



天工-利勃海尔L551B型装载机实物如图5-47所示。

图5-47 天工-利勃海尔L551B型装载机实物
L551B型装载机是从德国利勃海尔公司引进的具有世界先进水平的装载机。其斗容量为4m3,额定载重量为7t。大型装载机作业液压系统的设计直接影响整机性能,一般来说,用户要求作业液压系统操纵简单轻便,动作灵敏准确,使用安全可靠,自动化程度高,容易维护保养,低能耗以利于环保和降低作业费用等。日前,国际上大型装载机的设计都充分考虑了以上特点。下面以L551B装载机为例,对此做简要分析。图5-48所示是其作业液压系统原理。
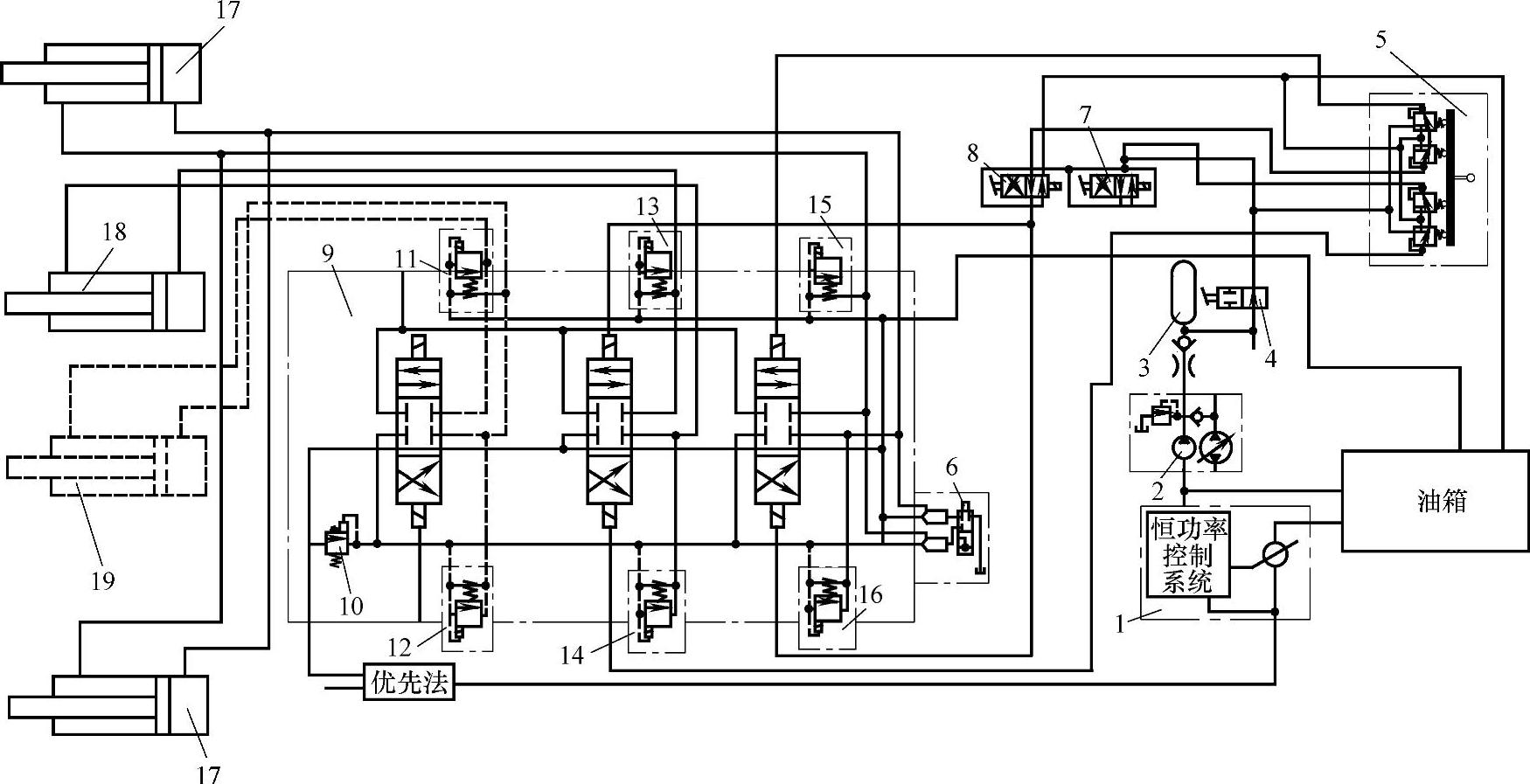
图5-48 装载机作业液压系统原理
1—作业/转向泵 2—辅助泵 3—蓄能器 4—截止阀 5—减压式液控先导阀 6—悬浮位电磁阀 7—铲斗自动放平电磁阀 8—动臂举升限位电磁阀 9—多路阀 10—主安全阀 11~16—双作用安全阀 17—动臂缸 18—翻斗缸 19—附加缸
该系统主要由作业/转向泵1、多路阀9、辅助泵2、减压式液控先导阀5、电磁阀6~8、动臂缸17、翻斗缸18等组成。由于采用了分片式多路阀,可按需要增加阀片和附加缸及相应的附件。
本系统采用恒流量与恒功率组合调节变量,柱塞泵(图5-48中的元件1)为系统动力源。该泵的工作曲线如图5-49所示。
当装载机在额定负载内的举升和下降作业工况时,泵处于恒流工作区,即图5-49中的ab段,此时泵具有最大并基本恒定的流量和较低的工作压力(16MPa以下),使装载机在满足举升力和倾翻力条件下具有很快的作业速度。当装载机进行挖掘装载工况时需要泵提供较高的压力(16~27MPa)和适当的作业速度。此时泵转入恒功率工作区,即图5-49中的bc段,泵输出功率基本恒定,但工作压力大幅上升,流量显著下降,较好地适应装载机挖掘装载等高负载工况的需求。当系统压力接近27MPa时,泵的输出流量基本为零,不会产生大流量的溢流,从而避免了能量损失和系统发热。
系统多路阀为分片式三位六通换向阀,共两片。这一点是与众不同的。为了实现动臂的悬浮功能,系统内设置了悬浮位电磁阀(图5-48中元件6),通过相应的电控开关来实现悬浮。这种设计的原因将在下文提到。
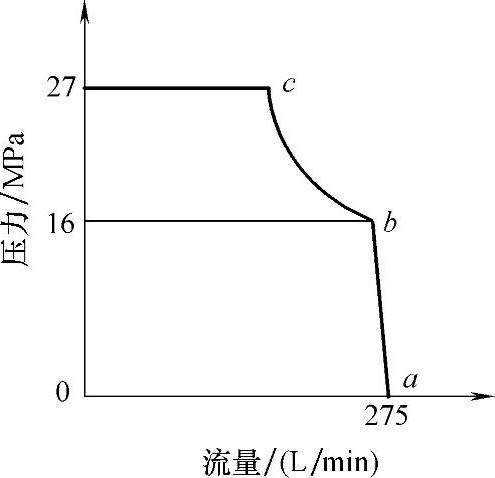
图5-49 作业/转向泵的工作曲线(https://www.xing528.com)
a~b—恒流量工作区 b~c—恒功率工作区
作业液压系统多路阀的控制由先导控制回路完成。回路的工作压力为2.6MPa。辅助泵(图5-48中元件2)的控制油通过四个减压式液控先导阀(图5-48中元件5)分别控制两片多路阀,实现动臂举升、下降,铲斗外翻、收起四个动作。每个先导阀都有微动、半开、全开三个位置,可以精确控制作业装置的位置。
纵观L551B型装载机作业液压系统,其设计中非常注意系统的安全性、操纵性,并利用电-液技术相结合使系统功能得到增强。
在安全性方面,系统在先导控制回路中设置了蓄能器(图5-48中元件3)和截止阀(图5-48中元件4)。这样,在发动机突然熄火、辅助泵停止供油时,可以利用蓄能器中的液压油,使作业装置依靠重力回复到安全位置。当装载机处于行驶状态时,可以关闭截止阀,使整个先导控制回路被锁死,防止误操作。此外,系统特别为控制悬浮功能的电磁阀(图5-48中元件6)设计了一套安全性很高的电子回路:位于仪表盘上一左一右的A1、A2两个方键开关控制悬浮功能。只有先按下A1开关并在4s内启动A2开关,悬浮功能才启动。这就从根本上杜绝了此功能的误操作,提高了整机的安全性。
操纵方便是1551B型装载机的另外一个显著特征。图5-50所示为一个多功能操纵杆。通过它的前后左右运动,推动四个减压式液控先导阀(见图5-51),可以控制动臂缸及翻斗缸的动作。按钮4可以实现铲斗自动放平,按钮3为前进-后退挡位选择开关,旋转按钮1可以进行挡位选择(空挡、1挡、2挡、自动挡)。所以说,当右手握住这根操纵杆时,只需动一动手指头,即可实现诸多控制功能。而且,精心设计的手柄外形完全符合人机工程学,即使长时间操作也不会感到疲劳。由于转向系统采用了流量放大阀等技术,因此方向盘上的转动力矩很小,完全可用一只左手胜任。这些都极大地减轻了操作者的负担。
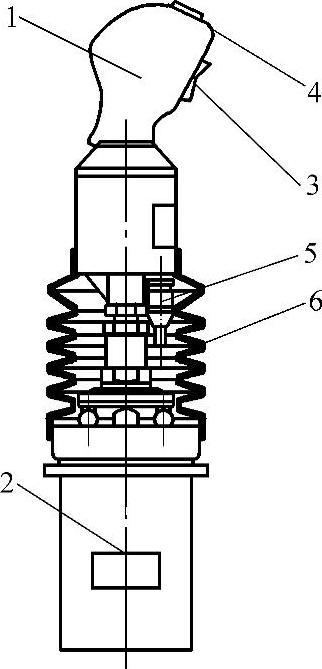
图5-50 多功能操纵杆
1—控制手柄(挡位选择) 2—减压式液控先导阀(四个) 3—前进-后退挡位选择开关 4—铲斗自动放平按钮 5—控制电缆 6—防尘护套
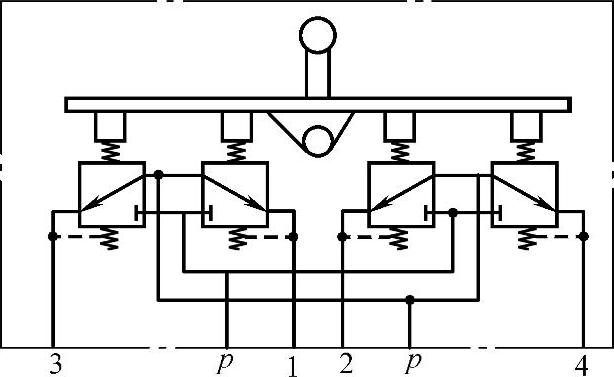
图5-51 减压式液控先导阀原理
该系统在先导控制回路中设置了两个电磁阀(图5-48中元件7、8),运用接近开关等电传感器控制它们,将电液技术结合在一起,实现了动臂举升高度限位、铲斗自动放平功能,进一步提高了整机的工作效率。特别是动臂举升高度限位功能,可以限制铲斗最大举升高度,非常适用于在高度有限的空间,如桥下、车间内、高压线下等场地施工,而且高度限位开关的调节非常方便。这就进一步减轻了驾驶员的负担,使驾驶员可以集中精力进行作业。当然,对提高作业时的安全性也是有好处的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。