



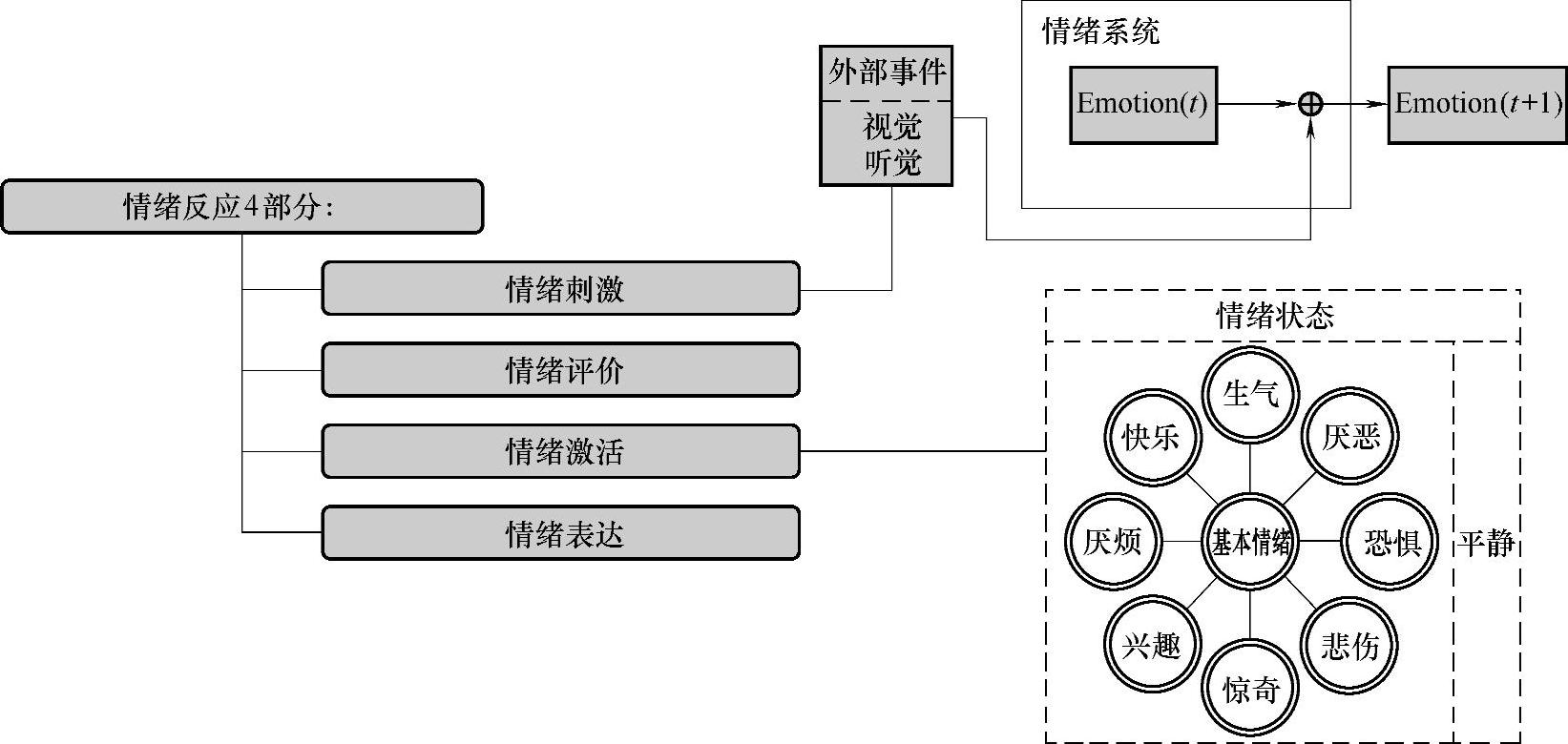
【摘要】:Kismet的情绪模型系统由情绪刺激、情绪评价、情绪激活和情绪表达四个部分组成。空间的每个区域代表特定的一种情感状态,某时刻的情感状态是综合考虑Kismet的感知系统、动机系统和行为系统的作用而得到的。图10-2 Kismet模型框架图图10-2 Kismet模型框架图
Kismet是麻省理工学院C.Breazeal设计的一个机器人,Kismet的组成主要有感知系统、行为系统、注意系统、动机系统和运动系统,Kismet的情感模型是作为环境、内部刺激和行为动作的媒介,通过这个情感模型,机器人对外界输入的刺激和内部需要进行综合判断,从而引起表现行为的各种变化。Kismet的情绪模型系统由情绪刺激、情绪评价、情绪激活和情绪表达四个部分组成。Kismet的情绪系统由外部事件激发,激发事件包括视觉刺激和听觉刺激,机器人的当前情感状态影响外界刺激的激发程度;情绪的评价部分是用来对一个给定的刺激使用三种情感特征(唤醒Arousal、效价Valence、姿态Stance)进行标记;情绪的激活状态包括快乐、生气、兴趣、悲伤等8种基本情绪以及平静;情绪的表达采用三维空间,三个维度对应的是唤醒、效价和姿态。机器人当前的情感状态是空间中的一个点,当它的情感状态改变时,这个点在这个三维空间内运动。空间的每个区域代表特定的一种情感状态,某时刻的情感状态是综合考虑Kismet的感知系统、动机系统和行为系统的作用而得到的。此模型可分为4个部分,如图10-2所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图10-2 Kismet模型框架图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。