



基于情感计算、认知理论,具有多通道、多模态人机交互与合作能力的物理型服务机器人系统,其信息流图如图11-18所示。
将服务机器人系统划分为七个层次:物理层、驱动层、信息处理层、行为规划层、传输层、应用层和系统监控层。
物理层:这一层作为交互逻辑的最底层,直接与环境、交互者和网络中的其他在线设备发生联系。它包括物理型服务机器人的各种硬件传感器、网络接口和有信息采集及处理功能的软件agent。对于物理型服务机器人,此层还包括舵机、步进电机等执行机构。
驱动层:驱动层位于软件系统和物理硬件层之间,完成服务机器人软件对硬件设备的驱动。通过对传感器采集信号的变换,转换成软件能够处理的信息。实现软件到硬件命令协议的转换,完成上位机软件平台对物理层硬件设备的控制。
信息处理层:传感器信息经过驱动层的转换后,在此层得到后期处理。通过细粒度模式识别,感知用户和环境的详细信息。粗粒度模式识别可以实现用户目的、意图等综合信息的判别。情感信息识别则可以从多种传感信息中获取用户的情感。此后,对交互信息和环境信息进行融合,去除其中包含的噪声和冗余信息,得到推理系统可以处理的标准信息格式。最后,利用机器学习、决策树或其他算法,实现推理系统对多种信息的综合推理。
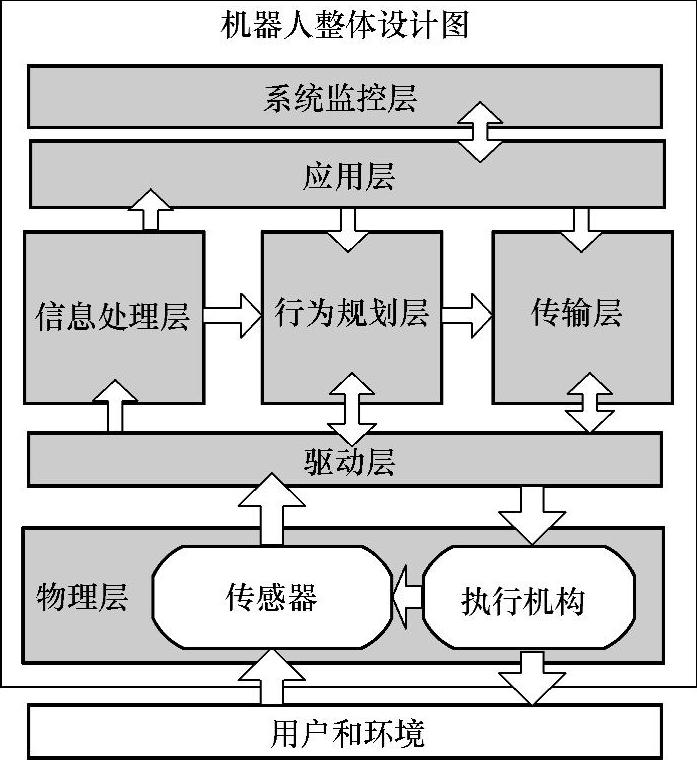
图11-18 服务机器人系统信息流图
在细粒度模式识别中,各识别模块功能可以分散在硬件上实现。从人类自身处理信息的流程来分析,会发现在完成多通道传感信息识别时,实现的功能基本上不需要人类太多的逻辑思维,由于人类频繁地使用,这些能力已经接近于人类的本能,比如当听一个人说话时,将听到的声音信号转化为能理解的语音信号的过程,可以说基本没有运用大脑的逻辑分析功能。由于拟开发的服务机器人最重要的特点是交互的实时性,所以需要将信息的处理过程尽可能分散,以减轻智能决策层处理信息的压力,提高处理速度。(https://www.xing528.com)
推理系统模拟人类大脑的逻辑推理和智能决策能力,同时受到情感产生系统和需求模型的影响。一个决策的生成,不但与我们获得的信息及掌握的知识有关,还与我们当时的心理状态以及要达到的交互目标有关系。基于确定性或不确定性推理理论以及智能决策算法,实现从标准的交互输入信息到行为输出信息之间的映射。
行为规划层:除了根据外界输入信息做出相应的反射行为外,还要根据应用层中用户的设计行为,综合知识库、行为库规划下一步服务机器人的行为。
反射行为的产生需要一个本能反射规则库支持。规则库包含一些基本的“感应-行动”规则,这些规则应该是“一对一”的形式,不允许有复合推理的形式出现。人体神经系统的调节方式是反射,天生具有的反射叫简单反射,又称为非条件反射,例如,缩手反射、眨眼反射等都属于简单反射,这是一种比较低级的动作调节方式。此过程不需要经过大脑皮层,只要有脊髓或脑干的神经中枢参与就可以完成,因此这种动作中没有逻辑成分。人类还有一种动作叫做无意识动作,比如,当一个人无聊时会做一些抖脚,搓手,玩头发等小动作,这些动作是没有经过大脑逻辑思维就可完成的,我们将服务机器人的无意识动作也在此考虑。服务机器人接收各种传感智能体经过初步处理的较原始的交互信息,此信息流可能会有冗余或冲突性质的信息体存在。简单反射的主要目标是机器人具有时效地完成简单反射动作,因此,在制定简单反射规则时,可以利用优先级规则来对各种交互信息体进行融合,以便决定当前要执行的交互动作。
传输层:此层包括多种模型,如,关注模型、情感产生系统、需求模型以及学习模型等。在获取用户注意力信息的基础上,关注模型能够计算出用户关注焦点,进而可以使机器人本身与用户保持对同一事物的关注。基于情感模型,服务机器人的情感产生系统可以产生自身的情感。同时,以马斯洛的需求层次理论为基础,建立需求模型,以反映服务机器人自身的需求。结合情感模型与关注模型的输出,进而影响到机器人的输出行为。学习模型则不断地获取机器人自身的输出行为,以及用户信息、环境信息的输入,学习其中的映射关系,来不断调整知识库和行为库,使服务机器人表现出动态的学习能力。
应用层:开放给研究者。他们可以利用开放的接口在这个层面上进行多方面的研究。在这一层,我们现在主要进行机器人的情感模型和服务交互与合作的研究,建立机器人的服务模式,并进行仿真与调试。
系统监控层:目前,服务机器人还不能完全自主,因此,用户对系统整体的运行情况进行监控是必要的。该层不参与具体的任务和行为规划。除了为用户提供服务机器人运行状态的信息外,当系统发生不可预见的困难情况时,由系统监控层通知用户处理这种异常、冲突和死锁。用户能够改变任务的执行状态(挂起、终止或执行)或改变机器人的运行模式等。在某些情况下用户还可以通过监控层直接控制机器人来完成期望的任务。此外,机器人还可以利用运行环境和状态信息,以不得伤害人和保护自身的安全为目的,在一定程度上实现模块的自组织和自诊断功能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。