



在UG NX运动仿真模块中,选择下拉菜单

 命令,系统弹出“运动首选项”对话框,如图1.3.1所示。该对话框主要用于设置运动仿真的环境参数,如运动对象的显示、单位、重力常数、求解器参数和后处理参数等。
命令,系统弹出“运动首选项”对话框,如图1.3.1所示。该对话框主要用于设置运动仿真的环境参数,如运动对象的显示、单位、重力常数、求解器参数和后处理参数等。

图1.3.1 “运动首选项”对话框
图1.3.1所示的“运动首选项”对话框中部分选项的说明如下。
● :该选项用于控制机构中的连杆、运动副以及其他对象的名称是否显示在图形区中,对于打开的机构对象和以后创建的对象均有效。
:该选项用于控制机构中的连杆、运动副以及其他对象的名称是否显示在图形区中,对于打开的机构对象和以后创建的对象均有效。
● :该选项用于控制机构对象图标的显示效果,选中该复选框后所有对象的图标会完整显示,而不会受到模型的遮挡,也不会受到模型的显示样式(如着色、线框等)的影响。
:该选项用于控制机构对象图标的显示效果,选中该复选框后所有对象的图标会完整显示,而不会受到模型的遮挡,也不会受到模型的显示样式(如着色、线框等)的影响。
● :该选项用于控制机构对象图标的显示比例,数值越大,机构中的运动副和驱动等图标的显示比例越大,修改比例后,对于机构中的现有对象和以后创建的对象均有效。
:该选项用于控制机构对象图标的显示比例,数值越大,机构中的运动副和驱动等图标的显示比例越大,修改比例后,对于机构中的现有对象和以后创建的对象均有效。
● :该选项用于设置机构中输入或显示的角度单位。单击下方的
:该选项用于设置机构中输入或显示的角度单位。单击下方的 按钮,系统会弹出一个信息窗口,在该窗口中会显示当前机构中的所有单位。值得注意的是,机构的单位制由创建的原始主模型决定,单击
按钮,系统会弹出一个信息窗口,在该窗口中会显示当前机构中的所有单位。值得注意的是,机构的单位制由创建的原始主模型决定,单击 按钮得到的信息窗口只供用户查看当前单位,而不能修改单位。
按钮得到的信息窗口只供用户查看当前单位,而不能修改单位。
● :该选项用于控制运动仿真时是否启动机构的质量属性,也就是机构中零件的质量、重心以及惯性等参数。如果是简单的位移分析,可以不考虑质量。但是在进行动力学分析时,必须启用质量属性。
:该选项用于控制运动仿真时是否启动机构的质量属性,也就是机构中零件的质量、重心以及惯性等参数。如果是简单的位移分析,可以不考虑质量。但是在进行动力学分析时,必须启用质量属性。
● :单击该按钮,系统弹出图1.3.2所示的“全局重力常数”对话框,在该对话框中可以设置重力的方向及大小。
:单击该按钮,系统弹出图1.3.2所示的“全局重力常数”对话框,在该对话框中可以设置重力的方向及大小。
 (https://www.xing528.com)
(https://www.xing528.com)
图1.3.2 “全局重力常数”对话框
● :单击该按钮,系统弹出图1.3.3所示的“求解器参数”对话框,在该对话框中可以设置运动仿真求解器的参数。求解器是用于解算运动仿真方案的工具,是一种基于积分和微分方程理论的数学计算软件。
:单击该按钮,系统弹出图1.3.3所示的“求解器参数”对话框,在该对话框中可以设置运动仿真求解器的参数。求解器是用于解算运动仿真方案的工具,是一种基于积分和微分方程理论的数学计算软件。
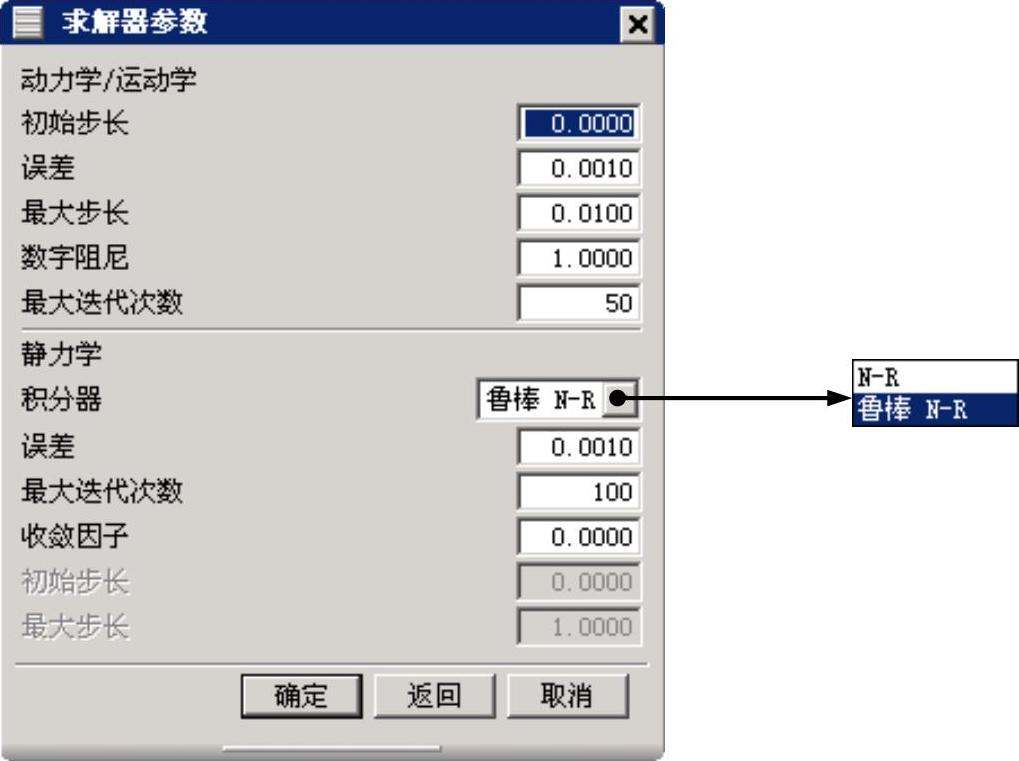
图1.3.3 “求解器参数”对话框
图1.3.3所示的“求解器参数”对话框中部分选项的说明如下。
●“求解器参数”对话框中的参数主要用于设置求解积分器的类型以及计算精度,精度设置越高,消耗的系统资源越多,计算时间越长。
●积分器的类型有两种。N-R(Newton-Raphson)积分器(使用牛顿迭代法的计算机程序)和鲁棒N-R(Robust Newton-Raphson)积分器。在进行静态力平衡问题分析时,最好选择鲁棒N-R积分器。
●最大步长用于设置积分和微分方程的dx因子,值越小,精度越高。
●最大迭代次数用于设置积分器的最大迭代次数,当解算器的迭代次数达到最大,计算结果与理论微分方程之间的误差未达到要求时,解算器结束求解。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。