



【摘要】:图11.1.13 修改零部件线型图1-34 直流制动原理1.状态特征 电动机的实际旋转方向与旋转磁场的旋转方向相反时的状态即为反接制动状态。这种反接制动状态在用作快速制动的方法时,具有不易操作、比较危险等缺点,故变频调速系统中基本不用。图1-37 倒拉式反接制动特性①—原机械特性 ②—反接制动时的机械特性
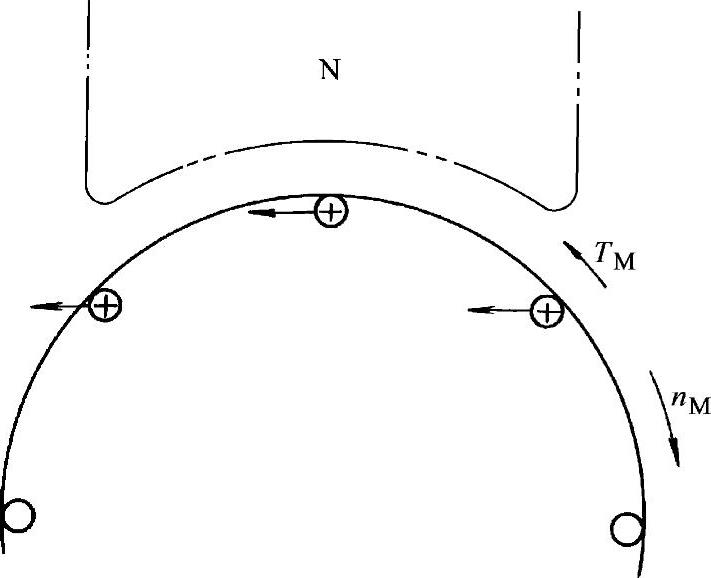
图1-34 直流制动原理
1.状态特征 电动机的实际旋转方向与旋转磁场的旋转方向相反时的状态即为反接制动状态。
简言之,即nM与n0方向相反是反接制动状态的基本特征。
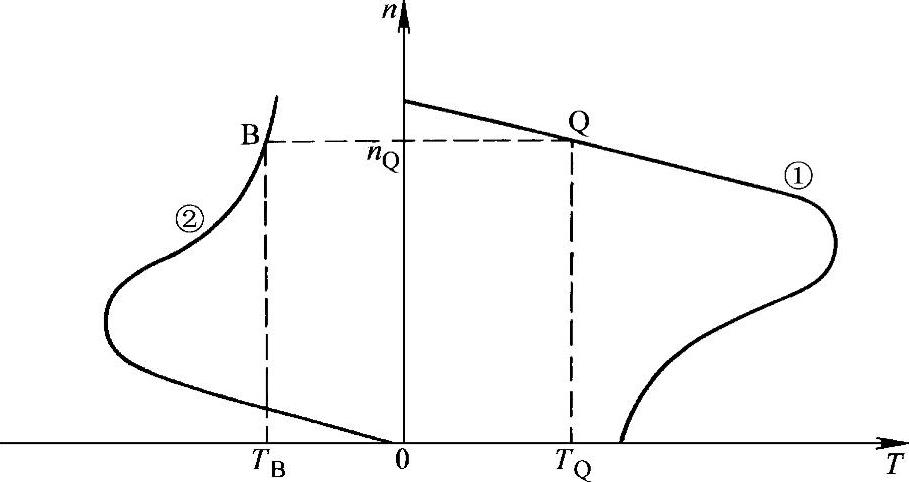
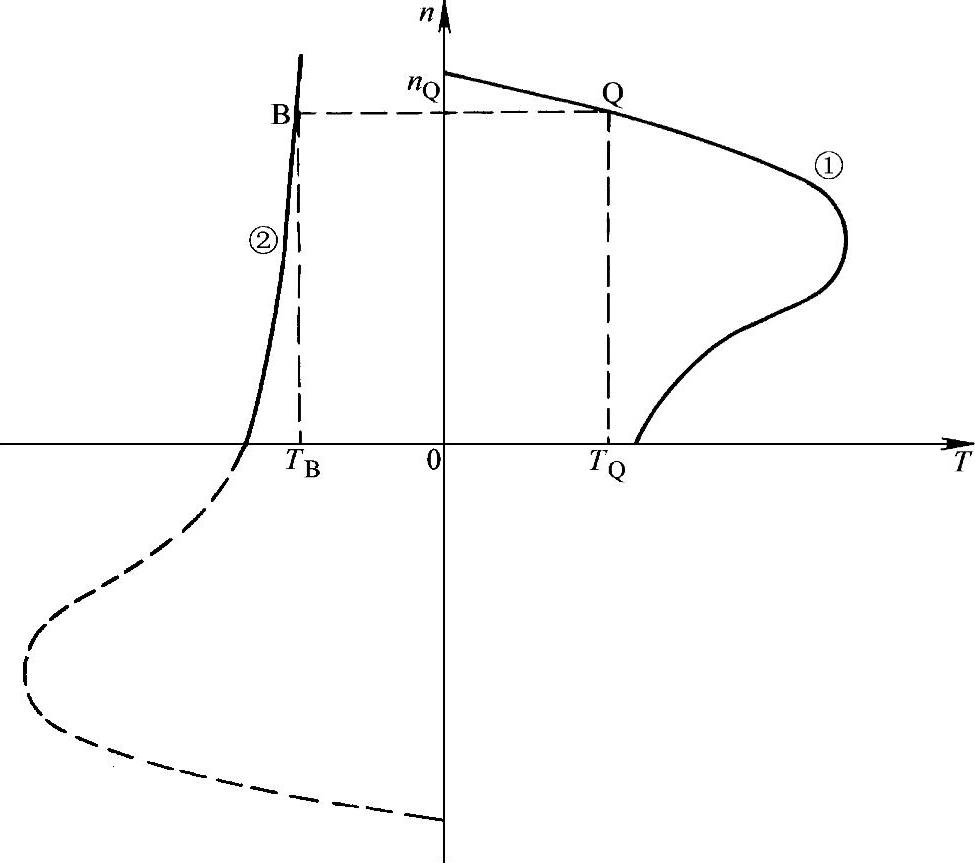
图1-35 直流制动的机械特性
①—原机械特性 ②—直流制动时的机械特性
2.磁场反转的反接制动 众所周知,改变电动机电源进线的相序(交换任意两相进线),可使旋转磁场的旋转方向相反,并最终导致电动机反转。由于反转时电磁转矩和转速都是负的,故其机械特性在第三象限,如图1-36中曲线②所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图1-36 磁场反转的反接制动特性
①—原机械特性 ②—反接制动时的机械特性
设电动机正转时工作点为曲线①上的Q点(TQ、nQ),则在刚反接的瞬间,其工作点将从Q点跳转到曲线②的B点(在第二象限)。然后,转速迅速下降为0,并开始反转。这里,从B点下降到nM=0的那一段(即第二象限中的那一段),电磁转矩TM是负的,而转速nM是正的,电动机处于反接制动状态,开始反转后又成为电动状态。这种反接制动状态在用作快速制动的方法时,具有不易操作、比较危险等缺点,故变频调速系统中基本不用。
3.倒拉式反接制动 起重机在缓慢下放重物时,有时采用这样的方法:电动机的电磁转矩力图使重物上升,但因“带不动”,结果转子的实际旋转方向被重物倒拉成反转了。其机械特性如图1-37中曲线②所示的向第四象限延伸的部分,这时的工作点为Q′点。电磁转矩TM是正的,而转速nQ′却是负的。
一般来说,笼型异步电动机是不使用那种状态的。
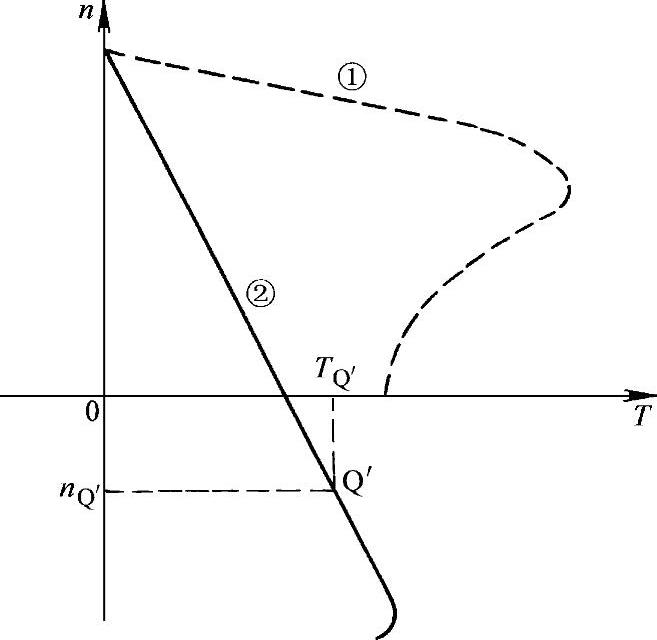
图1-37 倒拉式反接制动特性
①—原机械特性 ②—反接制动时的机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。