



【摘要】:在UG运动仿真中,系统还提供了一些其他的运动副与约束,下面进行简要说明。单个固定的连杆可以在定义连杆时直接在“连杆”对话框的区域中选中复选框,系统会自动为连杆加上固定副。图4.12.1 定义固定连杆2.等速等速连接与万向节类似,也可以定义两个成一定角度的连杆以一点为参考进行转动。
在UG运动仿真中,系统还提供了一些其他的运动副与约束,下面进行简要说明。
1.固定副
固定副就是将连杆完全固定,固定的连杆没有自由度。单个固定的连杆在机构运动时保持静止,如果是两个连杆啮合固定,则这两个连杆之间没有相对运动,但是它们可以作为一个整体相对于其他连杆进行运动,也可以在创建连杆时,将这两个连杆的实体同时选择成为一个连杆。
单个固定的连杆可以在定义连杆时直接在“连杆”对话框的 区域中选中
区域中选中 复选框(图4.12.1),系统会自动为连杆加上固定副。
复选框(图4.12.1),系统会自动为连杆加上固定副。
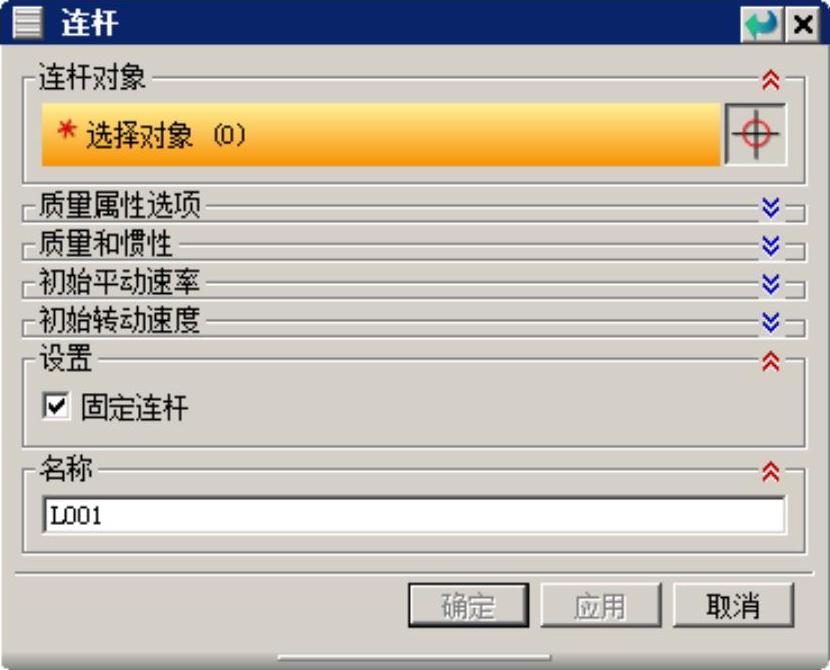
图4.12.1 定义固定连杆
2.等速
等速连接与万向节类似,也可以定义两个成一定角度的连杆以一点为参考进行转动。所不同的是万向节一般用在常见的十字轴万向节传动的仿真中,但是当十字轴万向节的主动轴与传动轴之间有夹角时,不能等速传递而产生转角差,使主、从动轴的角度周期性的不相等,因此十字轴万向节是不等速传动;而等速连接可以模拟当主、从动轴的角速度在两轴之间的夹角变动时仍然保持相等,所以等速连接常用于等速万向节的运动仿真,常见的有等速万向节有球笼式、球叉式、双联式、凸块式和三销式等。
3.共点
共点约束可以定义运动仿真时两连杆中的点重合。(https://www.xing528.com)
4.共线
共线约束可以定义运动仿真时两连杆中的边线或轴线重合。
5.共面
共面约束可以定义运动仿真时两连杆中的平面重合。
6.平行
平行约束可以定义运动仿真时两连杆中的平面或直线平行。
7.垂直
垂直约束可以定义运动仿真时两连杆中的平面或直线垂直。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。