



R914B型液压挖掘机是利勃海尔公司在R914型液压挖掘机的基础上推出的新产品,现已在利勃海尔独资的大连工厂批量生产。该机集高效率、可靠性、舒适性及经济性于一体。其核心元件均由利勃海尔在欧洲的工厂制造。发动机采用利勃海尔4缸直列式D924TI-EA2型柴油发动机,直喷、中冷、涡轮增压、废气排放均达到欧洲标准,额定功率为112kW,在-20℃环境温度下,可轻易起动;若选用冷起动装置,则可在-40℃以下工作;柴油发动机维护点全部布置在柴油发动机的一侧,便于维护操作。利勃海尔R系列履带挖掘机实验如图5-41所示。

图5-41 利勃海尔R系列履带挖掘机实物
1.LSC(负载感应)控制系统
(1)LR控制:液压泵-发动机的匹配 R914B型挖掘机主液压泵采用双联的利勃海尔LPVD轴向柱塞斜盘变量泵。针对不同作业工况分为不同的作业模式,从而在不同的模式下可以选择不同的油门开度和泵的排量,即分工况控制。利勃海尔R914B型挖掘机采用L(Lift)、F(Fine)、E(Economy)、P(Power)四种工作模式。通过模式选择开关来选择作业模式,不同的作业模式消耗的功率占发动机总功率的百分比为常数;具体到某一工作模式,每一种模式则对应着不同的发动机转速。通常在作业前由操作者根据具体作业环境选定一种模式,即得到发动机的目标转速n0,发动机的实际转速nr由装于飞轮壳体上的磁电式传感器B12检测后,经PID转换电路输入微控制器BST与目标值n0比较后,按一定的控制规律,计算、判断并输出控制信号给发动机油门控制步进电动机,使发动机转速达到目标值n0。这样就能够在不同的作业情况下,选择不同的功率输出,不至于有多余的功率损耗。此外,在左右操纵手柄及行走踏板上设有四个自动低怠速传感器,即在发动机运转但挖掘机不需工作的情况下,发动机转速降为低怠速,发动机输出最小功率时液压泵输出最小流量,同样达到节能降耗的目的。发动机转速感应控制方框图如图5-42所示。
具体到某一工作模式,微控制器BST同时还输出相应的控制电流ILR给电液比例减压阀Y50,该阀输出的控制液压油pLR经GLR口分别进入5、6两个LR功率匹配阀,并通过伺服液压缸3、4来改变泵的排量,如图5-43所示。不同的模式对应不同的电流ILR,从而对应不同的减压阀出口压力pLR,也就对应着泵的不同排量,使泵的吸收功率与发动机的输出功率达到合理匹配,从而充分利用了发动机功率,提高了作业效率。如P模式下,发动机转速最高,Y50的ILR电流最大,从而压力pLR也最大,此时功率匹配阀5、6接通,高压油进入伺服液压缸无杆腔,斜盘倾角变大,液压泵输出最大流量。而在低怠速或F模式下,Y50的ILR较小,pLR也较小,此时伺服液压缸3、4的无杆腔油压接通油箱,斜盘倾角变小,液压泵输出较小的流量,达到节能目的。
在上述设计理念的基础上,整个双联液压泵的功率控制与传统的恒功率控制相比,扩大了控制范围,避免了挖掘机总在最大功率、最大流量、最大压力三种极端工况下工作,改善了液压泵和发动机的运行状况,使得在不同的作业工况下均能做到液压泵-发动机很好地匹配,达到经济性、可靠性和高效率的统一。

图5-42 发动机转速感应控制方框图
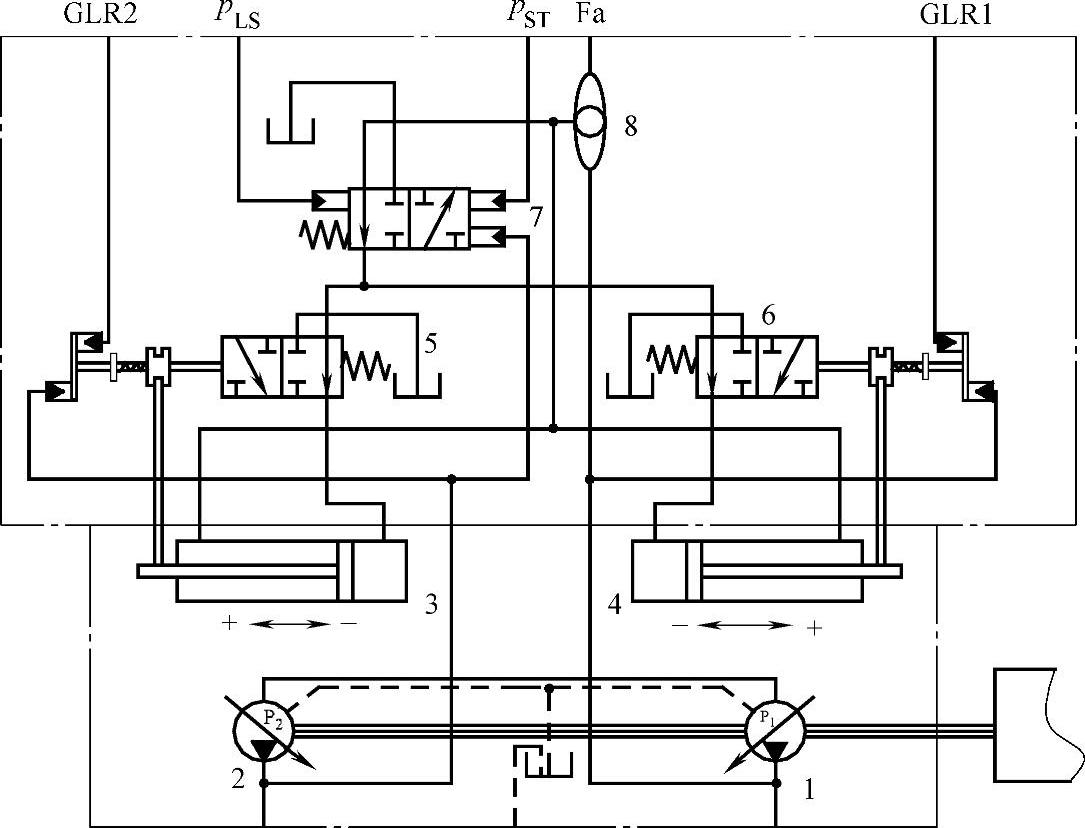
图5-43 液压泵-发动机的LR控制示意图
1、2—双联轴向柱塞变量泵 3、4—伺服液压缸 5、6—LR功率匹配阀 7—LR控制阀 8—梭阀
(2)LS控制:双联泵-负载的匹配 R914B型挖掘机双联泵-负载匹配的基本工作原理:由负荷传感液压泵供油,通过操作者可控的可变节流口和压力补偿阀(两者集成于Linde- VW25/18同步控制阀中)到最终动作。由于压力补偿的作用,使得可变节流口两端压差Δp=p1-p2=常数,故控制各动作的节流口过流面积一经调定,各动作间的流量关系便不再受外界干扰而保持不变,从而保证各动作精确地同步。再者,当各动作不同时工作而泵供油量过大以及由于外界干扰产生压力或流量变化时,系统能立即捕捉其变化,通过负荷传感回路及时地调节泵的排量,使得整个系统始终处于最佳工作状态,减少能量损失。此系统的另一特点是,当操作者的要求超出液压泵供油流量能力,或者当功率调节装置限制泵的供油流量时,主泵限压阀4用来限制主液压泵的最高压力,保护液压系统免受压力冲击而引起液压元件的损坏。LS负载压力限压阀13用来限制最高负载压力,决定系统的最高工作压力。如果最高负载压力达到此阀的设定压力时,实时实现LS负载压力的切断,该执行元件保持高压、低流量,而其他元件继续正常工作,如图5-44所示。
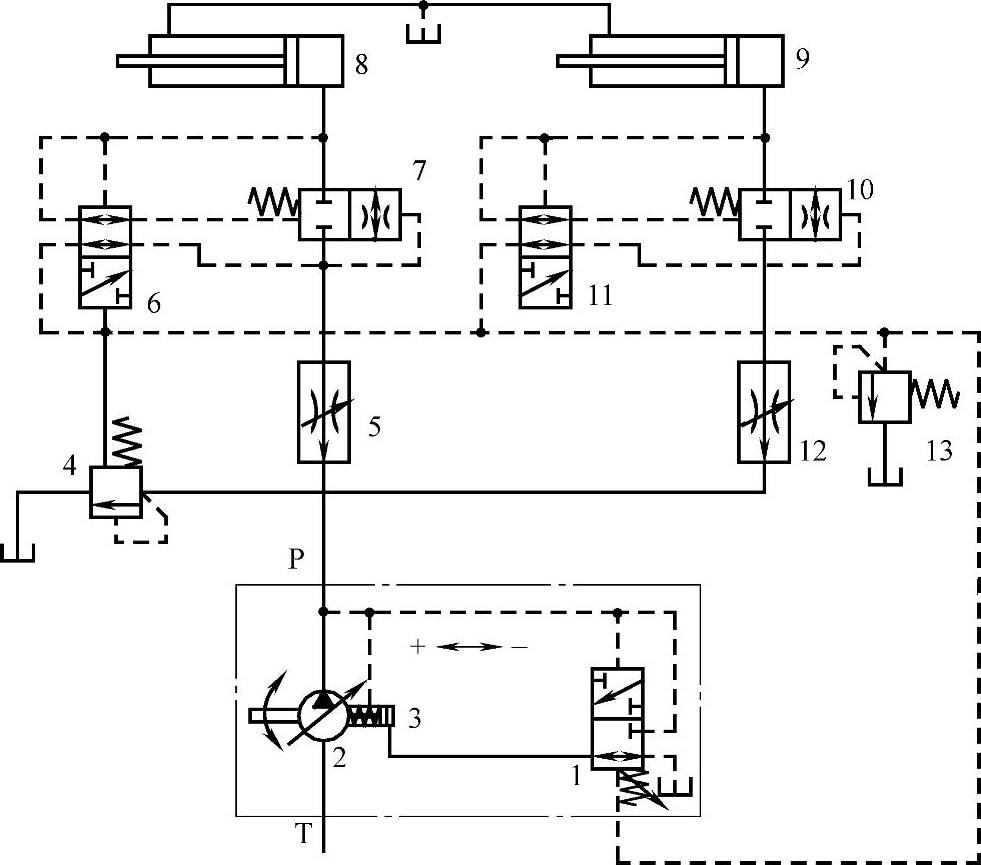
图5-44 液压泵-多路阀的LS控制示意图
1—LS控制阀 2—轴向柱塞变量泵 3—伺服柱塞 4—主泵限压阀 5、12—多路阀 6、11—切换阀 7、10—压力补偿阀 8、9—液压缸 13—LS负载压力限压阀
正常工作时(即系统不饱和时),Δp为设定值3.2MPa。此时由于Δp为常量,根据节流孔流量关系公式 ,各执行元件的流量仅取决于多路阀开口面积A的大小(即与负载压力无关的流量分配)。当多个执行元件同时进行复合动作时,液压系统通常会出现流量饱和。此时液压泵的供油量qp不能满足多个执行元件的需要,Δp相应减少,所有受控动作速度受到限制,但由于压力补偿阀7、10的作用,各个节流孔的Δp大小仍然相等,此刻各动作间的速度比例关系仍保持原调定值不变,各执行元件的流量仍然仅取决于多路阀开口面积A的大小(即与负载压力无关的流量分配)。(https://www.xing528.com)
,各执行元件的流量仅取决于多路阀开口面积A的大小(即与负载压力无关的流量分配)。当多个执行元件同时进行复合动作时,液压系统通常会出现流量饱和。此时液压泵的供油量qp不能满足多个执行元件的需要,Δp相应减少,所有受控动作速度受到限制,但由于压力补偿阀7、10的作用,各个节流孔的Δp大小仍然相等,此刻各动作间的速度比例关系仍保持原调定值不变,各执行元件的流量仍然仅取决于多路阀开口面积A的大小(即与负载压力无关的流量分配)。(https://www.xing528.com)
2.回转系统
与利勃海尔大中型挖掘机配备有独立的回转泵和采用闭式回路不同,R914B挖掘机的回转系统为一开式回路,集成有回转换向阀的回转马达为一定量马达。回转液压系统如图5-45所示。
LS回路中回转限压阀3是一先导式限压阀,通常其最大设定压力值低于回转马达的次级溢流阀的压力设定值,但其压力值是动态的,由先导压力加载进行控制,故可以实现回转动作的转矩控制。如果驾驶员操纵先导操纵手柄的偏转位移大,先导压力就高,此时回转系统的回转限压阀3压力就上升,回转转矩则增大,反之亦然,从而实现驾驶员对回转的转矩控制,即决定回转的加速度。同时由于回转转矩控制阀在LS回路上,其负载压力值也反馈到LS压力补偿阀,因此回转机构只需提供马达建立压力所需的流量,从而实现完全无损失的加速过程,达到节能的目的。
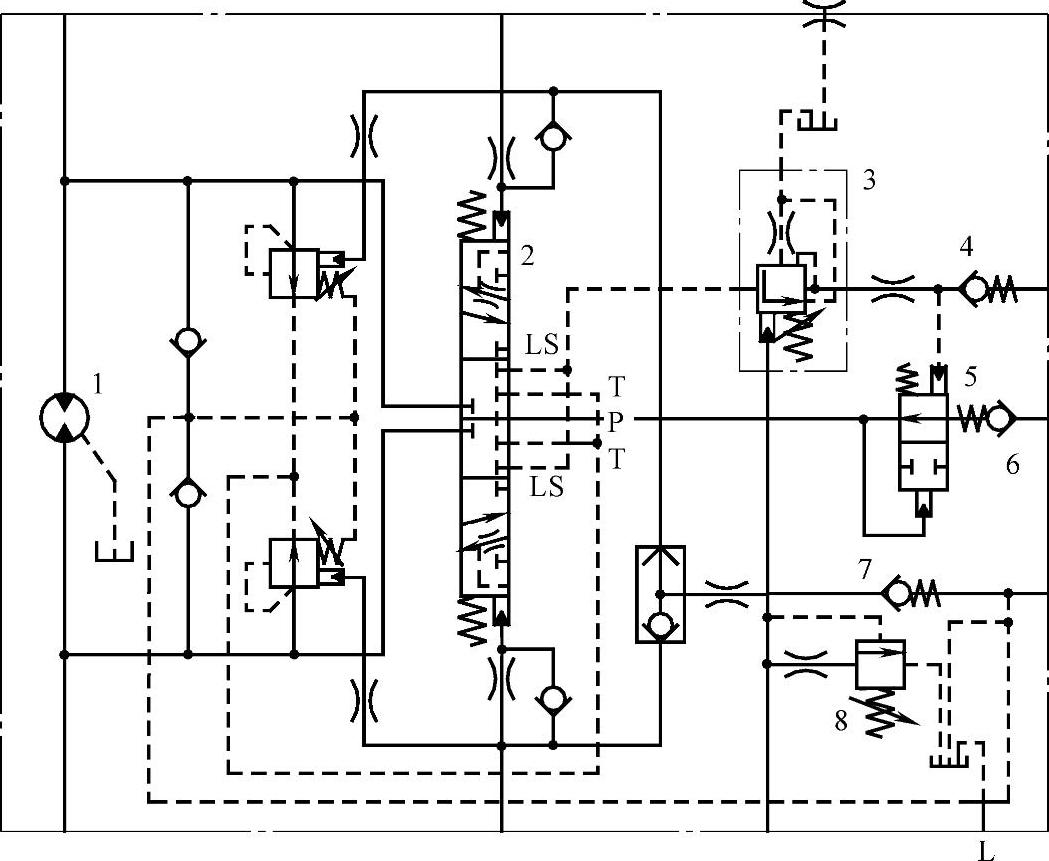
图5-45 回转液压系统
1—回转马达 2—换向阀 3—回转限压阀 4、6、7—单向阀 5—LS压力补偿阀 8—先导限压阀
如果作业装置的负载压力高于回转回路,单向阀4阻隔了作业回路负载压力对回转的影响,众所周知,液压油将优先流入压力最低的回转马达;反之,如果回转系统的负载压力为最高,则该压力通过单向阀4反馈到LS压力补偿阀5和液压泵的LS控制阀上,在正常情况下,回转回路则可按驾驶员的意愿得到足够的流量;此外,如果多个执行元件进行复合动作且系统发生饱和时,作业装置的速度将下降,但由于LS回路的Δp设定值较低,故仍可保持原设定值,回转的速度不变,从而也可保证回转优先。
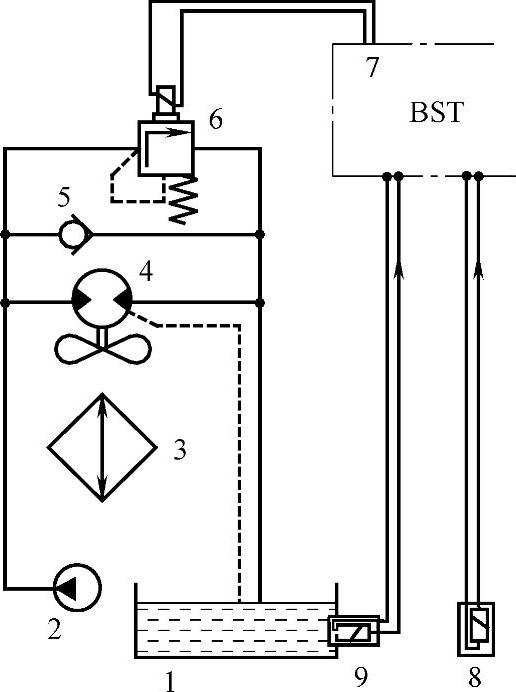
图5-46 静液压冷却系统简图
1—油箱 2—冷却泵 3—散热器 4—冷却马达 5—补油单向阀 6—比例电磁阀 7—微处理器BST 8—发动机温度传感器 9—液压油温度传感器
3.行走系统
R914B挖掘机左右各有一个FMV75型液压马达分别驱动左右行走终传动,同时通过电磁阀控制行走马达的排量,可实现行走快、慢两挡速度。此外,考虑挖掘机在行走过程中,若有一个其他工作装置同时动作,行走液压系统的负荷压力/LS压力将瞬间增大,行走速度则会出现突然降低的现象,为此设计了一个二位二通液动阀,使其在此种情况下相应增加工作装置系统的负荷压力/LS压力,确保挖掘机行走平稳,无发卡现象。
4.静液压独立冷却系统
与传统的机械式带传动冷却系统相比,静液压独立冷却系统有许多优点。如噪声低,环保效果较好;可降低油耗,达到节能的目的;冷却效率高;可靠性高和免维护等。R914B挖掘机的静液压冷却系统简图如图5-46所示。
其中,散热器由液压油散热器、空调系统冷凝器、发动机冷却液散热器及发动机中冷器组成。冷却泵和冷却马达均为定量泵和定量马达,风扇的转速是由BST输出电流信号通过比例电磁阀调节的。冷车时,液压油和冷却液温度较低,BST输出的电流较大,比例电磁阀的开度也较大,只有少量的液压油去冷却马达,此时冷却风扇的转速较低,约为750r/min;热车或夏季施工时,液压油和冷却液温度较高,BST则输出较小的电流,比例电磁阀的开度较小,绝大部分液压油流经冷却马达,此时冷却风扇的转速较高;若电气系统出现故障,导致BST输出电流为零,此时,电磁比例阀开度最大,风扇转速最高,约为1700r/min,这样系统还可以在安全模式下继续运行,起到自保护作用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。