



【摘要】:下面以图1.2.1所示的连杆机构模型为例,介绍进入UG NX运动仿真模块的操作方法。该机构已经完成一组运动仿真数据的运行,读者可以打开文件D:\ug10.16\work\ch01.02\linkage_mech_asm.avi查看机构运行视频。图1.2.1 连杆机构模型Step1.打开机构模型。在图1.2.3所示的运动导航器窗口右击,在图1.2.4所示的快捷菜单中选择命令。图1.2.4 快捷菜单完成上面的操作后,系统将显示图1.2.5所示的运动仿真界面。说明:如果读者的软件显示界面与图1.2.5所示的有差别,可能是由于软件的“角色”环境配置的不同所致。
下面以图1.2.1所示的连杆机构模型为例,介绍进入UG NX运动仿真模块的操作方法。在该机构模型中,各杆件之间进行销连接,当连杆1作为主动杆进行匀速转动时,同时带动连杆2和连杆3进行运动。该机构已经完成一组运动仿真数据的运行,读者可以打开文件D:\ug10.16\work\ch01.02\linkage_mech_asm.avi查看机构运行视频。
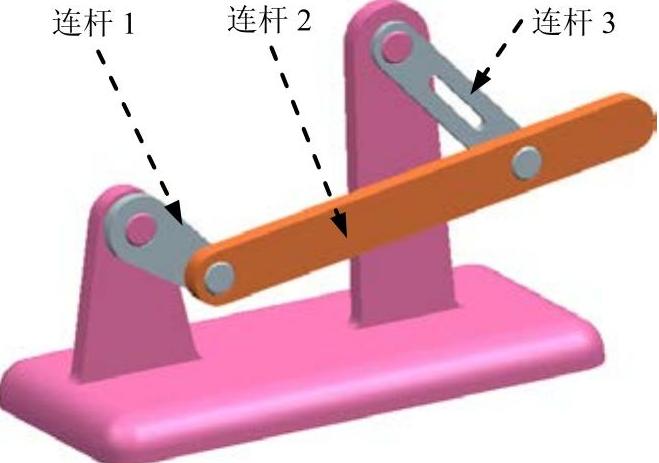
图1.2.1 连杆机构模型
Step1.打开机构模型。打开文件D:\ug10.16\work\ch01.02\linkage_mech_asm.prt。
Step2.进入运动仿真模块。选择

 命令,如图1.2.2所示,进入运动仿真模块。
命令,如图1.2.2所示,进入运动仿真模块。
说明:如果当前已处于运动仿真环境,则跳过Step2。
Step3.激活仿真数据。在图1.2.3所示的运动导航器窗口右击 ,在图1.2.4所示的快捷菜单中选择
,在图1.2.4所示的快捷菜单中选择 命令。
命令。
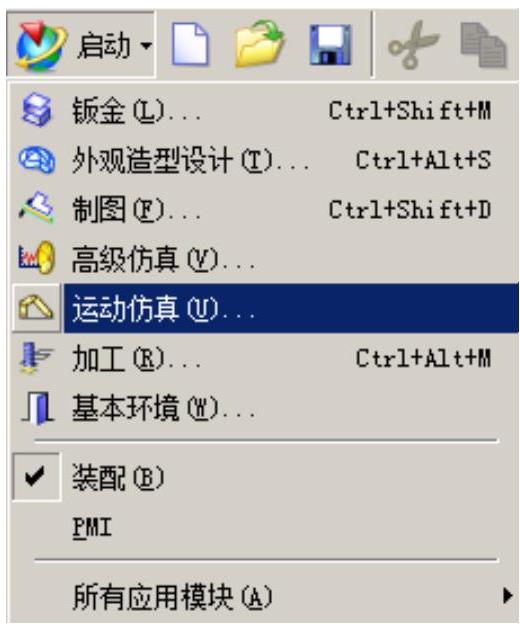
图1.2.2 “开始”菜单(https://www.xing528.com)
图1.2.3 运动导航器
图1.2.4 快捷菜单
完成上面的操作后,系统将显示图1.2.5所示的运动仿真界面。
说明:如果读者的软件显示界面与图1.2.5所示的有差别,可能是由于软件的“角色”环境配置的不同所致。本书的“角色”环境为“具有完整菜单的高级功能”,读者可以在导航资源条中单击“角色”按钮 ,并在“角色”导航器中选择相应的环境进行定制。
,并在“角色”导航器中选择相应的环境进行定制。
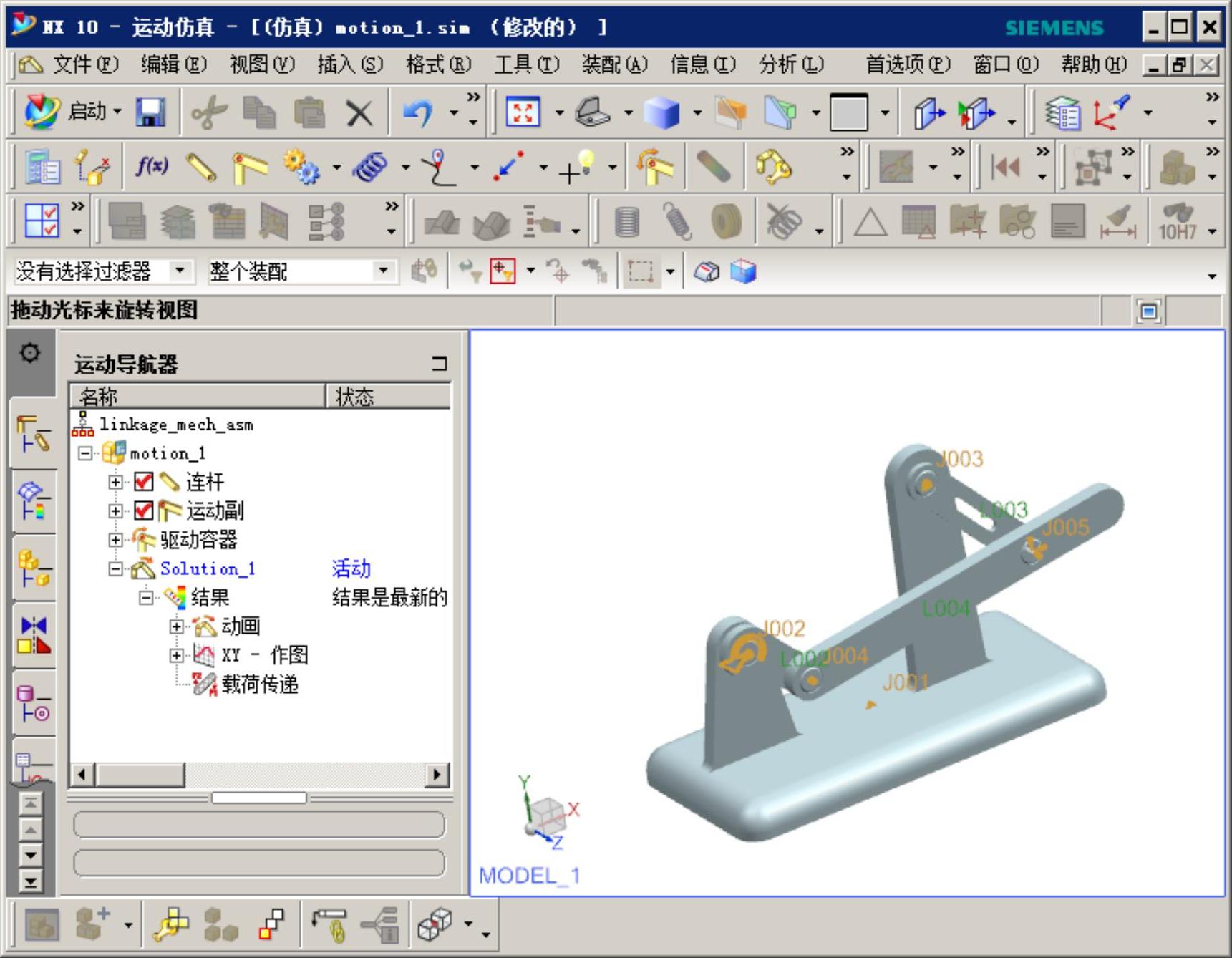
图1.2.5 运动仿真界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。