



数学函数驱动使用数学和编程语言中的函数来定义驱动,常用的有绝对值函数ABS(X)、正弦函数SIN(X)和余弦函数COS(X)。
下面举例说明数学函数驱动的应用。在图7.3.5所示的机构中,定义滑块在导轨上的位移呈余弦变化。

图7.3.5 机构模型
Step1.打开装配模型。打开文件D:\ug10.16\work\ch07.03.02\cos_asm.prt。
Step2.进入运动仿真模块。选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建运动仿真文件。在“运动导航器”中右击cos_asm节点,在系统弹出的快捷菜单中选择 命令,系统弹出“环境”对话框。
命令,系统弹出“环境”对话框。
Step4.设置运动环境。在“环境”对话框中的 区域选中
区域选中 单选项,取消选中
单选项,取消选中 区域中的3个复选框,选中对话框中的
区域中的3个复选框,选中对话框中的 复选框,在
复选框,在 下方的文本框中采用默认的仿真名称“motion_1”,单击
下方的文本框中采用默认的仿真名称“motion_1”,单击 按钮。
按钮。
Step5.定义固定连杆1。选择下拉菜单

 命令,系统弹出“连杆”对话框;选取图7.3.5所示的导轨为固定连杆1,在
命令,系统弹出“连杆”对话框;选取图7.3.5所示的导轨为固定连杆1,在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 区域中选中
区域中选中 复选框,在
复选框,在 文本框中采用默认的连杆名称“L001”,单击
文本框中采用默认的连杆名称“L001”,单击 按钮,完成固定连杆1的定义。
按钮,完成固定连杆1的定义。
Step6.定义连杆2。选取图7.3.5所示的滑块为连杆2;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L002”;单击
文本框中采用默认的连杆名称“L002”;单击 按钮,完成连杆2的定义。
按钮,完成连杆2的定义。
Step7.定义连杆2中的滑动副。
(1)定义滑动副。选择下拉菜单

 命令,系统弹出“运动副”对话框;在“运动副”对话框
命令,系统弹出“运动副”对话框;在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择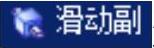 选项;在模型中选取图7.3.6所示的边线为参考,系统自动选择连杆、原点及矢量方向。
选项;在模型中选取图7.3.6所示的边线为参考,系统自动选择连杆、原点及矢量方向。
图7.3.6 定义滑动副
(2)定义函数驱动。
①单击“运动副”对话框中的 选项卡;在
选项卡;在 下拉列表中选择
下拉列表中选择 选项。
选项。
②在 下拉列表中选择
下拉列表中选择 选项;单击
选项;单击 后的
后的 按钮,选择
按钮,选择 选项,系统弹出“XY函数管理器”对话框。
选项,系统弹出“XY函数管理器”对话框。
③单击“XY函数管理器”对话框中的“新建”按钮 ,系统弹出“XY函数编辑器”对话框。
,系统弹出“XY函数编辑器”对话框。
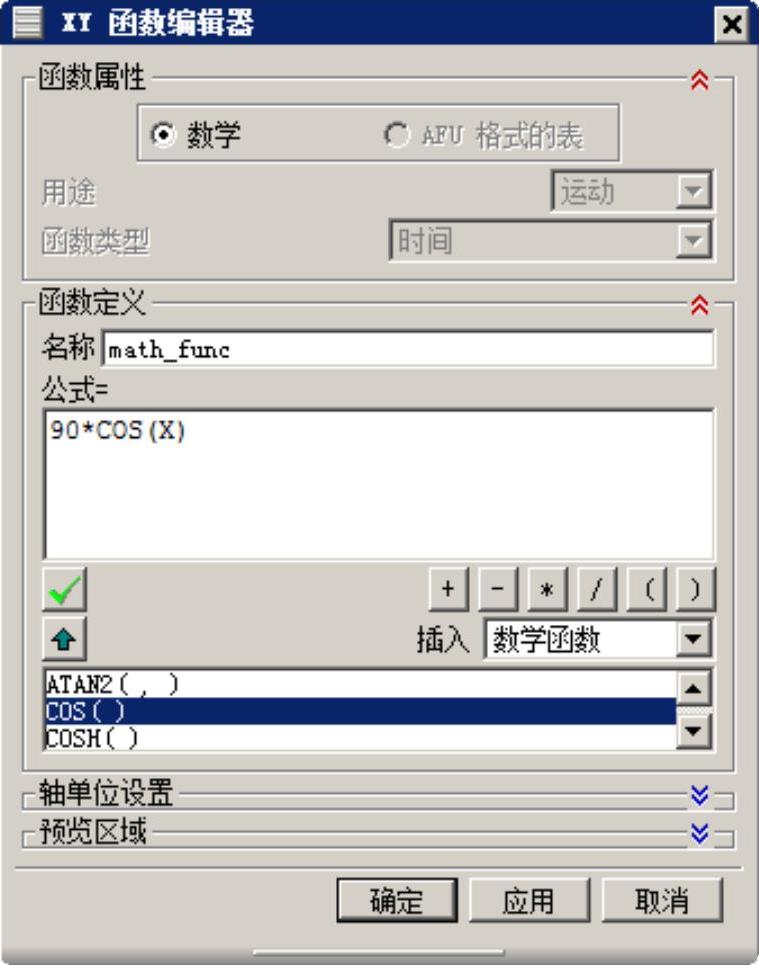
④在“XY函数编辑器”对话框的函数列表区域双击余弦函数 ,在
,在 区域的文本框中修改函数表达式为“90*COS(X)”,如图7.3.7所示。
区域的文本框中修改函数表达式为“90*COS(X)”,如图7.3.7所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图7.3.7 定义余弦函数
⑤单击“XY函数编辑器”对话框 中的“预览”按钮
中的“预览”按钮 ,查看函数的图形,如图7.3.8所示。
,查看函数的图形,如图7.3.8所示。
说明:
●在“XY函数编辑器”对话框中单击“预览”按钮 ,即可预览函数的图形,在图形区空白处单击,预览图形会消失。
,即可预览函数的图形,在图形区空白处单击,预览图形会消失。
●在“XY函数编辑器”对话框中单击“绘图”按钮 ,可以在图形区中显示具体的函数图形,如图7.3.9所示;在图7.3.10所示的“布局管理器”工具条中单击“返回到模型”按钮
,可以在图形区中显示具体的函数图形,如图7.3.9所示;在图7.3.10所示的“布局管理器”工具条中单击“返回到模型”按钮 ,可以返回到运动仿真环境。
,可以返回到运动仿真环境。
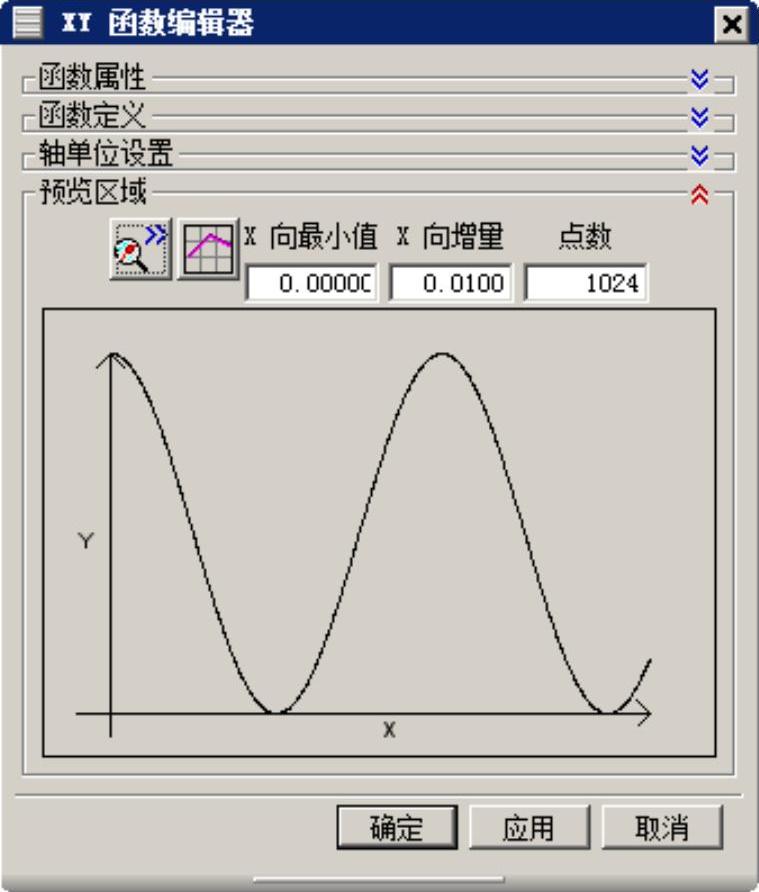
图7.3.8 预览函数图形
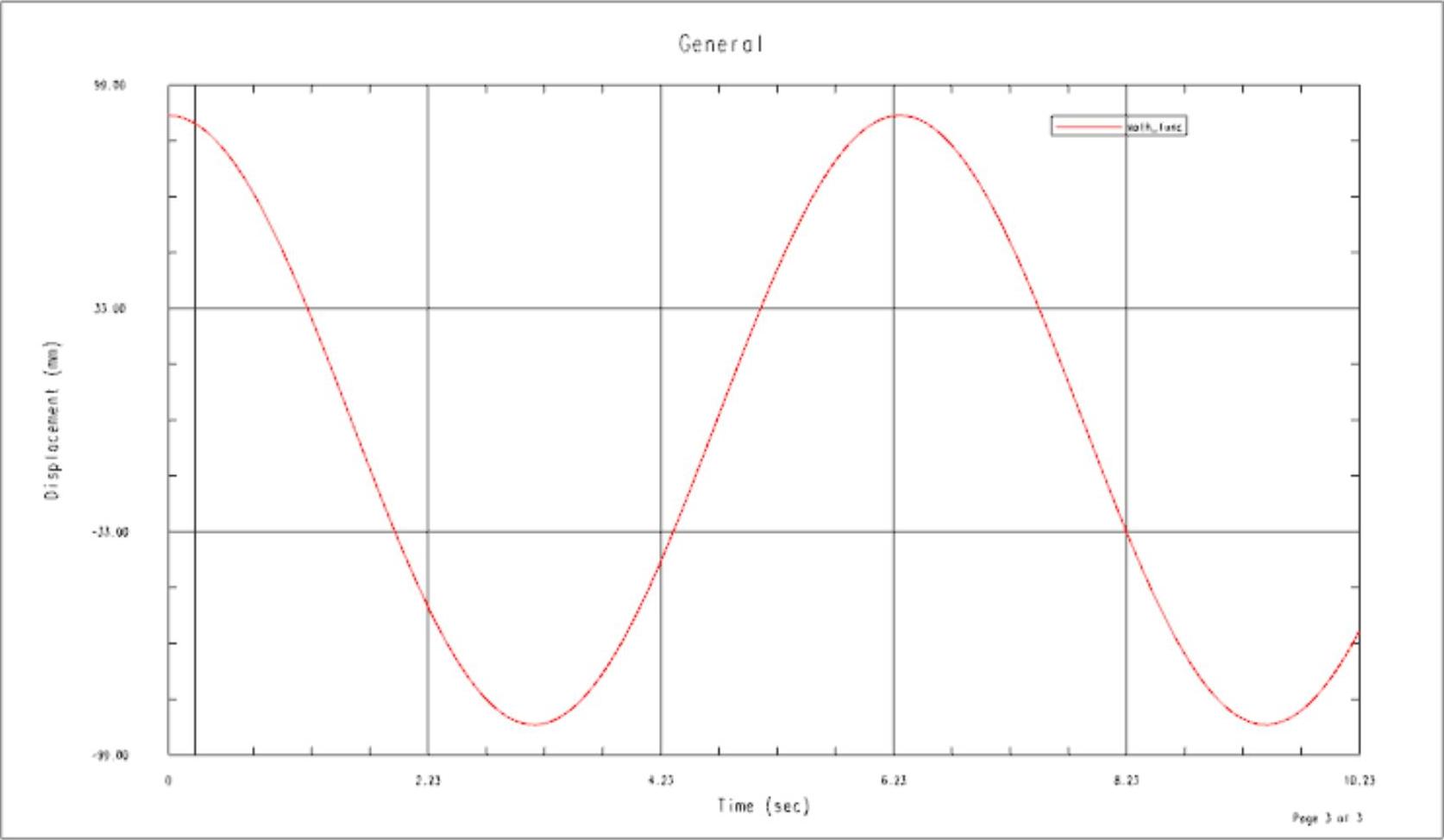
图7.3.9 函数图形

图7.3.10 “布局管理器”工具条
(3)单击 按钮3次,完成运动副及驱动的定义。
按钮3次,完成运动副及驱动的定义。
Step8.定义解算方案并求解。
(1)选择下拉菜单

 命令,系统弹出“解算方案”对话框;在
命令,系统弹出“解算方案”对话框;在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 文本框中输入值20,在
文本框中输入值20,在 文本框中输入值400,选中对话框中的
文本框中输入值400,选中对话框中的 复选框。
复选框。
(2)设置重力方向。在“解算方案”对话框 区域的矢量下拉列表中选择
区域的矢量下拉列表中选择 选项,其他重力参数按系统默认设置值。
选项,其他重力参数按系统默认设置值。
(3)单击 按钮,完成解算方案的定义。
按钮,完成解算方案的定义。
Step9.定义动画。在“动画控制”工具条中单击“播放”按钮 ,查看机构运动;单击“导出至电影”按钮
,查看机构运动;单击“导出至电影”按钮 ,输入名称“cos_asm”,保存动画;单击“完成动画”按钮
,输入名称“cos_asm”,保存动画;单击“完成动画”按钮 。
。
Step10.选择下拉菜单

 命令,保存模型。
命令,保存模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。