



【摘要】:梭子襻:在袖开衩处做假扣眼,线迹一环扣一环,呈链状,如图3-15所示。与变频调速方式相比较,在重载下降时,两种调速方法的工作点都在第4象限,但电动机的工作状态是不同的。
这里的原电力拖动系统专指绕线转子异步电动机电力拖动系统。
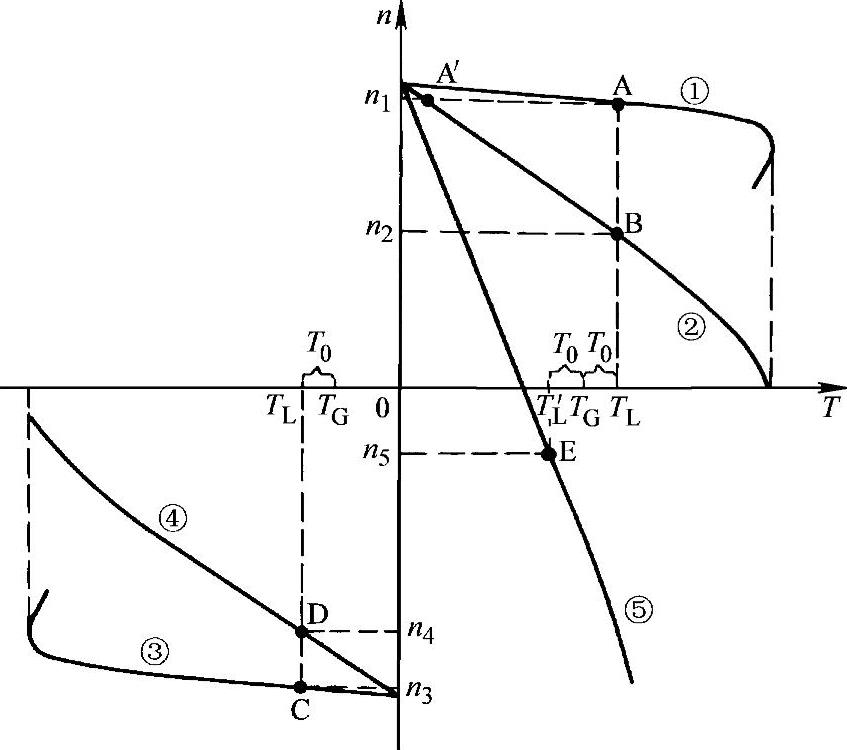
1.重物上升 机械特性也在第1象限,如图9-7中的曲线①所示,转速为n1。降速是通过转子回路中串入电阻来实现的。这时,机械特性为曲线②,工作点由A点跳变至A′点,电动机的转矩大为减小,电力拖动系统因带不动负载而减速,直至到达B点时,电动机的转矩重新和负载转矩平衡,工作点转移至B点,转速降为n2。
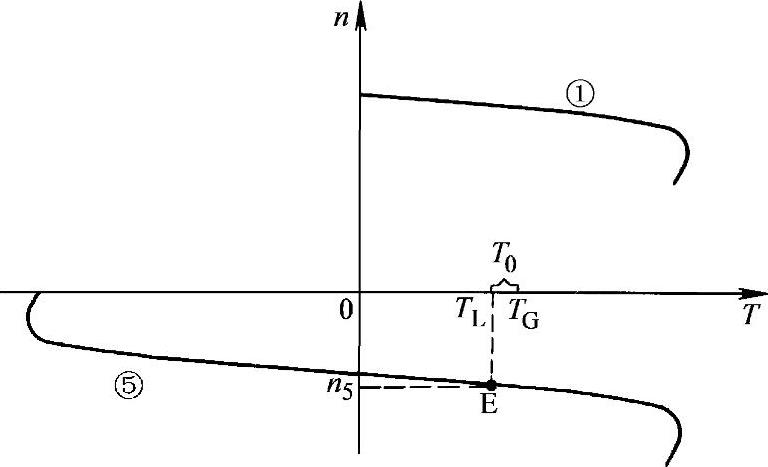
图9-6 重载下降时的工作点
 (https://www.xing528.com)
(https://www.xing528.com)
图9-7 绕线转子异步电动机的机械特性
2.轻载下降 其工作特点与重物上升时相同,只是转矩和转速都是负的,机械特性在第3象限,如图9-7中的曲线③和曲线④所示。
3.重载下降 重载下降时,电动机从接法上说,是正方向的,产生的转矩也是正的。但由于在转子回路中串入了大量电阻,使机械特性倾斜至如曲线⑤所示。这时,电动机产生的正转矩比重力产生的转矩小,非但不能带动重物上升,反而由于重物的拖动,电动机的实际旋转方向是负的,其工作点在机械特性向第4象限的延伸线上,如图中的E点所示。这时,转速为n5。这种工作状态的特点是:电动机的转矩是正的,却被重物“倒拉”着反转了,这称为倒拉式反接制动状态。
与变频调速方式相比较,在重载下降时,两种调速方法的工作点都在第4象限,但电动机的工作状态是不同的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。