



【摘要】:所以,动态运行是电力拖动系统从一种平衡状态过渡到另一种平衡状态的中间过程。常见的瞬态过程有起动过程、制动过程、调速过程、负载发生变化后的重新平衡过程等。在瞬态过程中,加速度的大小,升、降速时间的长短,除了和动态转矩TJ有关外,还和电力拖动系统的惯性有关。在工程计算中,电力拖动系统的惯性大小由飞轮力矩GD2来表示。
如果拖动系统的转矩之间不平衡,则TM>TL+T0时,n↑,系统加速;TM<TL+T0时,n↓,系统减速。
总之,系统的转速是不稳定的,处于动态运行的过程中。
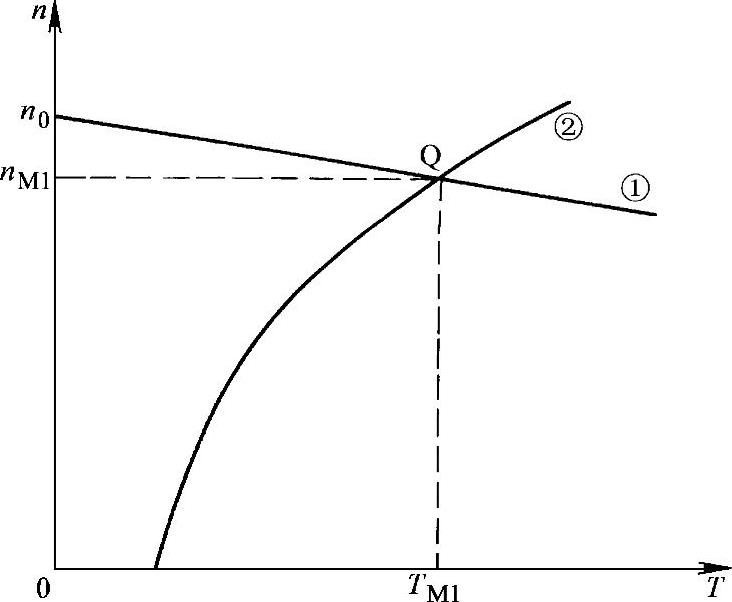
图1-3 电力拖动系统的稳态工作点
①—电动机的机械特性 ②—鼓风机的机械特性
随着电力拖动系统转速的改变,电动机的电磁转矩和负载的阻转矩也都跟着改变,直到它们重新相等。这时,系统在一个新的转速下达到了新的平衡。
所以,动态运行是电力拖动系统从一种平衡状态过渡到另一种平衡状态的中间过程。这个过程称为瞬态过程,或过渡过程。常见的瞬态过程有起动过程、制动过程、调速过程、负载发生变化后的重新平衡过程等。
在瞬态过程里,转矩间的差值称为动态转矩,用TJ表示,即
TJ=TM-TL (1-3)
动态转矩是电力拖动系统产生加速度(dn/dt)的原因:(https://www.xing528.com)
TJ>0→dn/dt>0→系统加速;
TJ<0→dn/dt<0→系统减速;
TJ=0→dn/dt=0→系统稳定运行。
在瞬态过程中,加速度的大小,升、降速时间的长短,除了和动态转矩TJ有关外,还和电力拖动系统的惯性有关。在工程计算中,电力拖动系统的惯性大小由飞轮力矩GD2来表示。dn/dt和TJ及GD2间的关系是

式(1-4)说明:
(1)在飞轮力矩不变时,动态转矩越大,加速度越大,而瞬态过程的时间越短。
(2)当动态转矩不变时,飞轮力矩(惯性)越大,加速度越小,而瞬态过程的时间越长。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。