



盾构刀盘实物如图5-146所示。
在城市地铁隧道施工中,由于受到施工场地、道路交通等城市环境因素的限制,传统的施工方法难以胜任,只能依赖对城市正常机能影响较小的隧道施工方法——盾构施工法。因此,盾构隧道施工及盾构机技术越来越受到关注。可以预见,盾构隧道施工及盾构掘进机产业在我国的发展前景非常广阔。
刀盘是盾构掘进机的重要组成部分,是进行掘进作业的主要工作机构。盾构刀盘驱动系统具有功率大、功率变化范围宽的特点。由于负载是随断面的土质状况变化的,切削硬岩和切削软土所需的切削力矩及转速的变化很大。如果采用阀控马达的系统形式,系统功率必然按所需的最大功率设计,在遇到欠负载工况时,系统效率低下,大量的功率将通过热的形式耗散,使系统发热严重。若采用变频电动机直接驱动刀盘系统,则设备费用高,控制技术复杂。而采用液压驱动的变排量泵控马达系统和变转速泵控马达系统,则可有效地解决这一问题,这也是盾构电液驱动的发展趋势。液压驱动具有传递功率大、控制精度高、安装空间小、能源消耗低等特点,并且适用于运动复杂、工作环境恶劣等情况。
本小节介绍两种具有节能效果的刀盘液压驱动系统,一种是采用变排量泵控马达的刀盘液压驱动系统,另一种是采用变转速泵控马达的刀盘驱动液压系统。

图5-146 盾构刀盘实物
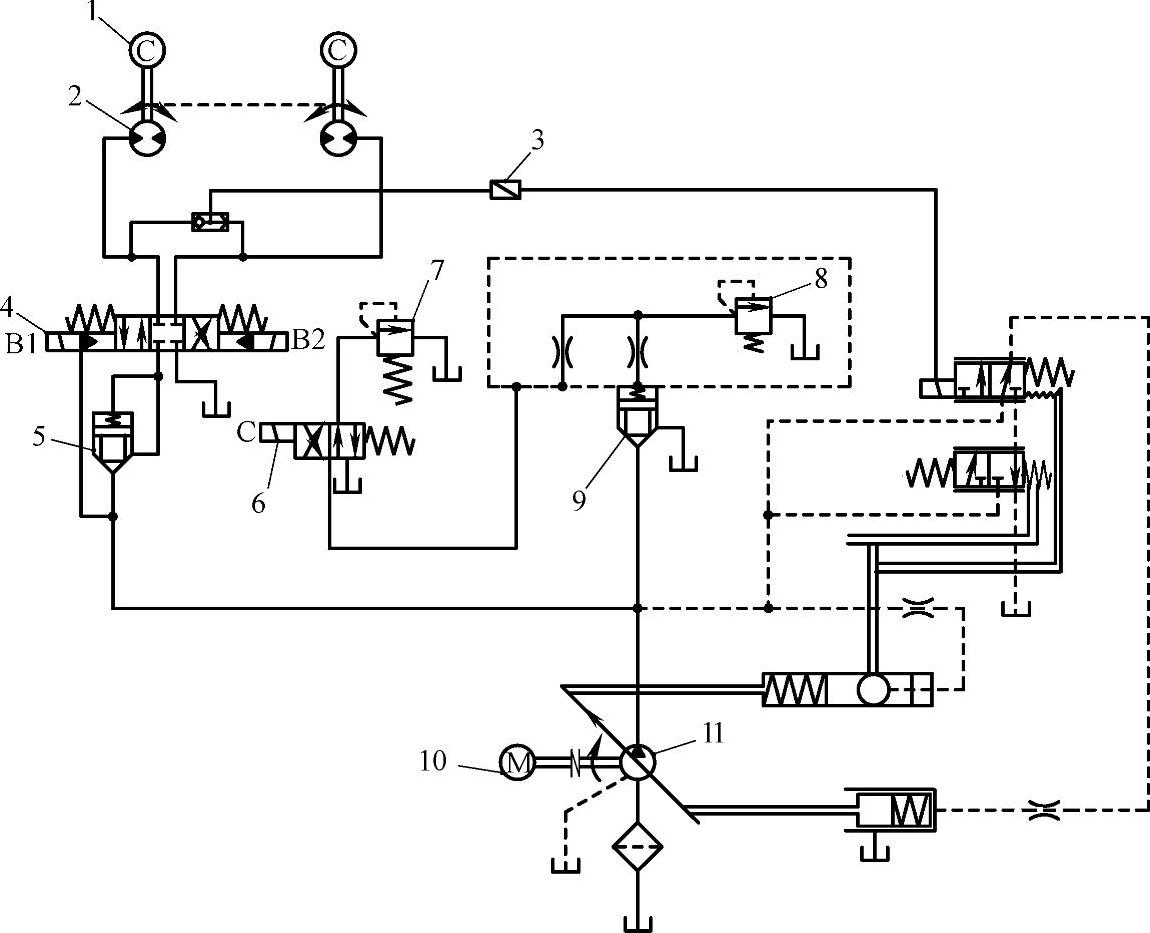
图5-147 采用变排量泵控马达的电比例功率自适应的刀盘液压驱动系统
1—减速器 2—马达 3—压力传感器 4—三位四通电磁换向阀 5—单向阀 6—二位四通电磁换向阀 7—低压溢流阀 8—高压溢流阀 9—插装阀 10—电动机 11—变量泵
1.变排量泵控马达刀盘液压驱动系统(https://www.xing528.com)
本系统主要由液压泵站、阀块组、管路、驱动液压马达、减速器、大小齿轮、主轴承及密封件等组成。液压马达驱动刀盘旋转,刀盘转速及力矩通过液压系统供油压力和流量调节,该系统具有体积小、便于刀盘调速及过载保护等特点。图5-147所示为采用变排量泵控马达的电比例功率自适应的刀盘液压驱动系统。液压系统中采用接近开关实时检测刀盘的转速,根据合适的策略控制变量缸位移,继而控制变量泵排量,形成按负载工况变化需要进行连续实时可控的刀盘驱动液压控制系统。由于采用了功率自适应的比例反馈液压控制技术,即系统输出功率始终与负载所需功率相适应,能够使刀盘驱动液压控制系统适应掘进中的复杂工况,系统节能效果好。
本系统采用变量泵和定量马达组成开式控制回路驱动刀盘转动。掘进过程中刀盘转速是实时连续可调的,可通过调节变量泵11排量实现转速调节。压力传感器3的信号可实时反馈到主泵比例阀上。整个系统可实现两种工况,即软岩工况时的低速、大转矩和硬岩工况时的高速、小转矩,两种工况转换可通过控制电磁换向阀6来实现。当电磁铁C失电时,溢流阀7确定系统压力,此时,系统压力为10MPa,输出转矩小,但流量大,输出转速高;当电磁铁C得电时,溢流阀8确定系统压力,此时,系统压力为20MPa,输出转矩大,但流量小,输出转速低。马达2的正反转可通过电磁换向阀4来控制,电磁铁B1得电,马达正转,电磁铁B2得电,马达反转。
2.变转速泵控马达刀盘液压驱动系统
本系统主要由变频器、工控机、定量泵、阀块组、管路、驱动液压马达、减速器、大小齿轮、主轴承及密封件等组成。改变变量泵的排量或改变电动机转速均可改变泵的输出流量,以达到改变执行元件速度的目的。电比例功率自适应的刀盘驱动液压系统回路是靠改变变量泵排量来调节执行元件的运动速度的。变转速泵控马达系统是一种通过改变电动机的转速来改变泵输出流量而达到调速的方式,它与改变变量泵排量方式不同,是通过交流变频调速实现执行元件的调速。在这种调速方式中,液压泵可以选用价格低廉、可靠性高的定量泵。
在图5-147所示系统的基础上,将变量泵用定量泵+普通电动机+变频器替代,成为采用变转速泵控马达的盾构刀盘液压驱动系统,如图5-148所示。

图5-148 采用变转速泵控马达的盾构刀盘液压驱动系统
1—减速机 2—马达 3—压力传感器 4—三位四通电磁换向阀 5—单向阀 6—二位四通电磁换向阀 7—低压溢流阀 8—高压溢流阀 9—插装阀 10—定量泵
三相电源接入变频器的输入侧,经过变频器的控制信号,变频器将380V、50Hz的工频电源变换成特定频率特定电压的正弦电压信号供给异步电动机,电动机带动液压泵旋转。系统中传感器包括泵的出口压力传感器、马达进口压力传感器和刀盘转速传感器。各传感器的电信号经调理与隔离电路后进A-D转换器,然后通过工控机对这些信号进行采集和处理。工控机输出的信号经D-A转换器变为模拟信号,再经过信号调理与隔离电路后输出,作为变频器的控制电压,控制电动机转速,改变定量泵的输出流量,从而控制马达的转速。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。