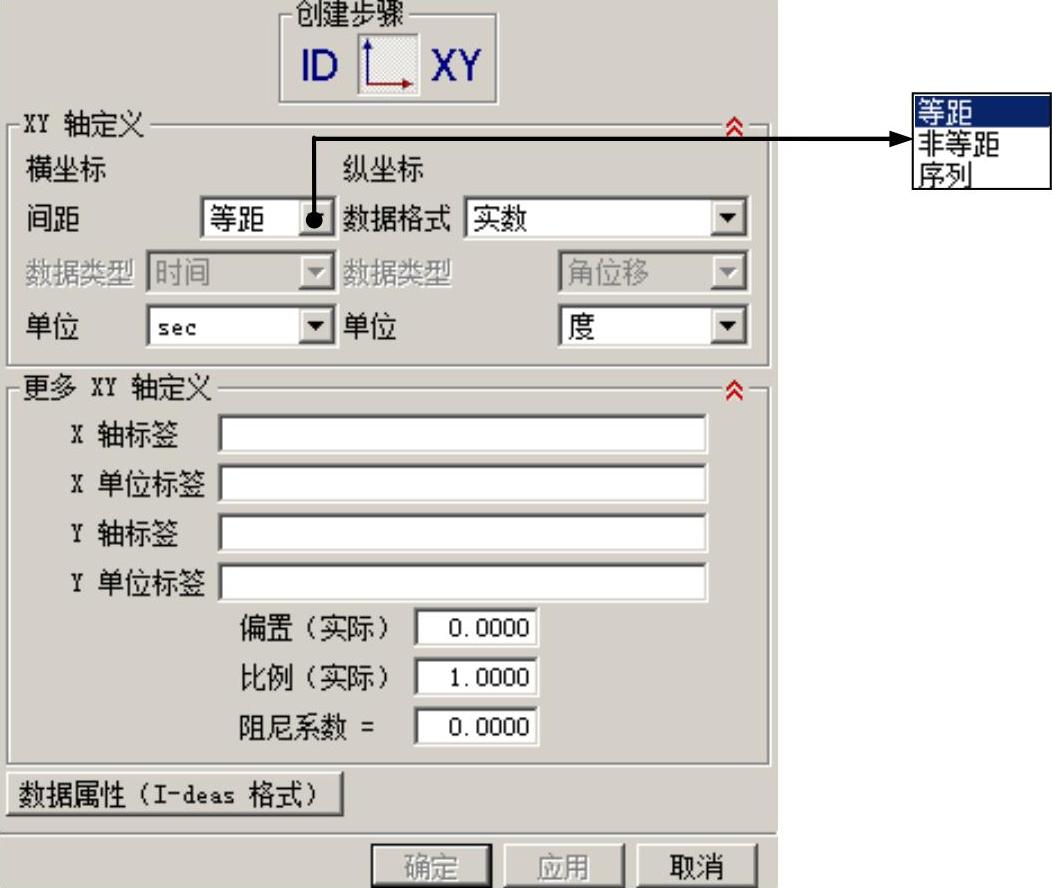
图7.3.27 “XY轴定义”界面
⑤在“XY函数编辑器”对话框中单击“XY数据”按钮 ,在
,在 区域
区域 下方的文本框中输入值0,在
下方的文本框中输入值0,在 文本框中输入值0.02,在
文本框中输入值0.02,在 文本框中输入值500,如图7.3.28所示。
文本框中输入值500,如图7.3.28所示。
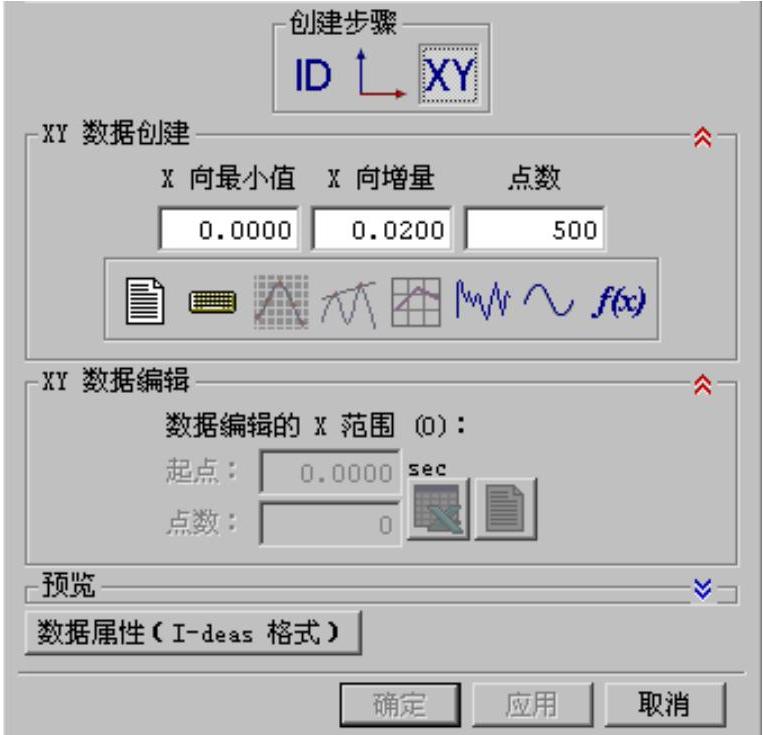
图7.3.28 “XY数据”界面
说明:
●图7.3.28显示的是“XY函数编辑器”对话框的“XY数据”界面,在该界面中可以选择各种数据创建的方法来创建AFU表格。
● 区域的部分选项说明如下。
区域的部分选项说明如下。

 :定义横坐标的最小值,只有当X轴的
:定义横坐标的最小值,只有当X轴的 类型是
类型是 时可用。
时可用。

 :对于
:对于 类型的数据,定义横坐标的增量。
类型的数据,定义横坐标的增量。

 :定义在图表上绘出的点数。
:定义在图表上绘出的点数。
● 按钮:从文本编辑器输入。可以通过将XY数据点输入到文本文件来生成XY点的数据。
按钮:从文本编辑器输入。可以通过将XY数据点输入到文本文件来生成XY点的数据。
● 按钮:从电子表格输入。可以通过将数据输入到Excel电子表格中的两列来生成XY点的数据,输入完成后,需要在Excel中选择下拉菜单
按钮:从电子表格输入。可以通过将数据输入到Excel电子表格中的两列来生成XY点的数据,输入完成后,需要在Excel中选择下拉菜单

 命令更新表函数,然后再退出电子表格。
命令更新表函数,然后再退出电子表格。
● 按钮:从栅格数字化。仅当横坐标间距设置为
按钮:从栅格数字化。仅当横坐标间距设置为 或
或 时可用,可以通过选择栅格上的XY点来生成数据。
时可用,可以通过选择栅格上的XY点来生成数据。
● 按钮:从数据数字化。仅当横坐标间距设置为
按钮:从数据数字化。仅当横坐标间距设置为 或
或 时可用,可以通过选择一个现有的表函数,然后在绘出的曲线上选择数据点来生成XY点数据。
时可用,可以通过选择一个现有的表函数,然后在绘出的曲线上选择数据点来生成XY点数据。
● 按钮:从绘图数字化。仅当横坐标间距设置为
按钮:从绘图数字化。仅当横坐标间距设置为 或
或 时可用,可以通过在另一个绘图函数的绘制曲线上选择XY点来生成数据。前提是必须对一个现有函数绘图,然后可以选择此选项并在绘图上选择想要的数据点。
时可用,可以通过在另一个绘图函数的绘制曲线上选择XY点来生成数据。前提是必须对一个现有函数绘图,然后可以选择此选项并在绘图上选择想要的数据点。
● 按钮:随机。仅当横坐标间距设置为
按钮:随机。仅当横坐标间距设置为 时可用,随机生成XY点的数据。
时可用,随机生成XY点的数据。
● 按钮:波形扫掠。仅当横坐标间距设置为
按钮:波形扫掠。仅当横坐标间距设置为 时可用,通过执行波形扫掠生成XY点的数据,共有4种扫掠类型:正弦、余弦、正方形和已过滤正方形。
时可用,通过执行波形扫掠生成XY点的数据,共有4种扫掠类型:正弦、余弦、正方形和已过滤正方形。
● 按钮:方程。仅当横坐标间距设置为
按钮:方程。仅当横坐标间距设置为 时可用,使用数学表达式生成XY点的数据。
时可用,使用数学表达式生成XY点的数据。
⑥在“XY函数编辑器”对话框的 区域中单击“随机”按钮
区域中单击“随机”按钮 。
。
说明:
●此时将激活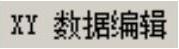 区域中的选项,在该区域中可以设置要编辑的起点以及点数,通过Excel电子表格或文本编辑器来编辑随机的数据,如图7.3.29所示。
区域中的选项,在该区域中可以设置要编辑的起点以及点数,通过Excel电子表格或文本编辑器来编辑随机的数据,如图7.3.29所示。
●对于同一个函数,每次单击“随机”按钮生成的数据均不同。
●在“XY函数编辑器”对话框中单击 区域中的“预览”按钮
区域中的“预览”按钮 ,即可预览函数的图形,如图7.3.30所示。
,即可预览函数的图形,如图7.3.30所示。
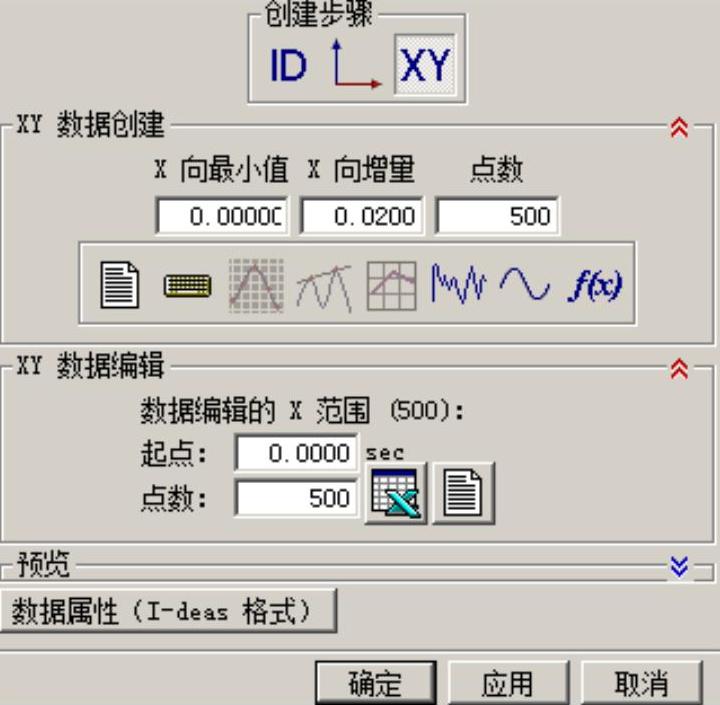
图7.3.29 “XY数据编辑”界面
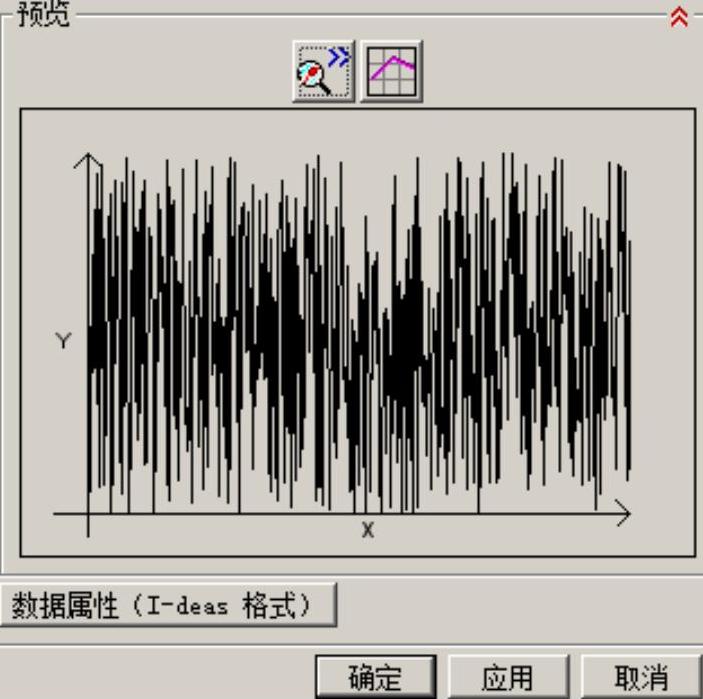
图7.3.30 预览函数图形
●在“XY函数编辑器”对话框中单击“绘图”按钮 ,可以在图形区中显示具体的函数图形,如图7.3.31所示;在“布局管理器”工具条中单击“返回到模型”按钮
,可以在图形区中显示具体的函数图形,如图7.3.31所示;在“布局管理器”工具条中单击“返回到模型”按钮 ,可以返回到运动仿真环境。
,可以返回到运动仿真环境。
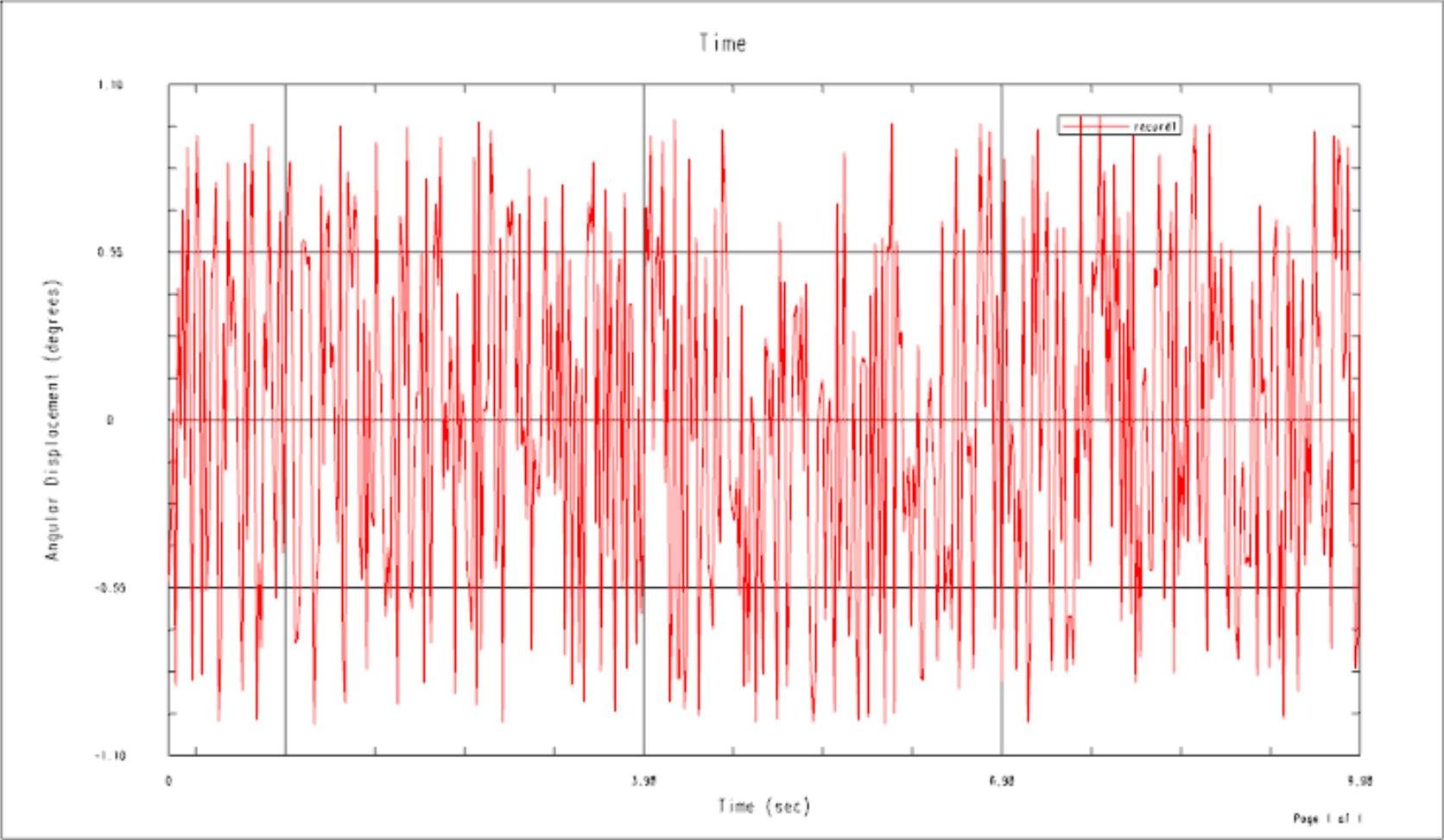
图7.3.31 函数图形
(3)单击 按钮3次,完成运动副及驱动的定义。
按钮3次,完成运动副及驱动的定义。
Step8.定义解算方案并求解。选择下拉菜单

 命令,系统弹出“解算方案”对话框;在
命令,系统弹出“解算方案”对话框;在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 文本框中输入值10;在
文本框中输入值10;在 文本框中输入值400;选中对话框中的
文本框中输入值400;选中对话框中的 复选框;单击
复选框;单击 按钮,完成解算方案的定义。
按钮,完成解算方案的定义。
Step9.定义动画。在“动画控制”工具条中单击“播放”按钮 ,查看机构运动;单击“导出至电影”按钮
,查看机构运动;单击“导出至电影”按钮 ,输入名称“random_asm”,保存动画;单击“完成动画”按钮
,输入名称“random_asm”,保存动画;单击“完成动画”按钮 。
。
Step10.选择下拉菜单

 命令,保存模型。
命令,保存模型。
2.使用文本
“使用文本”工具可以在文本文件中输入XY的值来定义AFU表格中的数据。
下面举例说明使用文本驱动的应用。在图7.3.32所示的机构中,模拟旋钮在安装底座上旋转运动。
Step1.打开装配模型。打开文件D:\ug10.16\work\ch07.03.04.02\text_asm.prt。
Step2.进入运动仿真模块。选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建运动仿真文件。在“运动导航器”中右击text_asm节点,在系统弹出的快捷菜单中选择 命令,系统弹出“环境”对话框。
命令,系统弹出“环境”对话框。
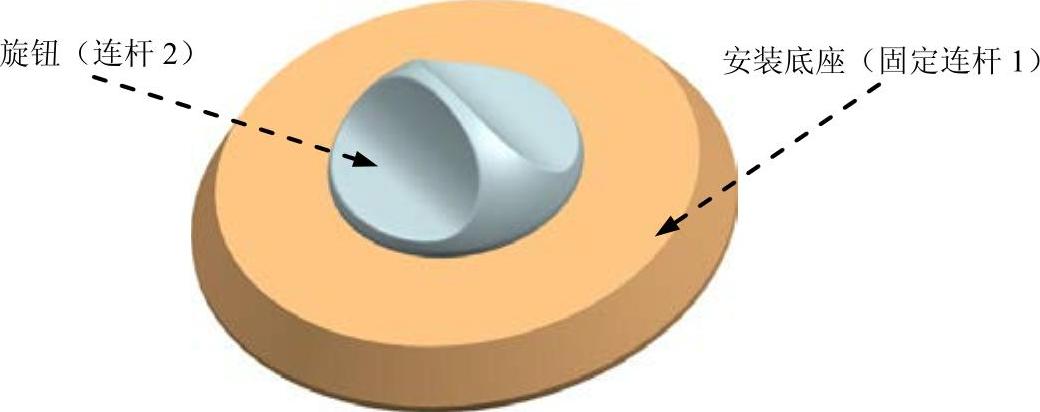
图7.3.32 机构模型
Step4.设置运动环境。在“环境”对话框中的 区域选中
区域选中 单选项;取消选中
单选项;取消选中 区域中的3个复选框;选中对话框中的
区域中的3个复选框;选中对话框中的 复选框;在
复选框;在 下方的文本框中采用默认的仿真名称“motion_1”;单击
下方的文本框中采用默认的仿真名称“motion_1”;单击 按钮。
按钮。
Step5.定义固定连杆1。选择下拉菜单

 命令,系统弹出“连杆”对话框;选取图7.3.32所示的安装底座为固定连杆1;在
命令,系统弹出“连杆”对话框;选取图7.3.32所示的安装底座为固定连杆1;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中选中
区域中选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L001”;单击
文本框中采用默认的连杆名称“L001”;单击 按钮,完成固定连杆1的定义。
按钮,完成固定连杆1的定义。
Step6.定义连杆2。选取图7.3.32所示的旋钮为连杆2;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L002”;单击
文本框中采用默认的连杆名称“L002”;单击 按钮,完成连杆2的定义。
按钮,完成连杆2的定义。
Step7.定义连杆2中的旋转副。
(1)定义旋转副。选择下拉菜单

 命令,系统弹出“运动副”对话框;在“运动副”对话框
命令,系统弹出“运动副”对话框;在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择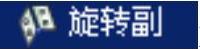 选项;在模型中选取图7.3.33所示的边线为参考,系统自动选择连杆、原点及矢量方向。
选项;在模型中选取图7.3.33所示的边线为参考,系统自动选择连杆、原点及矢量方向。
图7.3.33 定义旋转副
(2)定义函数驱动。
①单击“运动副”对话框中的 选项卡;在
选项卡;在 下拉列表中选择
下拉列表中选择 选项。
选项。
②在 下拉列表中选择
下拉列表中选择 选项;单击
选项;单击 后的
后的 按钮,选择
按钮,选择 选项,系统弹出“XY函数管理器”对话框。(https://www.xing528.com)
选项,系统弹出“XY函数管理器”对话框。(https://www.xing528.com)
③在“XY函数管理器”对话框的 区域中选中
区域中选中 单选项,单击新建按钮
单选项,单击新建按钮 ,系统弹出“XY函数编辑器”对话框。
,系统弹出“XY函数编辑器”对话框。
④单击“XY轴定义”按钮 ,在
,在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项。
选项。
⑤单击“XY数据”按钮 ,在
,在 区域
区域 下方的文本框中输入值1,在
下方的文本框中输入值1,在 文本框中输入值1,在
文本框中输入值1,在 文本框中输入值10。
文本框中输入值10。
⑥单击 区域中的“从文本编辑器输入”按钮
区域中的“从文本编辑器输入”按钮 ,在“键入”对话框中输入图7.3.34所示的参数。
,在“键入”对话框中输入图7.3.34所示的参数。
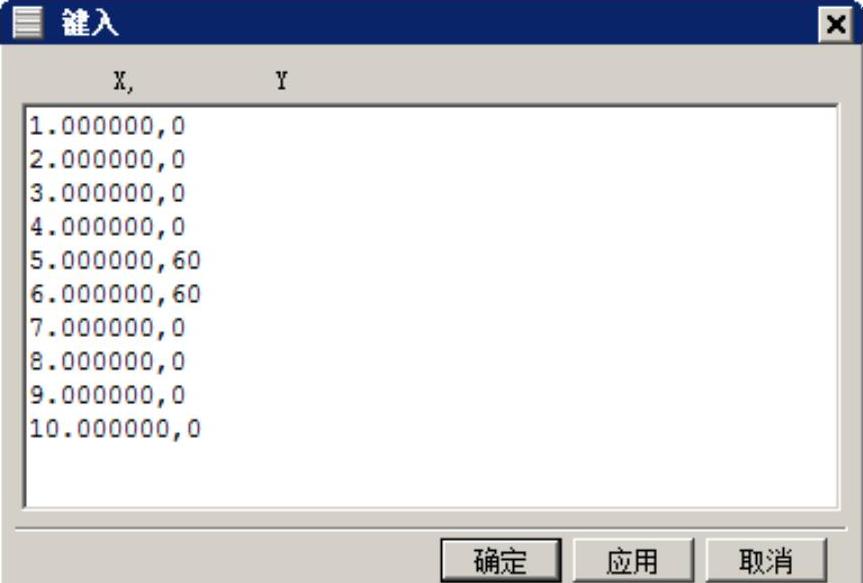
图7.3.34 “键入”对话框
(3)单击 按钮4次,完成运动副及驱动的定义。
按钮4次,完成运动副及驱动的定义。
Step8.定义解算方案并求解。选择下拉菜单

 命令,系统弹出“解算方案”对话框;在
命令,系统弹出“解算方案”对话框;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 文本框中输入值10;在
文本框中输入值10;在 文本框中输入值1000;选中对话框中的
文本框中输入值1000;选中对话框中的 复选框;单击
复选框;单击 按钮,完成解算方案的定义。
按钮,完成解算方案的定义。
Step9.定义动画。在“动画控制”工具条中单击“播放”按钮 ,查看机构运动;单击“导出至电影”按钮
,查看机构运动;单击“导出至电影”按钮 ,输入名称“text_asm”,保存动画;单击“完成动画”按钮
,输入名称“text_asm”,保存动画;单击“完成动画”按钮 。
。
Step10.选择下拉菜单

 命令,保存模型。
命令,保存模型。
说明:使用下拉菜单


 命令,得到文本驱动的函数图形如图7.3.35所示。
命令,得到文本驱动的函数图形如图7.3.35所示。
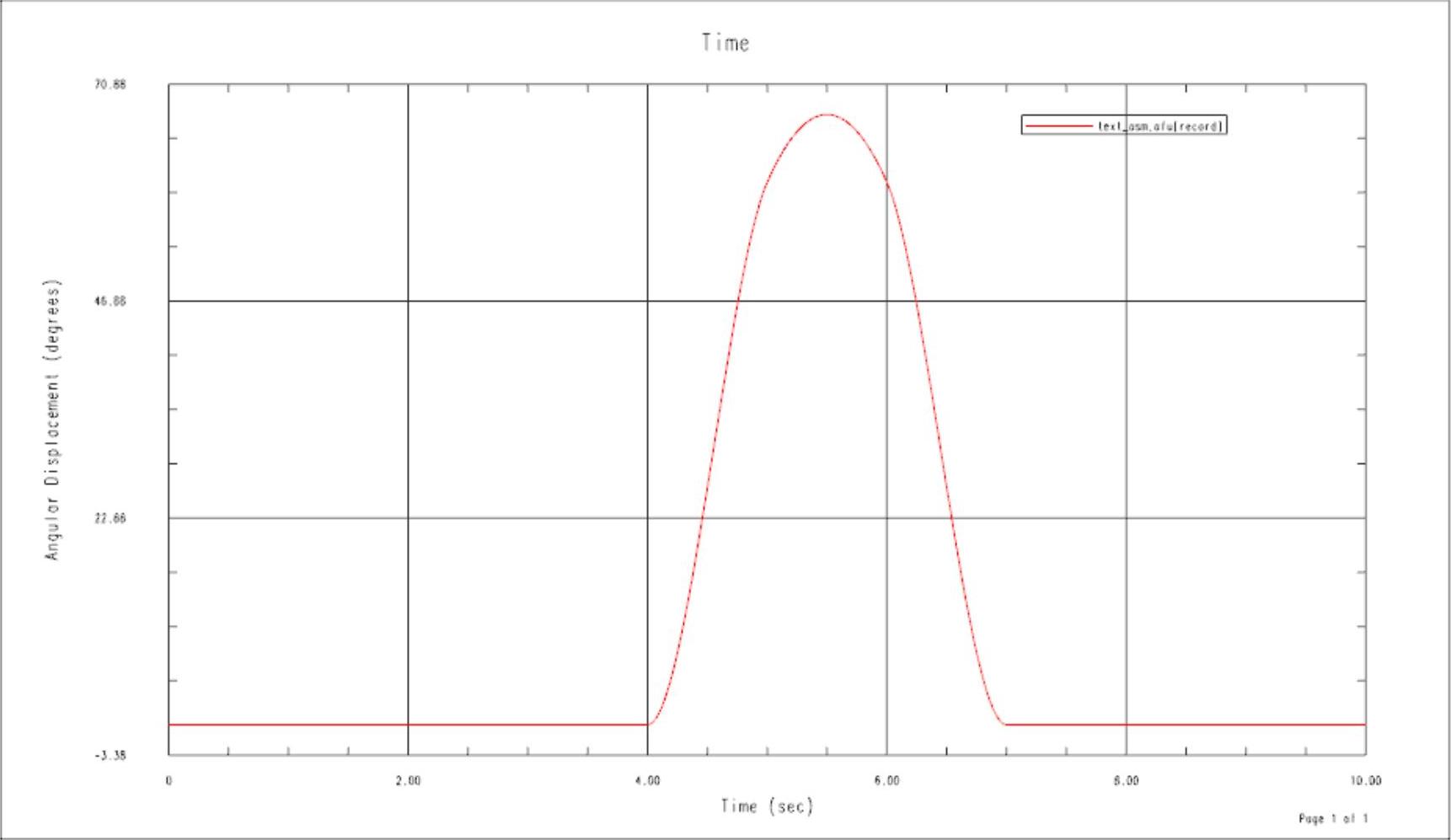
图7.3.35 驱动函数图形
3.使用栅格化数字
使用“栅格数字化”工具可以在XY坐标系的栅格中单击任意位置取点,来绘制大致的函数图形,所取的点还可以进行编辑修改。
下面举例说明使用栅格数字化驱动的应用。在图7.3.36所示的机构中,模拟球形滚子在导槽内的滑动。
Step1.打开装配模型。打开文件D:\ug10.16\work\ch07.03.04.03\lattice_asm.prt。
Step2.进入运动仿真模块。选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建运动仿真文件。在“运动导航器”中右击“lattice_asm”节点,在系统弹出的快捷菜单中选择 命令,系统弹出“环境”对话框。
命令,系统弹出“环境”对话框。
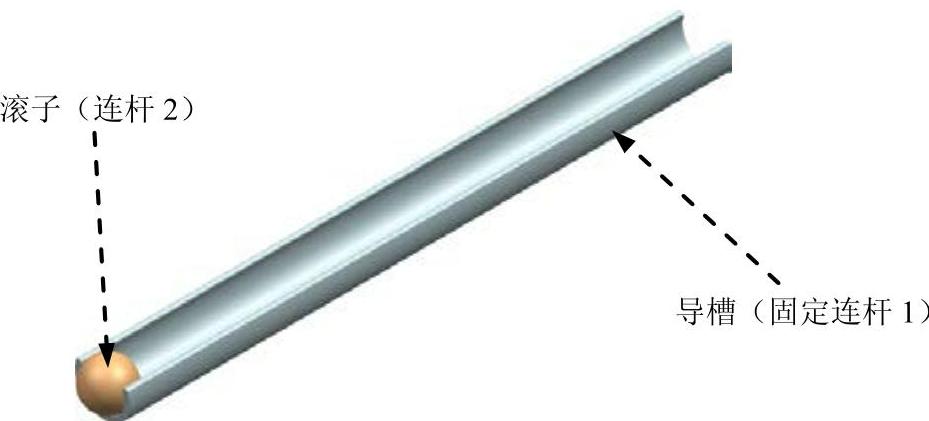
图7.3.36 机构模型
Step4.设置运动环境。在“环境”对话框中的 区域选中
区域选中 单选项;取消选中
单选项;取消选中 区域中的3个复选框;选中对话框中的
区域中的3个复选框;选中对话框中的 复选框;在
复选框;在 下方的文本框中采用默认的仿真名称“motion_1”;单击
下方的文本框中采用默认的仿真名称“motion_1”;单击 按钮。
按钮。
Step5.定义固定连杆1。选择下拉菜单

 命令,系统弹出“连杆”对话框;选取图7.3.36所示的导槽为固定连杆1;在
命令,系统弹出“连杆”对话框;选取图7.3.36所示的导槽为固定连杆1;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中选中
区域中选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L001”;单击
文本框中采用默认的连杆名称“L001”;单击 按钮,完成固定连杆1的定义。
按钮,完成固定连杆1的定义。
Step6.定义连杆2。选取图7.3.36所示的球形滚子为连杆2;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L002”;单击
文本框中采用默认的连杆名称“L002”;单击 按钮,完成连杆2的定义。
按钮,完成连杆2的定义。
Step7.定义连杆2中的滑动副。
(1)定义滑动副。选择下拉菜单

 命令,系统弹出“运动副”对话框;在“运动副”对话框
命令,系统弹出“运动副”对话框;在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择 选项;选取图7.3.37所示的连杆2为参考连杆;在“运动副”对话框
选项;选取图7.3.37所示的连杆2为参考连杆;在“运动副”对话框 区域的
区域的 下拉列表中选择“圆弧中心”
下拉列表中选择“圆弧中心” 选项,在模型中选取图7.3.37所示的球面为原点参考;在
选项,在模型中选取图7.3.37所示的球面为原点参考;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,在矢量下拉列表中选择
选项,在矢量下拉列表中选择 选项。
选项。
(2)定义函数驱动。
①单击“运动副”对话框中的 选项卡;在
选项卡;在 下拉列表中选择
下拉列表中选择 选项。
选项。
②在 下拉列表中选择
下拉列表中选择 选项;单击
选项;单击 后的
后的 按钮,选择
按钮,选择 选项,系统弹出“XY函数管理器”对话框。
选项,系统弹出“XY函数管理器”对话框。
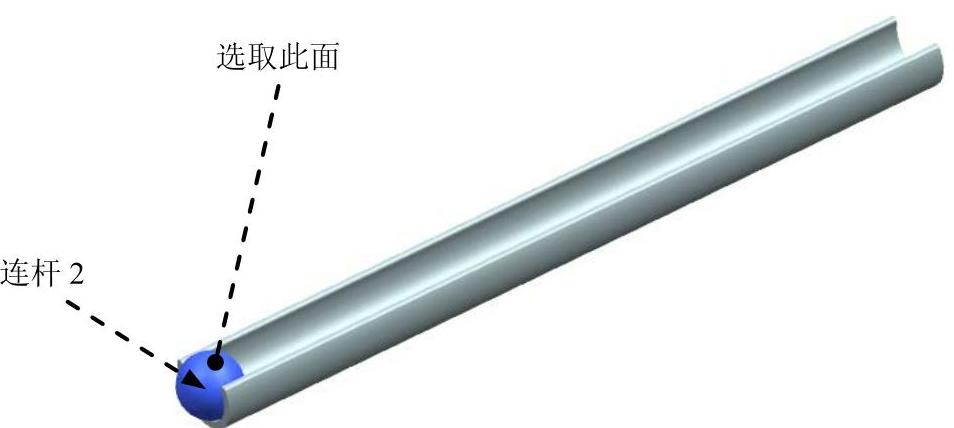
图7.3.37 定义连杆2中的滑动副
③在“XY函数管理器”对话框的 区域中选中
区域中选中 单选项,单击新建按钮
单选项,单击新建按钮 ,系统弹出“XY函数编辑器”对话框。
,系统弹出“XY函数编辑器”对话框。
④单击“XY轴定义”按钮 ,在
,在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项。
选项。
⑤单击“XY数据”按钮 ,然后单击
,然后单击 区域中的“从栅格数字化”按钮
区域中的“从栅格数字化”按钮 ,在系统弹出的“数据点设置”对话框中设置图7.3.38所示的参数。
,在系统弹出的“数据点设置”对话框中设置图7.3.38所示的参数。
说明:图7.3.38所示的“数据点设置”对话框用于设置所绘制的函数图形的起始点和终止点。
⑥单击“数据点设置”对话框中的 按钮,系统弹出图7.3.39所示的“拾取值”对话框,并进入函数图形的栅格显示界面。
按钮,系统弹出图7.3.39所示的“拾取值”对话框,并进入函数图形的栅格显示界面。
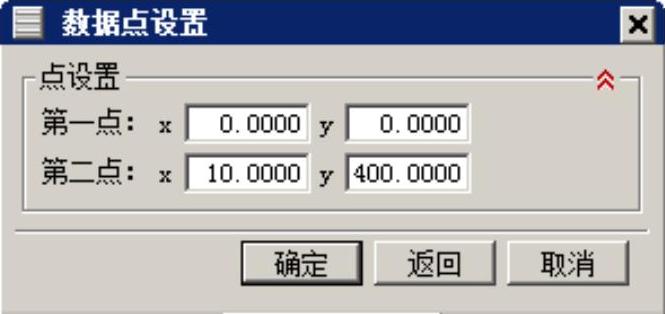
图7.3.38 “数据点设置”对话框
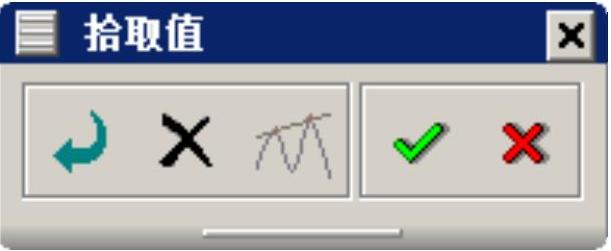
图7.3.39 “拾取值”对话框
⑦在栅格显示界面中依次单击图7.3.40所示的位置1~位置4(大致位置即可),在栅格中取4个点绘制函数图形。
⑧单击“拾取值”对话框中的“完成”按钮 ,完成函数图形的创建,如图7.3.41所示。
,完成函数图形的创建,如图7.3.41所示。
(3)单击 按钮3次,完成运动副及驱动的定义。
按钮3次,完成运动副及驱动的定义。
(4)在“布局管理器”工具条中单击“返回到模型”按钮 ,返回到运动仿真环境。
,返回到运动仿真环境。
Step8.定义解算方案并求解。
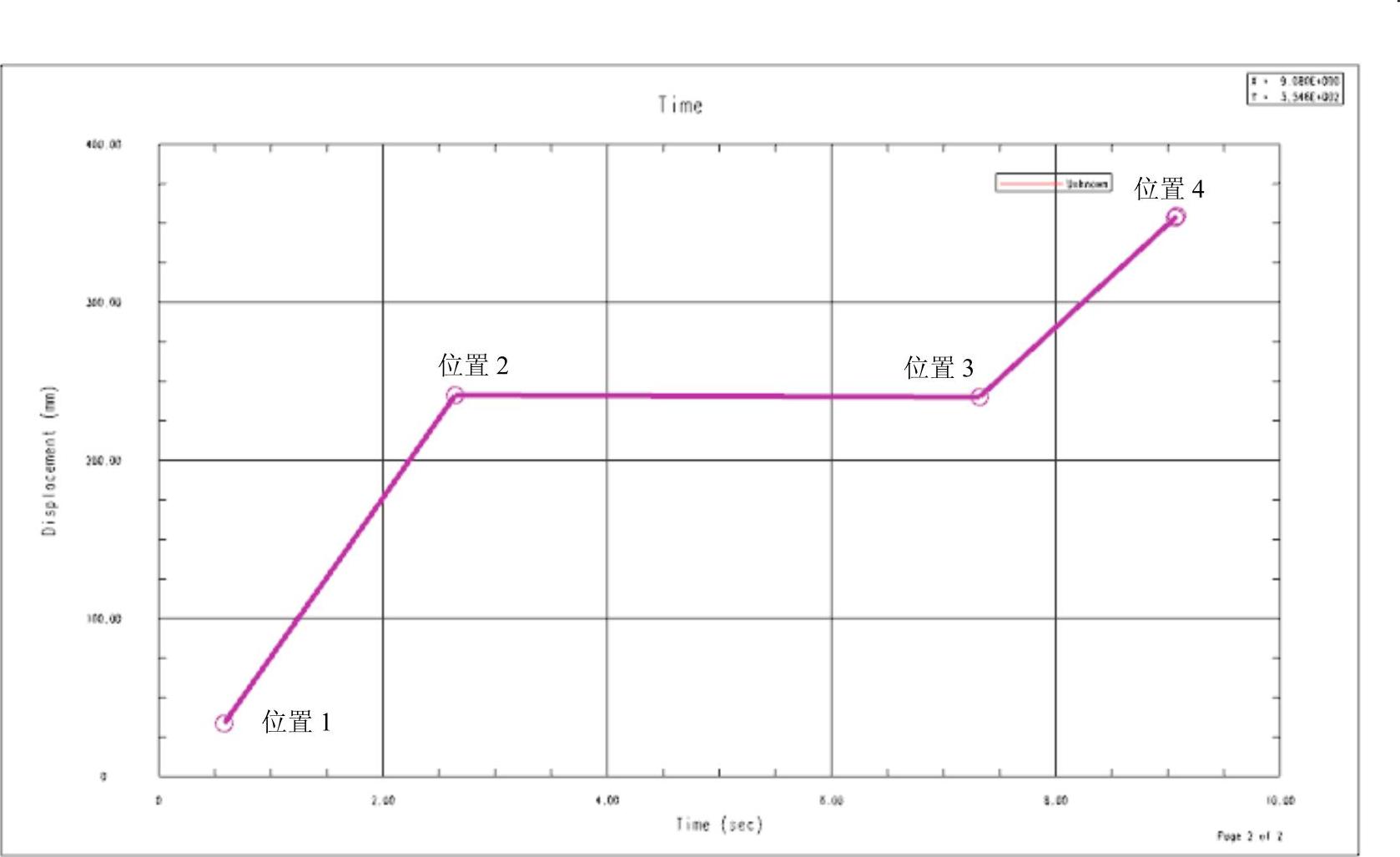
图7.3.40 定义连杆2中的滑动副
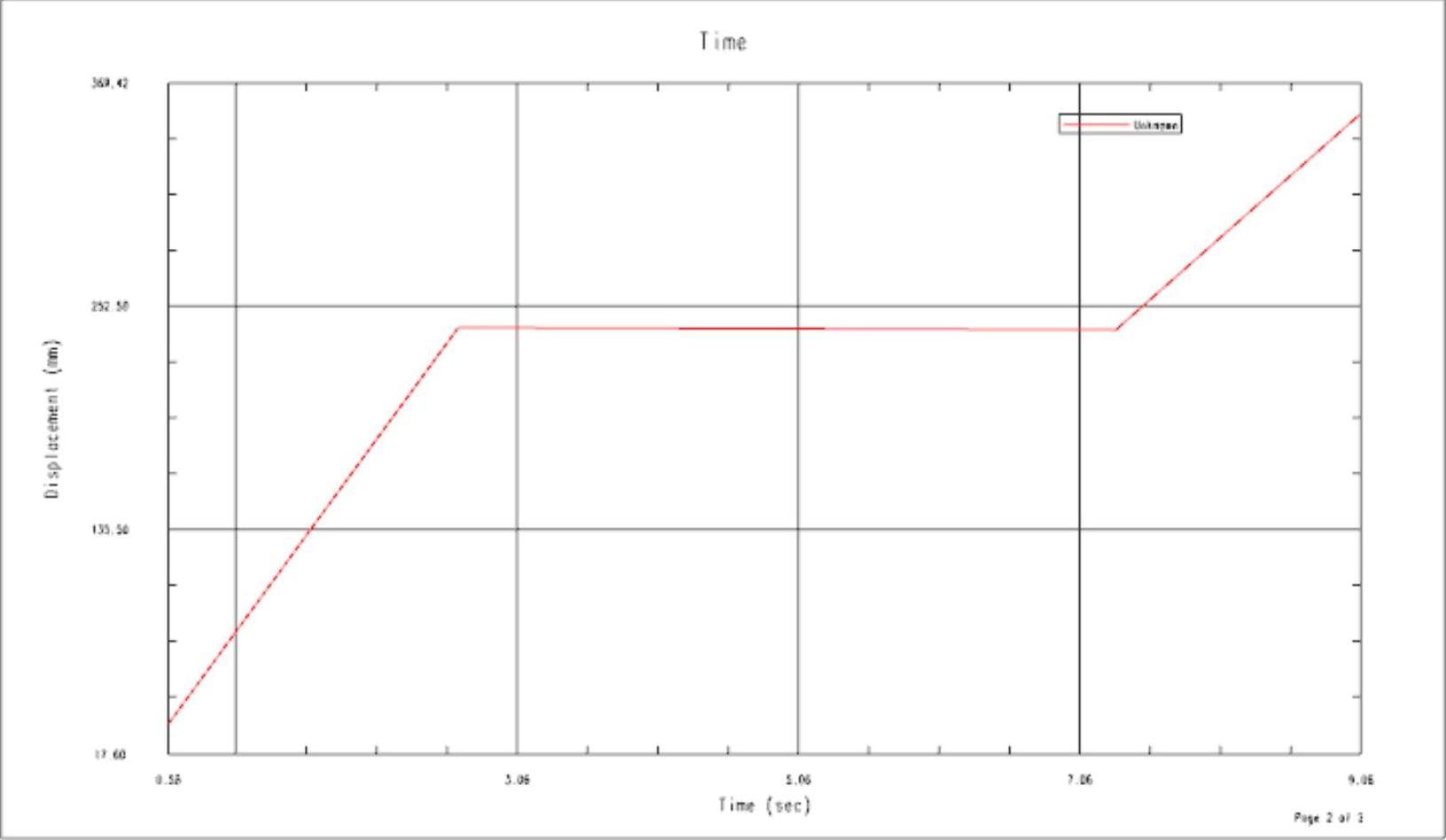
图7.3.41 驱动函数图形
(1)选择下拉菜单

 命令,系统弹出“解算方案”对话框;在
命令,系统弹出“解算方案”对话框;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 文本框中输入值10;在
文本框中输入值10;在 文本框中输入值1000;选中对话框中的
文本框中输入值1000;选中对话框中的 复选框。
复选框。
(2)设置重力方向。在“解算方案”对话框 区域的矢量下拉列表中选择
区域的矢量下拉列表中选择 选项,其他重力参数按系统默认设置值。
选项,其他重力参数按系统默认设置值。
(3)单击 按钮,完成解算方案的定义。
按钮,完成解算方案的定义。
Step9.定义动画。在“动画控制”工具条中单击“播放”按钮 ,查看机构运动;单击“导出至电影”按钮
,查看机构运动;单击“导出至电影”按钮 ,输入名称“lattice_asm”,保存动画;单击“完成动画”按钮
,输入名称“lattice_asm”,保存动画;单击“完成动画”按钮 。
。
Step10.选择下拉菜单

 命令,保存模型。
命令,保存模型。
4.使用波形扫掠
“波形扫掠”工具可以使用正弦波形、余弦波形、正方形波形和已过滤正方形波形来创建AFU表格驱动。
下面举例说明使用波形扫掠驱动的应用。在图7.3.42所示的机构中,模拟翅片在卡槽内的振动,采用正方形波形定义的AFU表格驱动旋转副的角度。
Step1.打开装配模型。打开文件D:\ug10.16\work\ch07.03.04.04\waveform_asm.prt。
Step2.进入运动仿真模块。选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建运动仿真文件。在“运动导航器”中右击waveform_asm节点,在系统弹出的快捷菜单中选择 命令,系统弹出“环境”对话框。
命令,系统弹出“环境”对话框。
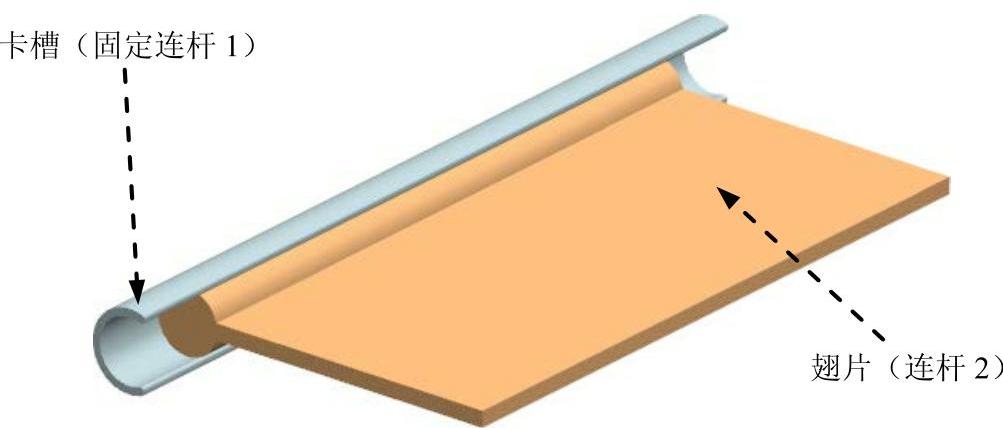
图7.3.42 机构模型
Step4.设置运动环境。在“环境”对话框中的 区域选中
区域选中 单选项;取消选中
单选项;取消选中 区域中的3个复选框;选中对话框中的
区域中的3个复选框;选中对话框中的 复选框;在
复选框;在 下方的文本框中采用默认的仿真名称“motion_1”;单击
下方的文本框中采用默认的仿真名称“motion_1”;单击 按钮。
按钮。
Step5.定义固定连杆1。选择下拉菜单

 命令,系统弹出“连杆”对话框;选取图7.3.42所示的卡槽为固定连杆1;在
命令,系统弹出“连杆”对话框;选取图7.3.42所示的卡槽为固定连杆1;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中选中
区域中选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L001”;单击
文本框中采用默认的连杆名称“L001”;单击 按钮,完成固定连杆1的定义。
按钮,完成固定连杆1的定义。
Step6.定义连杆2。选取图7.3.42所示的翅片为连杆2;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L002”;单击
文本框中采用默认的连杆名称“L002”;单击 按钮,完成连杆2的定义。
按钮,完成连杆2的定义。
Step7.定义连杆2中的旋转副。
(1)定义旋转副。选择下拉菜单

 命令,系统弹出“运动副”对话框;在“运动副”对话框
命令,系统弹出“运动副”对话框;在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择 选项;在模型中选取图7.3.43所示的边线为参考,系统自动选择连杆、原点及矢量方向。
选项;在模型中选取图7.3.43所示的边线为参考,系统自动选择连杆、原点及矢量方向。
(2)定义函数驱动。
①单击“运动副”对话框中的 选项卡;在
选项卡;在 下拉列表中选择
下拉列表中选择 选项。
选项。
②在 下拉列表中选择
下拉列表中选择 选项;单击
选项;单击 后的
后的 按钮,选择
按钮,选择 选项,系统弹出“XY函数管理器”对话框。
选项,系统弹出“XY函数管理器”对话框。
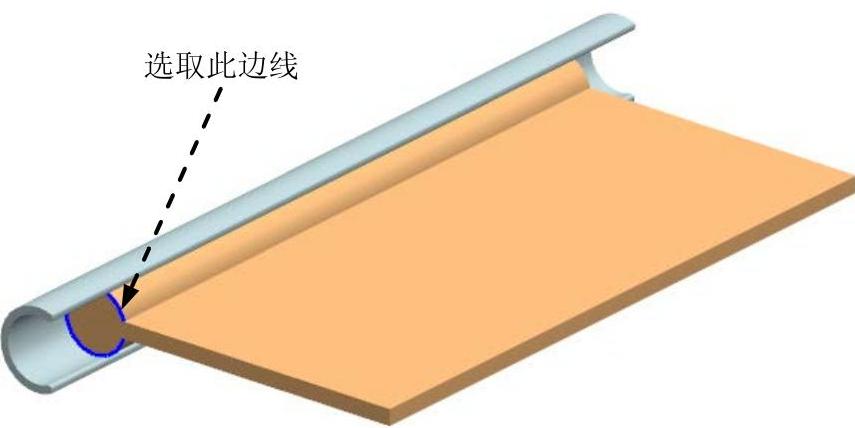
图7.3.43 定义旋转副
③在“XY函数管理器”对话框的 区域中选中
区域中选中 单选项,单击新建按钮
单选项,单击新建按钮 ,系统弹出“XY函数编辑器”对话框。
,系统弹出“XY函数编辑器”对话框。
④单击“XY轴定义”按钮 ,在
,在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项。
选项。
⑤单击“XY数据”按钮 ,在
,在 区域
区域 下方的文本框中输入值0,在
下方的文本框中输入值0,在 文本框中输入值0.02,在
文本框中输入值0.02,在 文本框中输入值500。
文本框中输入值500。
⑥单击 区域中的“波形扫掠”按钮
区域中的“波形扫掠”按钮 ,在系统弹出的“波形扫掠创建”对话框中设置图7.3.44所示的参数。
,在系统弹出的“波形扫掠创建”对话框中设置图7.3.44所示的参数。
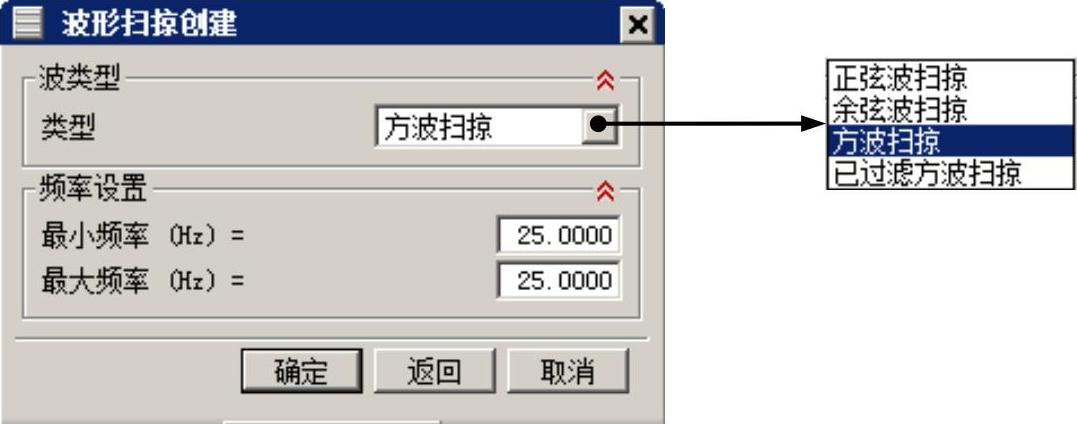
图7.3.44 “波形扫掠创建”对话框
说明:
●在“XY函数编辑器”对话框中单击 区域中的“预览”按钮
区域中的“预览”按钮 ,即可预览函数的图形。
,即可预览函数的图形。
●在“XY函数编辑器”对话框中单击“绘图”按钮 ,可以在图形区中显示具体的函数图形,如图7.3.45所示;在“布局管理器”工具条中单击“返回到模型”按钮
,可以在图形区中显示具体的函数图形,如图7.3.45所示;在“布局管理器”工具条中单击“返回到模型”按钮 ,可以返回到运动仿真环境。
,可以返回到运动仿真环境。
(3)单击 按钮4次,完成运动副及驱动的定义。
按钮4次,完成运动副及驱动的定义。
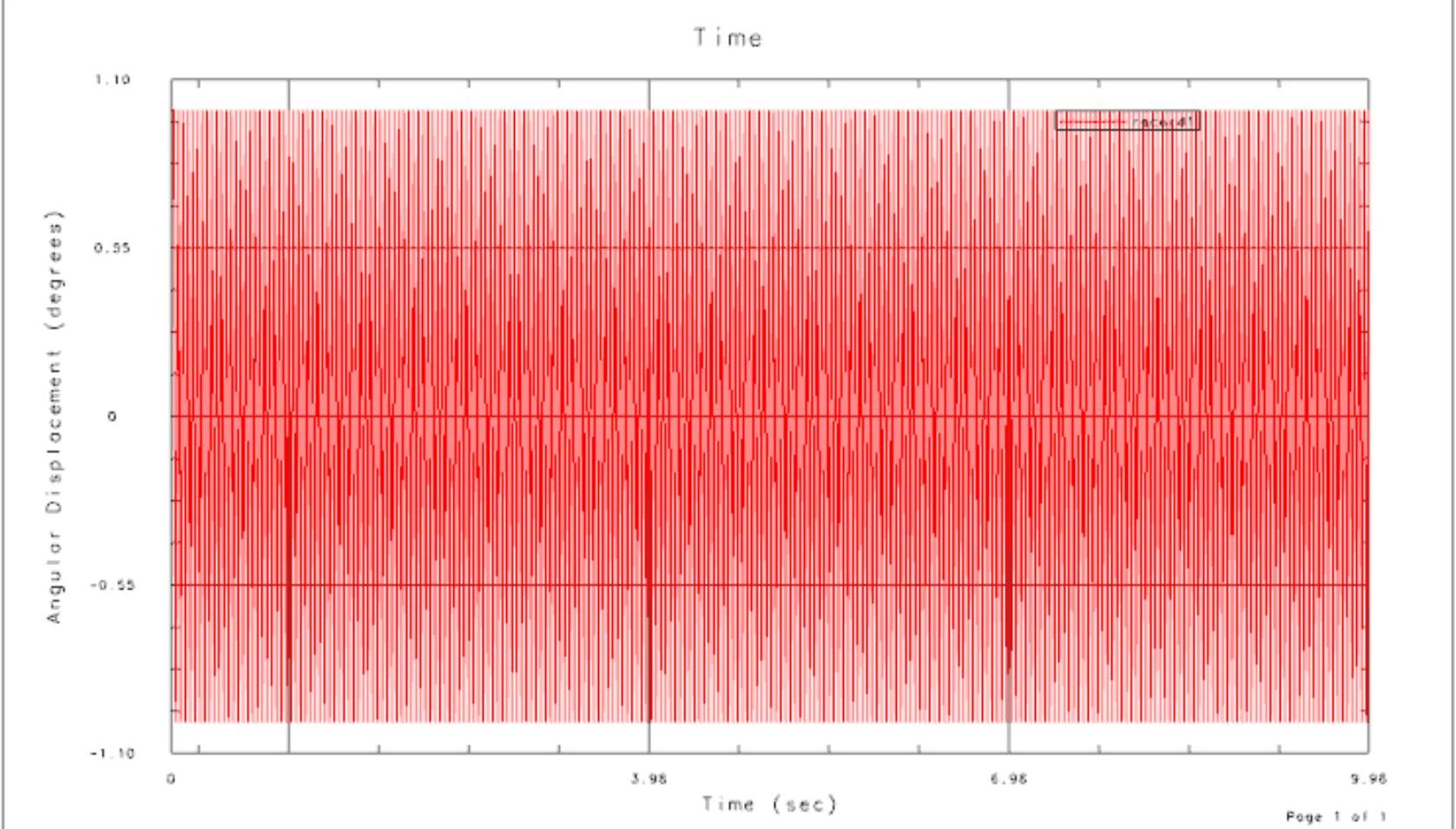
图7.3.45 函数图形
Step8.定义解算方案并求解。选择下拉菜单

 命令,系统弹出“解算方案”对话框;在
命令,系统弹出“解算方案”对话框;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 文本框中输入值10;在
文本框中输入值10;在 文本框中输入值1000;选中对话框中的
文本框中输入值1000;选中对话框中的 复选框;单击
复选框;单击 按钮,完成解算方案的定义。
按钮,完成解算方案的定义。
Step9.定义动画。在“动画控制”工具条中单击“播放”按钮 ,查看机构运动;单击“导出至电影”按钮
,查看机构运动;单击“导出至电影”按钮 ,输入名称“waveform_asm”,保存动画;单击“完成动画”按钮
,输入名称“waveform_asm”,保存动画;单击“完成动画”按钮 。
。
Step10.选择下拉菜单

 命令,保存模型。
命令,保存模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。