



对于情感机器人的研制与开发,我们不仅要求其能够模拟人的视觉、听觉、语言表达等能力,还要求其在外表上也能够拟人化,同时能够模仿人类的面部表情和肢体动作,即情感机器人应具备类似人类的动作行为模式。设计智能情感机器人行为的基础在于其能够模仿人类的外形,本章所开发的交互平台是由北京科技大学王志良教授带领的机器人研究实验室自主制作的仿人机器人。根据各情感机器人具体功能和目的的不同,实验室所研发制作的情感机器人的外形如图7-18所示。

图7-18 实验室自主研发制作的智能机器人外形
身体语言,是指经由身体的各种动作,代替语言以达到表情达意的沟通目的。身体语言包括身体与四肢所表达的手势、姿势和面部表情。身体语言比语言本身更容易暴露出真实的自己。心理学家认为:情感表达=7%语言+38%声音+55%身体语言。可见人的身体语言在人与人的交流中发挥着重要作用。
为实现复杂的动作行为模式,更加细腻的表达情感,将情感机器人硬件结构分为脸部、颈部、肢体和底盘四个行为模块,分别使用四个处理器独立控制。这样可以方便地完成动作组合和动作序列的模块化。动作组合在上位机上完成。行为模式设计平台是由北京科技大学王志良教授带领的机器人研究实验室自主研发制作的机器人硬件结构。
机器人上身肢体结构如图7-19所示。
机器人脸部及头部结构如图7-20所示。
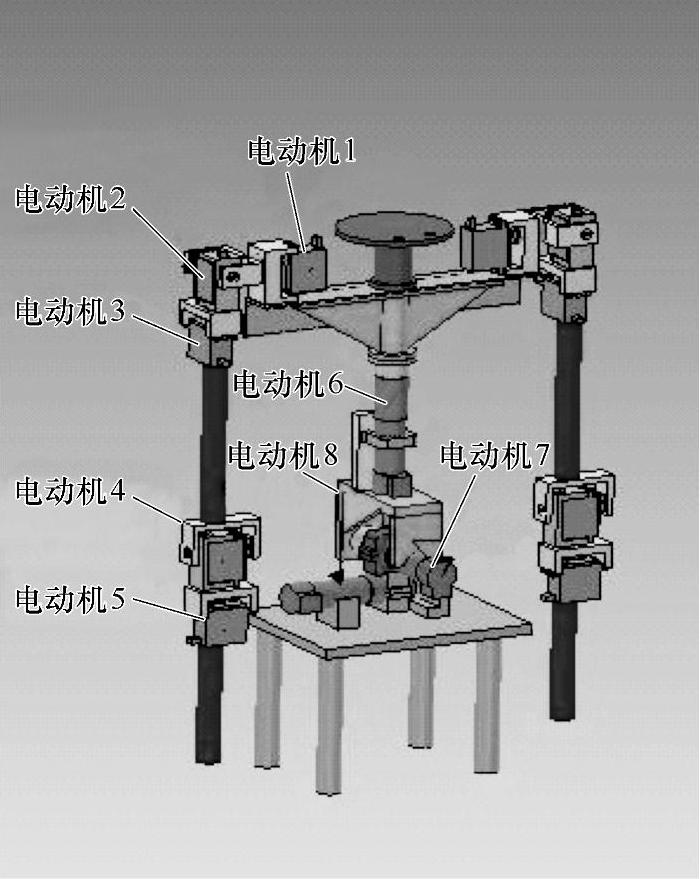
图7-19 机器人上身肢体结构
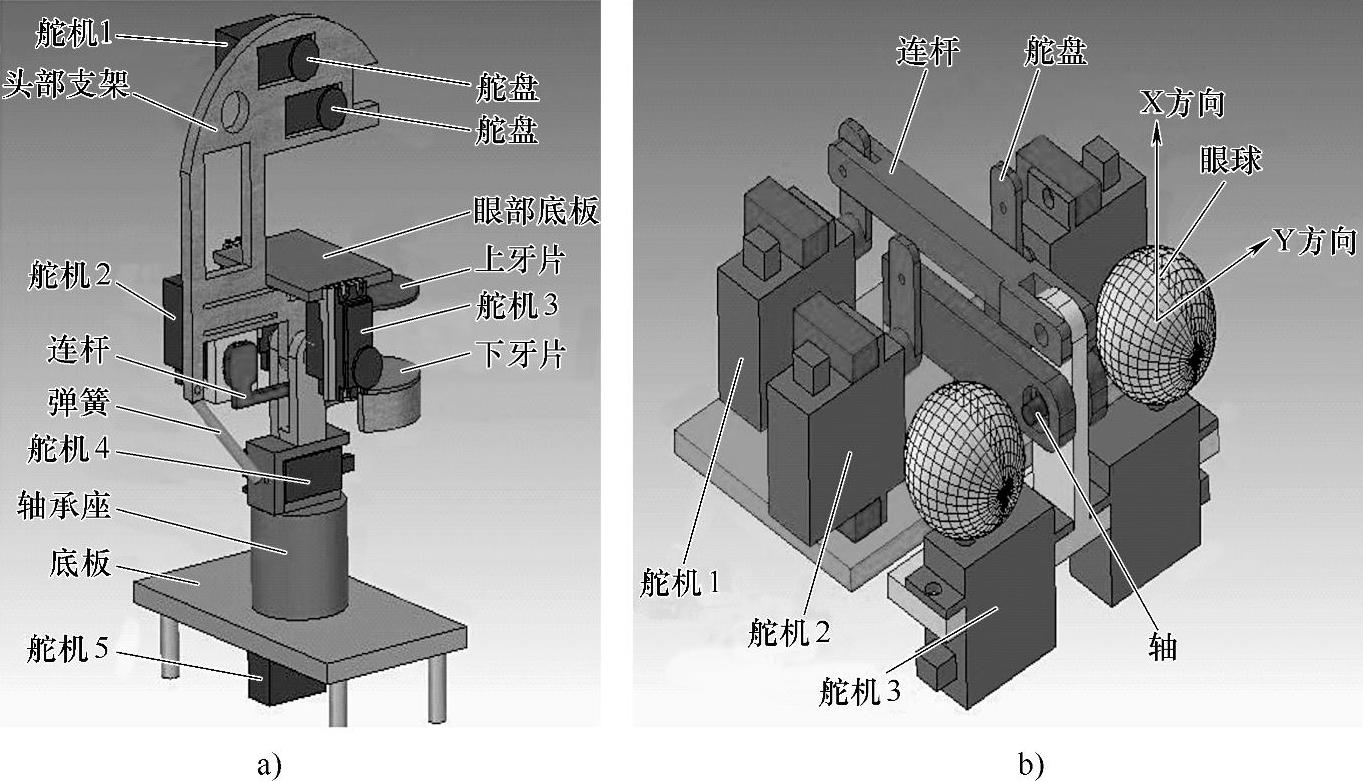
图7-20 脸部及头部结构
a)头部结构 b)眼部结构
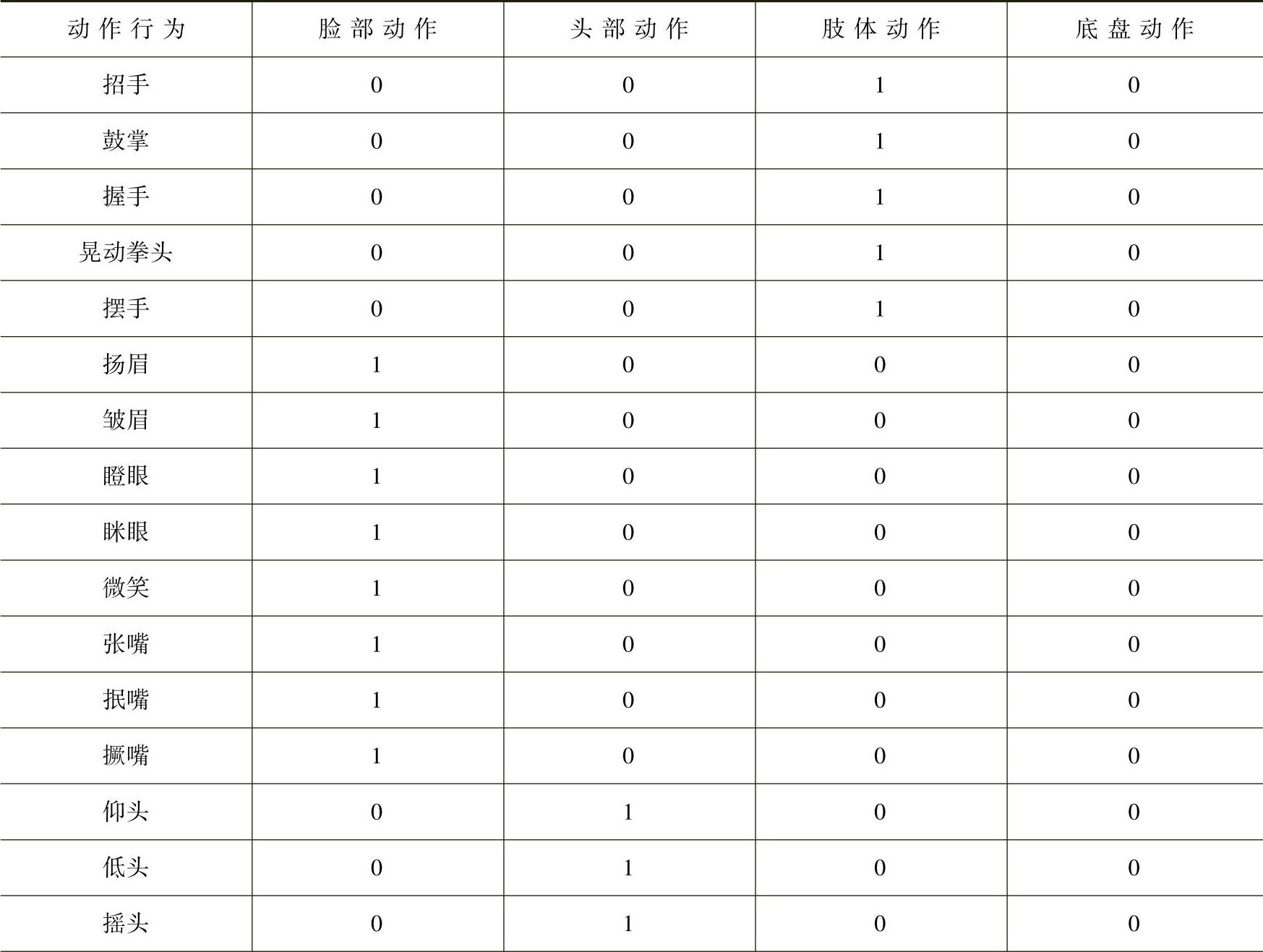
可交互的情感机器人将不同硬件模块的独立动作集成为一套完整的行为来模仿人类。将情感机器人的动作行为按照四个行为模块进行分类,见表7-2。
表7-2 情感机器人动作行为模块划分
 (https://www.xing528.com)
(https://www.xing528.com)
(续)

上表是四个行为模块的划分,以及行为动作对应的情感机器人舵机运行情况,1代表是,0代表否。
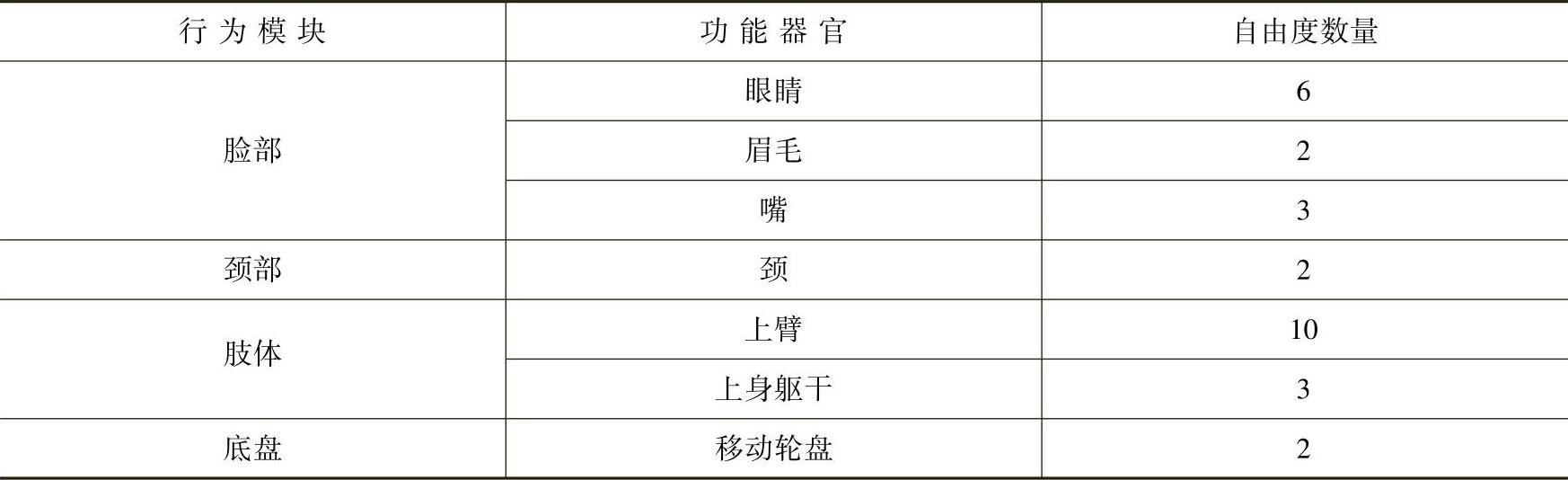
为使情感机器人具有更自然的行为动作,对不同模块以及不同部位的动作进行分析,四个行为模块中相应的功能器官设计应具备的自由度数量见表7-3。
表7-3 情感机器人行为模块自由度设计
机器人整体架构采用上下位机的分布式结构。上位机为嵌入式PC机,PC机包含各通用接口,操作系统选用Windows XP。软件平台、数据库,知识库及各硬件输入输出设备的驱动都安装于该操作系统中。下位机由单片机控制位于各器官模块的舵机来实现机器人的行为动作。
上下位机(上位机中的PC机与下位机中的单片机)通过无线发射盒进行通信。此系统的无线模块采用了市场上的ASK无线数传模块。这种模块全部采用SMT贴片组装,体积小,可靠性高,可以长时间连续发送和接收。而且它的频率源采用高稳定度晶体振荡加PLL电路构成,频率稳定度高,抗干扰能力强。另外,数据信号可以透明传输。将其安装于嵌入式PC上,选用串口连接无线发射盒。
经过近几年的使用和发展,在RS232标准的基础上不断进行改进,使得PC串行通信接口标准日益多样化。RS232C标准公布于1969年,是由美国EIA(电子工业联合会)与BELL等公司联合开发的通信协议。RS232C标准(协议)的全称是EIA-RS-232C标准,其中EIA(Electronic Industry Association)代表美国电子工业协会,RS(Recommended stand-ard)代表推荐标准,232是标识号,C代表RS232的最新一次修改(1969)。整个通信系统的结构设计为主从式串行总线形。RS232C标准最初是为远程通信连接数据终端设备(Data Terminal Equipment,DTE)与数据通信设备(Data Communication Equipment,DCE)而制定的,因而,它的电平与TTL电平之间需要转换。通信结构如图7-21所示。

图7-21 上下位机通信结构图
在标准串口通信方面,VC++提供了具有强大功能的串口编程控件MSComm。MSComm控件可设置串行通信的数据发送和接收,对串口状态及串口通信的信息格式和协议进行设置。在PC机和单片机的通信中,确定一个明确而合理的通信协议是关键。现今流行的通信协议应该对数据格式、通信方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定。
情感机器人下位机的四个行为模块分别对应于四个独立的单片机,为了区别不同的单片机,必须为每个分机分配一个唯一的地址,此地址唯一区别各单片机。并且规定一特殊符号标志为广播方式。数据格式采用数据包的形式,一次传输一组数据。数据包格式设计如下所示:

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。