



1.问题的提出 上述工作过程存在着一个矛盾:一方面,要求储气罐的实际压力(其大小与XF成正比)应无限接近于目标压力(其大小与XT成正比),就是说,要求(XT-XF)→0;另一方面,变频器的输出频率fX又是由XT和XF相减的结果来决定的。可以想像,如果把(XT-XF)直接作为给定信号XG的话,系统将是无法工作的。
2.比例(P)环节 解决上述矛盾的方法是将(XT-XF)进行放大后再作为频率给定信号,即
XG=KP(XT-XF)式中KP———比例增益(即放大倍数)。
上述关系如图7-18所示。由于XG是(XT-XF)成正比地放大的结果,故称此环节为比例环节。显然,KP越大,则

越小,XF越接近于XT,如图7-20a所示。
这里,XF只能是无限接近于XT,却不能等于XT。就是说,XF和XT之间总会有一个差值,通常称为静差,用ε表示。静差值应该越小越好。
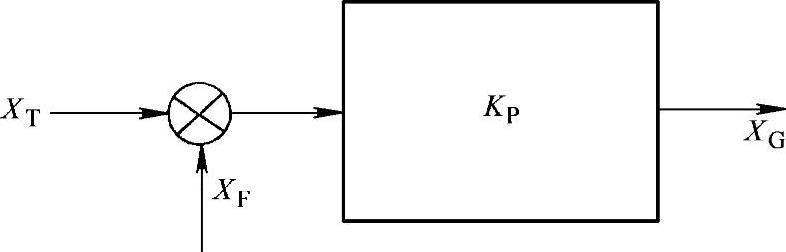
图7-18 比例放大前后各量间的关系
显然,比例增益KP越大,静差ε越小。在专用的PID调节器中,比例增益的大小常常是通过“比例带”来进行调节的。所谓比例带,就是按比例放大的区域,用P表示(等于KP的倒数),如图7-19所示。
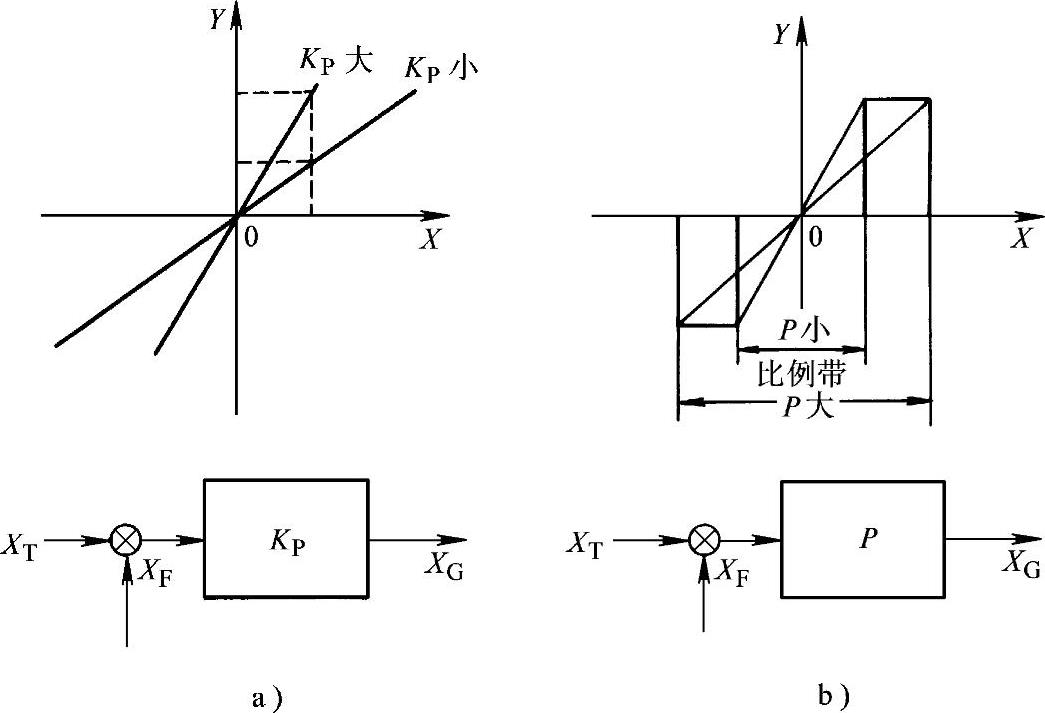
图7-19 比例增益与比例带
a)输出与输入的比例关系 b)比例带的概念
由图7-19可知,比例带P越小,相当于比例增益KP越大。但在几乎所有变频器内置的PID调节功能中,都是直接预置比例增益KP的。
比例增益环节的引入,又出现了新的矛盾:为了减小静差,应尽量增大比例增益,但由于系统有惯性,因此KP太大了,又容易引起被控量(压力)忽大忽小,形成振荡,如图7-20b所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图7-20 P、I、D的综合作用示意图
a)P调节 b)振荡现象 c)PI调节d)PID调节
3.积分(I)环节 引入积分环节的目的是:
(1)使给定信号XG的变化与乘积KP(XT-XF)对时间的积分成正比。意思是说,尽管KP(XT-XF)一下子增大(或减小)了许多,但XG只能在“积分时间”内逐渐地增大(或减小),从而减缓了XG的变化速度,防止了振荡。积分时间越长,XG的变化越慢。
(2)只要偏差不消除(XT-XF≠0),积分就不停止,从而能有效地消除静差,如图7-20c所示。
但积分时间太长,又会发生在被控量(空气压缩机的压力)急剧变化时,被控量(压力)难以迅速恢复的情况。
4.微分(D)环节 微分环节的作用是:可根据偏差的变化趋势,提前给出较大的调节动作,从而缩短调节时间,克服了因积分时间太长而使恢复滞后的缺点,如图7-20d所示。
5.变频器中PID调节功能的预置
(1)预置PID功能 预置的内容是:变频器的PID功能是否有效。这是十分重要的,因为变频器的PID调节功能有效后,其升、降速过程将完全取决于由P、I、D数据所决定的动态响应过程,而原来预置的“升速时间”和“降速时间”将不再起作用。
(2)目标值的预置PID调节的根本依据是反馈量与目标值之间进行比较的结果。因此,准确地预置目标值是十分重要的。主要有以下两种方法:
1)面板输入式。只需通过键盘输入目标值即可。目标值的确定方法通常是:目标压力与传感器量程之比的百分数。例如,空气压缩机要求的压力(目标压力)为6MPa,所用压力表的量程是0~10MPa,则目标值为60%(0.6)。
2)外接给定式。由外接电位器进行预置,调整起来比较方便。
当变频器按P、I、D调节规律运行时,有两个特点需要注意:
(1)变频器的输出频率fX只根据储气罐的实际压力(XF)与目标压力(XT)比较的结果进行调整,所以,频率的大小与被控量(压力)之间并无对应关系。
(2)变频器的输出频率fX始终处于调整状态,因此其数值常不稳定。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。