



2D接触可以用于平面中的曲线接触仿真,它结合了线在线上约束类型和碰撞载荷类型的特点,允许用户设置作用在连杆上的两条平面曲线之间的碰撞载荷。定义2D接触时,可以将其设置在连杆上的两条平面曲线之间。2D接触与线在线上约束类似,不同的是线在线上约束定义的对象始终是接触的,不管运动如何变化,定义对象始终不会脱离。
2D接触可以用于凸轮机构的仿真,如果使用线在线上约束定义凸轮机构,滚轮和凸轮之间是没有摩擦力的,这与实际不符,因此,可以滚轮和凸轮之间添加2D接触,并能设置滚轮和凸轮在运动过程中的摩擦。下面以图6.5.1所示的凸轮压杆机构为例,说明定义2D接触的一般操作过程。
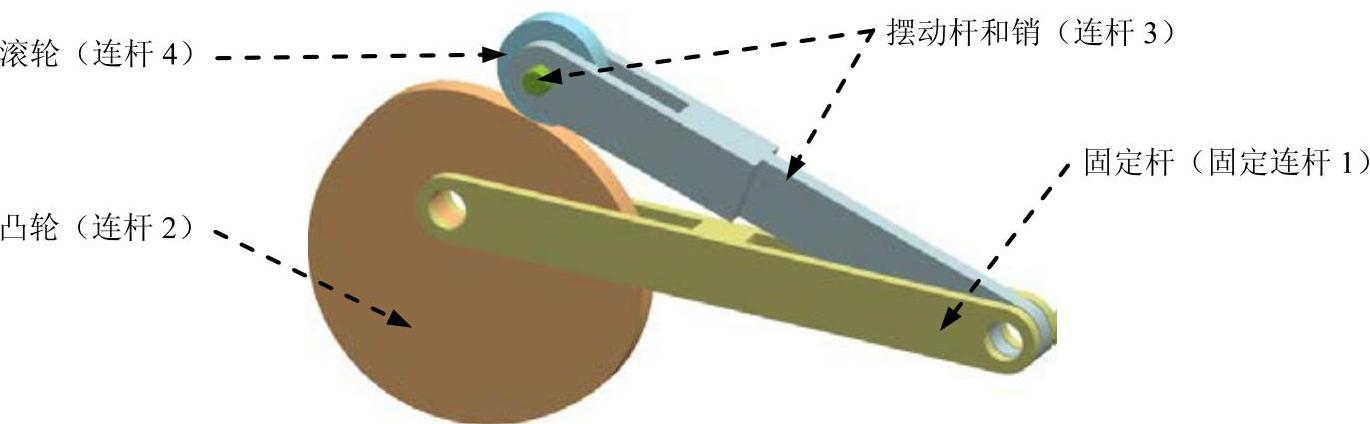
图6.5.1 机构模型
Step1.打开装配模型。打开文件D:\ug10.16\work\ch06.05\cam_mech.prt。
Step2.进入运动仿真模块。选择

 命令,进入运动仿真模块。
命令,进入运动仿真模块。
Step3.新建运动仿真文件。在“运动导航器”中右击cam_mech节点,在系统弹出的快捷菜单中选择 命令,系统弹出“环境”对话框。
命令,系统弹出“环境”对话框。
Step4.设置运动环境。在“环境”对话框中的 区域选中
区域选中 单选项;取消选中
单选项;取消选中 区域中的3个复选框;选中对话框中的
区域中的3个复选框;选中对话框中的 复选框;在
复选框;在 下方的文本框中采用默认的仿真名称“motion_1”;单击
下方的文本框中采用默认的仿真名称“motion_1”;单击 按钮。
按钮。
Step5.定义固定连杆1。选择下拉菜单

 命令,系统弹出“连杆”对话框;选取图6.5.1所示的固定杆为连杆1;在
命令,系统弹出“连杆”对话框;选取图6.5.1所示的固定杆为连杆1;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中选中
区域中选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L001”;单击
文本框中采用默认的连杆名称“L001”;单击 按钮,完成固定连杆1的定义。
按钮,完成固定连杆1的定义。
Step6.定义连杆2。选取图6.5.1所示的凸轮为连杆2;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L002”;单击
文本框中采用默认的连杆名称“L002”;单击 按钮,完成连杆2的定义。
按钮,完成连杆2的定义。
Step7.定义连杆3。选取图6.5.1所示的摆动杆和销为连杆3;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L003”;单击
文本框中采用默认的连杆名称“L003”;单击 按钮,完成连杆3的定义。
按钮,完成连杆3的定义。
Step8.定义连杆4。选取图6.5.1所示的滚轮为连杆4;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域中取消选中
区域中取消选中 复选框;在
复选框;在 文本框中采用默认的连杆名称“L004”;单击
文本框中采用默认的连杆名称“L004”;单击 按钮,完成连杆4的定义。
按钮,完成连杆4的定义。
Step9.定义连杆2中的旋转副。
(1)选择下拉菜单

 命令,系统弹出“运动副”对话框;在“运动副”对话框
命令,系统弹出“运动副”对话框;在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择 选项;选取图6.5.2所示的连杆2为参考连杆;在“运动副”对话框
选项;选取图6.5.2所示的连杆2为参考连杆;在“运动副”对话框 区域的
区域的 下拉列表中选择“圆弧中心”
下拉列表中选择“圆弧中心” 选项,在模型中选取图6.5.2所示的圆弧边线为原点参考;在
选项,在模型中选取图6.5.2所示的圆弧边线为原点参考;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,在矢量下拉列表中选择
选项,在矢量下拉列表中选择 选项。
选项。
(2)单击“运动副”对话框中的 选项卡;在
选项卡;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 文本框中输入值112。
文本框中输入值112。
(3)单击 按钮,完成旋转副的创建。
按钮,完成旋转副的创建。

图6.5.2 定义连杆2中的旋转副
Step10.定义连杆3中的旋转副。选择下拉菜单

 命令,系统弹出“运动副”对话框;在“运动副”对话框
命令,系统弹出“运动副”对话框;在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择 选项;选取图6.5.3所示的连杆3为参考连杆;在“运动副”对话框
选项;选取图6.5.3所示的连杆3为参考连杆;在“运动副”对话框 区域的
区域的 下拉列表中选择“圆弧中心”
下拉列表中选择“圆弧中心” 选项,在模型中选取图6.5.3所示的圆弧边线为原点参考;在
选项,在模型中选取图6.5.3所示的圆弧边线为原点参考;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,在模型中选取图6.5.3所示的面为矢量参考;单击
选项,在模型中选取图6.5.3所示的面为矢量参考;单击 按钮,完成旋转副的创建。
按钮,完成旋转副的创建。
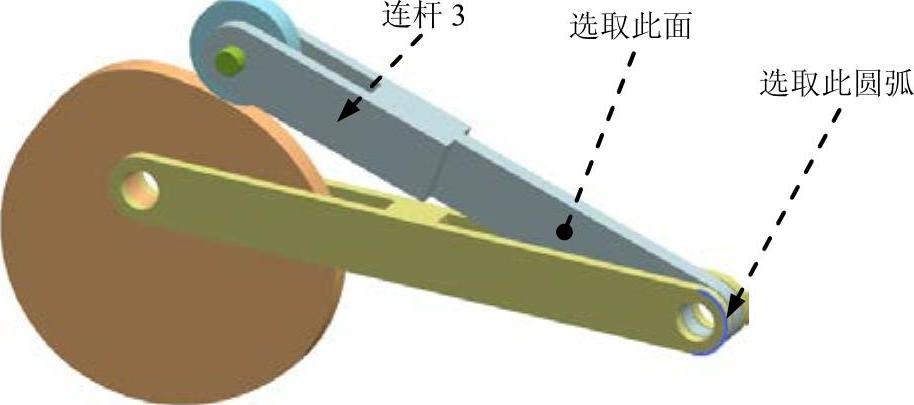
图6.5.3 定义连杆3中的旋转副
Step11.定义连杆3和连杆4中的旋转副。
(1)选择下拉菜单

 命令,系统弹出“运动副”对话框;在“运动副”对话框
命令,系统弹出“运动副”对话框;在“运动副”对话框 选项卡的
选项卡的 下拉列表中选择
下拉列表中选择 选项;选取图6.5.4所示的连杆3为参考连杆;在“运动副”对话框
选项;选取图6.5.4所示的连杆3为参考连杆;在“运动副”对话框 区域的
区域的 下拉列表中选择“圆弧中心”
下拉列表中选择“圆弧中心” 选项,在模型中选取图6.5.4所示的圆弧边线为原点参考;在
选项,在模型中选取图6.5.4所示的圆弧边线为原点参考;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,在模型中选取图6.5.4所示的曲面为矢量参考。
选项,在模型中选取图6.5.4所示的曲面为矢量参考。
(2)在“运动副”对话框的 区域中选中
区域中选中 复选框;单击
复选框;单击 区域中的
区域中的 按钮,选取图6.5.4所示的连杆4为啮合连杆;在
按钮,选取图6.5.4所示的连杆4为啮合连杆;在 区域的
区域的 下拉列表中选择“圆弧中心”
下拉列表中选择“圆弧中心” 选项,在模型中选取图6.5.4所示的圆弧边线为原点参考;在
选项,在模型中选取图6.5.4所示的圆弧边线为原点参考;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,在模型中选取图6.5.4所示的曲面为矢量参考。(https://www.xing528.com)
选项,在模型中选取图6.5.4所示的曲面为矢量参考。(https://www.xing528.com)
(3)单击 按钮,完成旋转副的创建。
按钮,完成旋转副的创建。
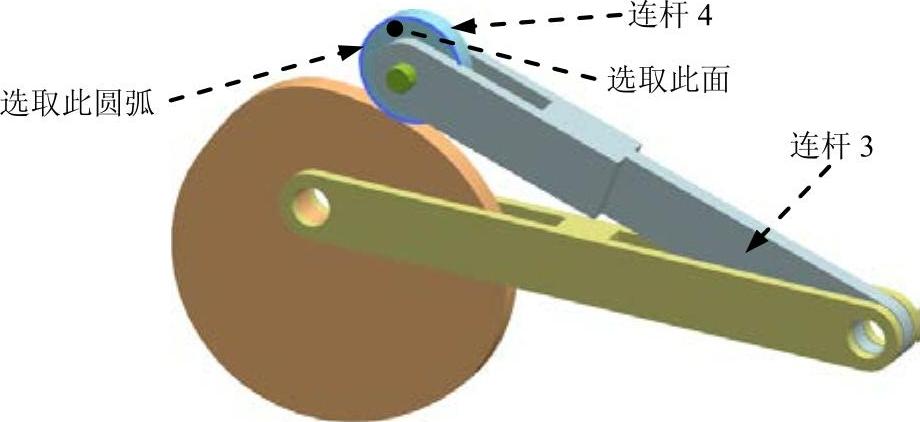
图6.5.4 定义旋转副
Step12.定义2D接触。
(1)选择下拉菜单



 命令,系统弹出图6.5.5所示的“2D接触”对话框。
命令,系统弹出图6.5.5所示的“2D接触”对话框。
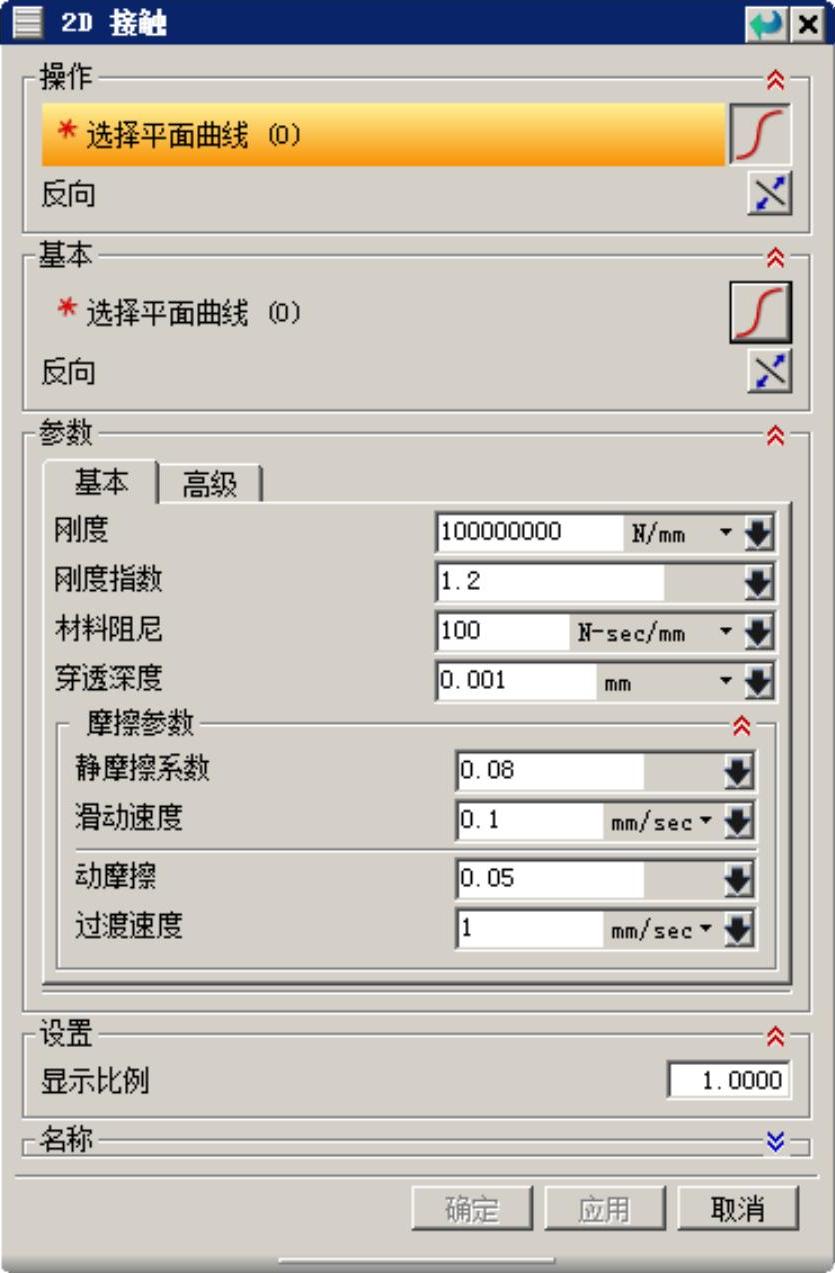
图6.5.5 “2D接触”对话框
(2)定义接触曲线。单击对话框 区域中的
区域中的 按钮,选取图6.5.6所示的曲线1为操作曲线;单击对话框
按钮,选取图6.5.6所示的曲线1为操作曲线;单击对话框 区域中的
区域中的 按钮,选取图6.5.6所示的曲线2为基本曲线,如有必要,单击反向按钮
按钮,选取图6.5.6所示的曲线2为基本曲线,如有必要,单击反向按钮 ,使两曲线的材料侧箭头如图6.5.7所示。
,使两曲线的材料侧箭头如图6.5.7所示。
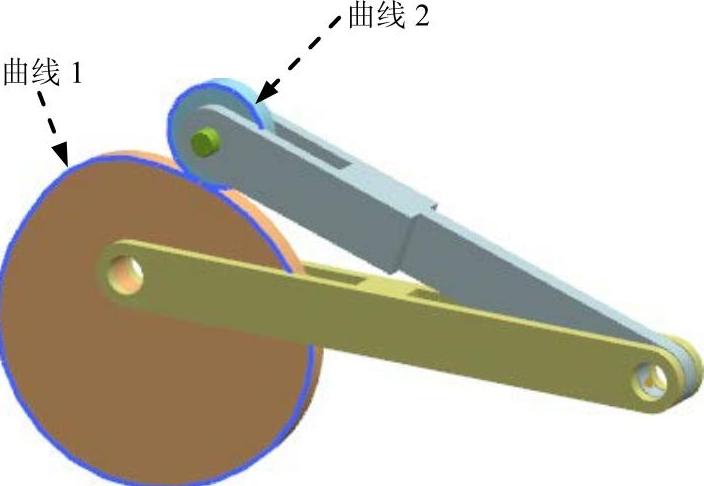
图6.5.6 定义接触曲线
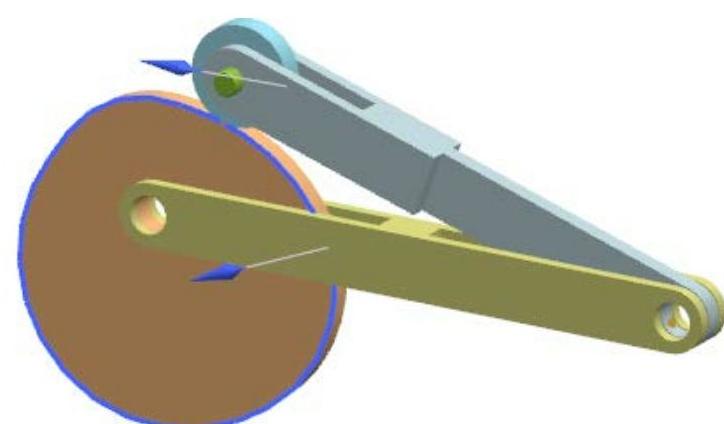
图6.5.7 定义材料侧箭头方向
(3)定义基本参数。单击 区域中的
区域中的 选项卡,设置图6.5.5所示的参数。
选项卡,设置图6.5.5所示的参数。
(4)定义高级参数。单击 区域中的
区域中的 选项卡,设置图6.5.8所示的参数。
选项卡,设置图6.5.8所示的参数。
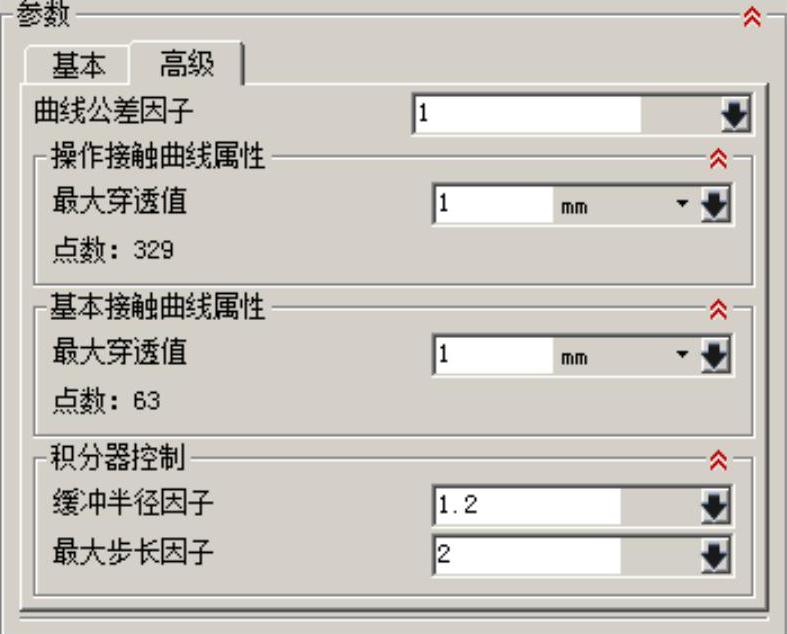
图6.5.8 定义参数
(5)单击 按钮,完成2D接触的定义。
按钮,完成2D接触的定义。
Step13.定义解算方案并求解。
(1)选择下拉菜单

 命令,系统弹出“解算方案”对话框;在
命令,系统弹出“解算方案”对话框;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 文本框中输入值15;在
文本框中输入值15;在 文本框中输入值300;选中对话框中的
文本框中输入值300;选中对话框中的 复选框。
复选框。
(2)设置重力方向。在“解算方案”对话框 区域的矢量下拉列表中选择
区域的矢量下拉列表中选择 选项,其他重力参数按系统默认设置值。
选项,其他重力参数按系统默认设置值。
(3)单击 按钮,完成解算方案的定义。
按钮,完成解算方案的定义。
Step14.定义动画。在“动画控制”工具条中单击“播放”按钮 ,查看机构运动;单击“导出至电影”按钮
,查看机构运动;单击“导出至电影”按钮 ,输入名称“cam_mech”,保存动画;单击“完成动画”按钮
,输入名称“cam_mech”,保存动画;单击“完成动画”按钮 。
。
Step15.选择下拉菜单

 命令,保存模型。
命令,保存模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。