



高压共轨喷油系统中还有很多机械运动部件,特别是喷油器。针对这些机械运动部件需要建立相应的数学模型。下面所介绍的数学模型仅仅针对喷油器中的机械运动部件。如9-11图所示的喷油器,可以分为控制柱塞和针阀运动组件和高速电磁阀运动组件两部分。
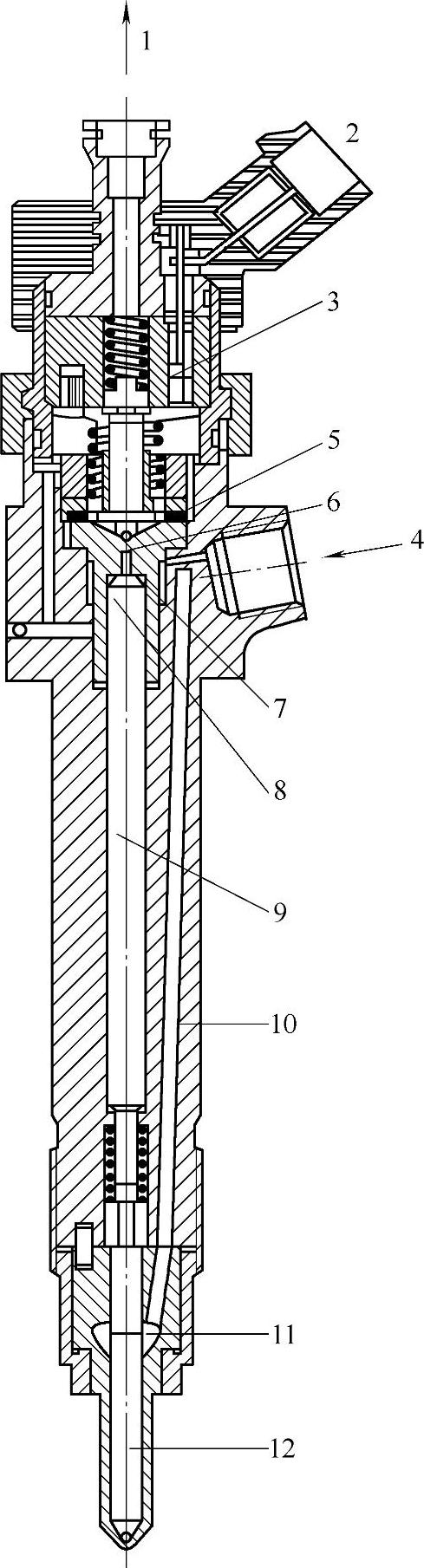
图9-11 典型高压共轨喷油器总成
1—低压回油孔 2—电气接头 3—电磁铁的线圈 4—高压燃油进口 5—钢球 6—出油节流孔 7—进油节流孔 8—控制腔 9—控制柱塞 10—高压油道 11—针阀盛油槽 12—针阀
1.控制柱塞和针阀运动组件的数学模型
首先来看如图9-12所示的控制柱塞和针阀运动组件的数学模型,如图9-12所示,这是2个自由度的弹簧—质量—阻尼振动系统,描述该系统的微分方程为

ln<0, ,
, ,
,
ln≥0,kn=kn,βn=βn,F0n=F0n
ltot<lmax, ,
, ,
,
ltot≥lmax, ,
, ,
,
 ,
,
式中 ltot——控制柱塞的位移lcp和针阀的位移ln之和;
lmax——控制柱塞的位移lcp和针阀的位移ln之和所允许的最大值;
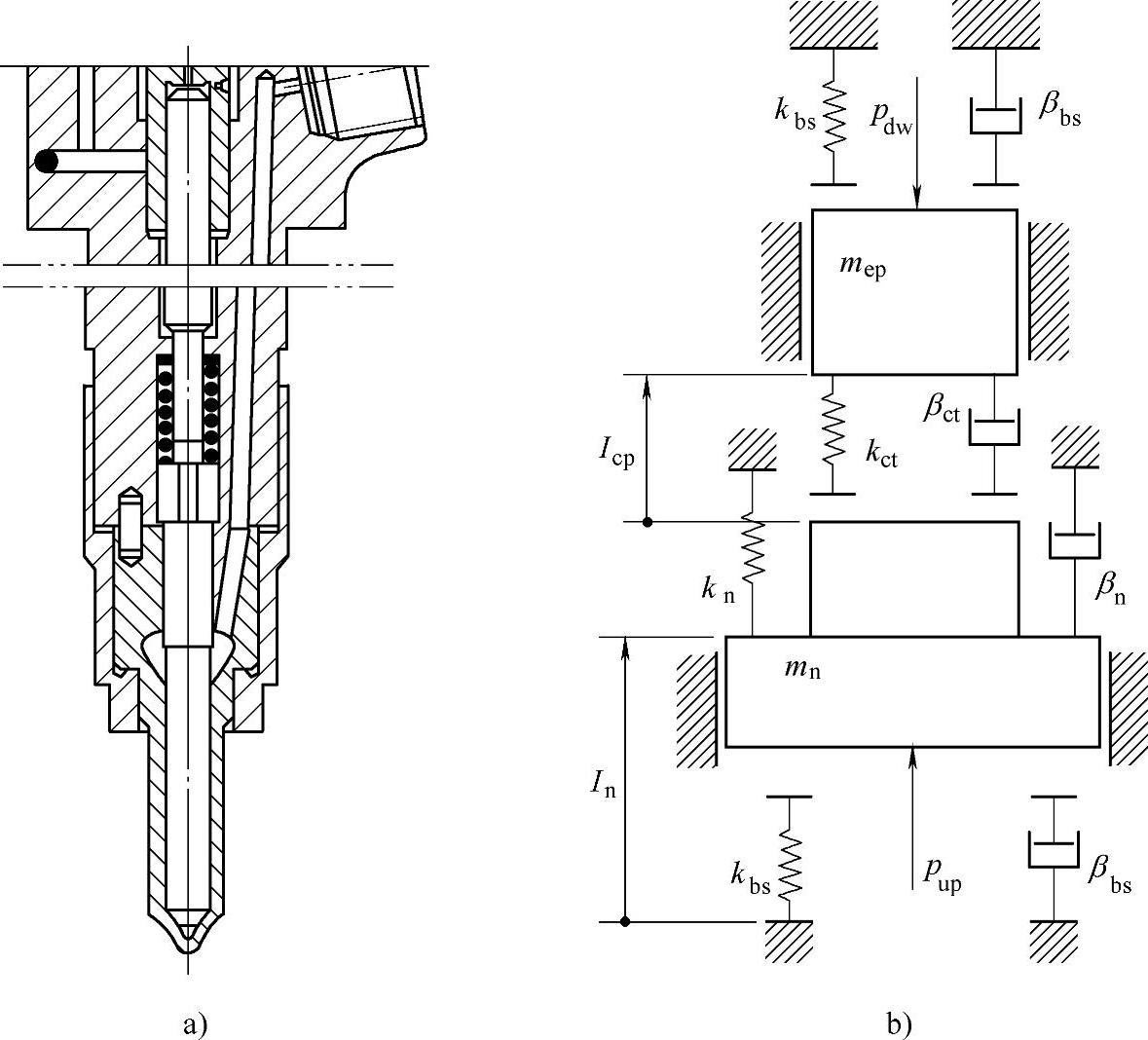
图9-12 控制柱塞和针阀运动组件的数学模型
a)控制柱塞和针阀运动组件 b)仿真数学模型
kct,βct——当控制柱塞和针阀互相接触时相互之间的作用力,用一个弹簧刚度为Kct的弹簧力和阻尼系数为βct的阻尼力来表示;
mn,mcp——分别是针阀和控制柱塞的质量;
ln,lcp——分别是针阀和控制柱塞的位移;
kn,βn——分别是针阀的复位弹簧刚度和针阀运动所受的粘性阻尼力的阻尼系数;
kbs,βbs——当针阀和针阀座互相接触时相互之间的作用力,或者当控制柱塞的上端面和控制柱塞套相接触时的相互作用力,用一个弹簧刚度为Kbs的弹簧力和阻尼系数为βbs的阻尼力来表示;
 ——在针阀开启、闭合的往复运动时,复位弹簧的名义预紧力;
——在针阀开启、闭合的往复运动时,复位弹簧的名义预紧力;
F0n——在针阀开启、闭合的往复运动时,复位弹簧的实际预紧力;
 ——描述控制柱塞和针阀互相接触时相互之间的弹簧力的预紧力,或者描述控制柱塞的上端面和控制柱塞套相接触时的弹簧力的预紧力;
——描述控制柱塞和针阀互相接触时相互之间的弹簧力的预紧力,或者描述控制柱塞的上端面和控制柱塞套相接触时的弹簧力的预紧力;
 ——考虑控制柱塞的实际位移的正负时,描述控制柱塞和针阀接触时相互之间的弹簧力的弹簧刚度,或者描述控制柱塞的上端面和控制柱塞套相接触时的弹簧力的弹簧刚度;
——考虑控制柱塞的实际位移的正负时,描述控制柱塞和针阀接触时相互之间的弹簧力的弹簧刚度,或者描述控制柱塞的上端面和控制柱塞套相接触时的弹簧力的弹簧刚度;
l——当控制柱塞和针阀的运动超过最大位移Lmax,控制柱塞的上端面和控制柱塞套接触时的作用力,用一个弹簧刚度为kbs的弹簧力描述时,相应的弹簧预压缩量;
ζ——阻尼比;
pk——控制柱塞和针阀运动组件上下两端面所受的燃油压力;
Sk——控制柱塞和针阀运动组件上下两端面燃油压力作用面积。(https://www.xing528.com)
2.高速电磁阀运动组件及机械运动的数学模型
如图9-13所示,实际高速电磁阀运动组件可以分为两个部件,一个是衔铁或者叫动铁心;一个是支撑衔铁的支撑杆,衔铁和支撑杆之间有相对运动,当电磁铁的静铁心通电产生电磁吸力使衔铁运动,同时带动衔铁和支撑杆一起运动。此时,可以将这两个部件作为一个整体考虑,但是当支撑杆的运动受到支撑杆的导向套的下端面的限制时,衔铁有继续向上运动的倾向,此时即产生了相对运动。另外,当电磁铁断电,支撑杆上端受到电磁阀的复位弹簧的作用向下运动,推动钢球关闭喷油器控制腔的出油阻尼孔。当钢球落座,支撑杆停止运动,但是衔铁会继续向下运动,衔铁的这种运动最后被衔铁下方的辅助弹簧阻止,这时衔铁和支撑杆也产生了相对运动。因此,描述高速电磁阀运动组件的数学模型为高速电磁阀运动组件整体运动方程和衔铁运动方程,它们是2个自由度的弹簧—质量—阻尼振动系统,描述该系统的微分方程分别为
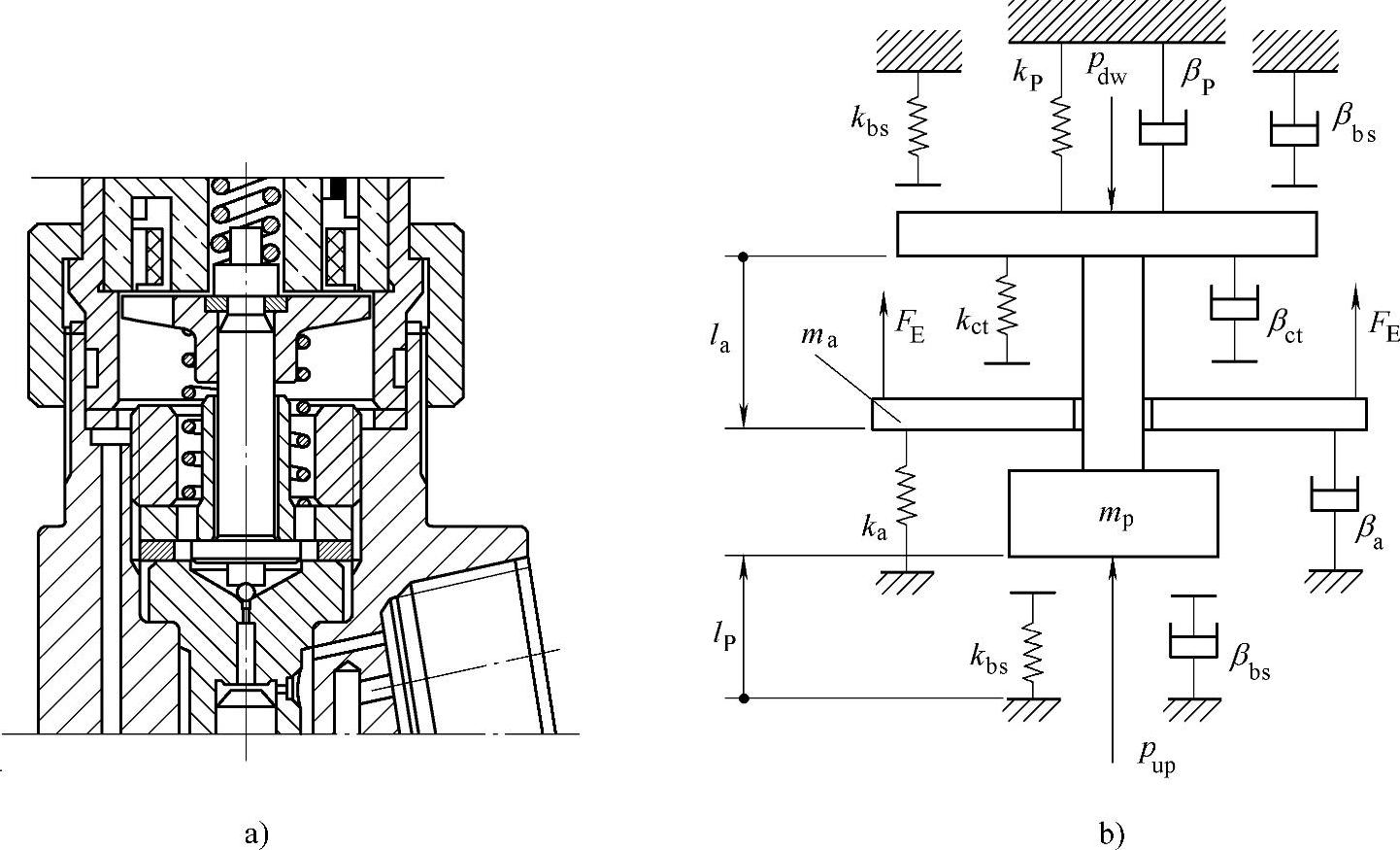
图9-13 高速电磁阀运动组件及机械运动的数学模型
a)高速电磁阀运动组件 b)高速电磁阀机械运动的数学模型
la<0, ,
, ,
,
la≥0, ,
, ,
,
lp<0, ,
, ,
,
lp<lpmax, ,
, ,
,
lp≥lpmax, ,
, ,
,

式中 lp——支撑杆的升程(位移);
lpmax——支撑杆的最大升程(位移);
la——衔铁的相对于支撑杆的位移;
ma——衔铁(动铁心)的质量;
mp——支撑杆的质量;
kp,βp——分别是支撑杆的复位弹簧刚度和支撑杆运动所受粘性阻尼力的阻尼系数;
ka,βa——分别是衔铁(动铁心)的辅助弹簧刚度和衔铁运动所受粘性阻尼力的阻尼系数;
kct,βct——当衔铁(动铁心)和支撑杆轴向互相接触时(实际通过卡圈接触),相互之间的作用力,用一个弹簧刚度为Kct的弹簧力和阻尼系数为βct的粘性阻尼力来表示;
kbs,βbs——当支撑杆的法兰端面和支撑杆导向套下端面轴向互相接触时相互之间的作用力,或者当支撑杆的下端面通过钢球和控制柱塞套的钢球座相接触时的相互作用力,用一个弹簧刚度为Kbs的弹簧力和阻尼系数为βbs的粘性阻尼力来表示;
 ——支撑杆的复位弹簧的预紧力;
——支撑杆的复位弹簧的预紧力;
 ——衔铁(动铁心)的辅助弹簧的预紧力;
——衔铁(动铁心)的辅助弹簧的预紧力;
ζ——阻尼比;
pk——支撑杆上下两端面所受的燃油压力;
Sk——支撑杆上下两端面燃油压力作用面积;
FE——电磁吸力。
这个高速电磁阀运动组件的机械运动的数学模型考虑了衔铁(动铁心)和支撑杆轴向互相接触时(实际通过卡圈接触)的相互之间作用力,也考虑了支撑杆的法兰端面和支撑杆导向套下端面轴向互相接触时相互之间作用力,以及支撑杆的下端面通过钢球和控制柱塞套的钢球座相接触时的相互作用力,因此模型是比较精确的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。