



通过镜像摄像机与真实摄像机之间的约束关系,计算真实摄像机的位置。为了验证算法的效果,我们进行了大量的模拟实验。在试验中,设定了三个摄像机,选用的摄像机参数[fu,fv,s,u0,ν0,k1,k2,p1,p2]分别为[1000,1000,0,320,240,-0.2,0.2,0.01,0.01]、[1000,1000,0,320,240,-0.1,0.2,0.01,0]、[1000,1000,1,320,240,-0.2,0.2,0.01,0.01],图像分辨率为640×480。为了验证本方法对噪声的敏感性,对各点加入噪声[Δx,Δy],单位为像素,噪声水平为(0—1.0)。按照前面的摄像机标定方法和本章中的方法,在每个噪声等级下进行多次独立实验,并采用内参数估计值与真实值之差的绝对值与各参数之间的相对误差来度量估计结果。图5-10所示为内参数标定结果,图5-11所示为外参数标定结果。
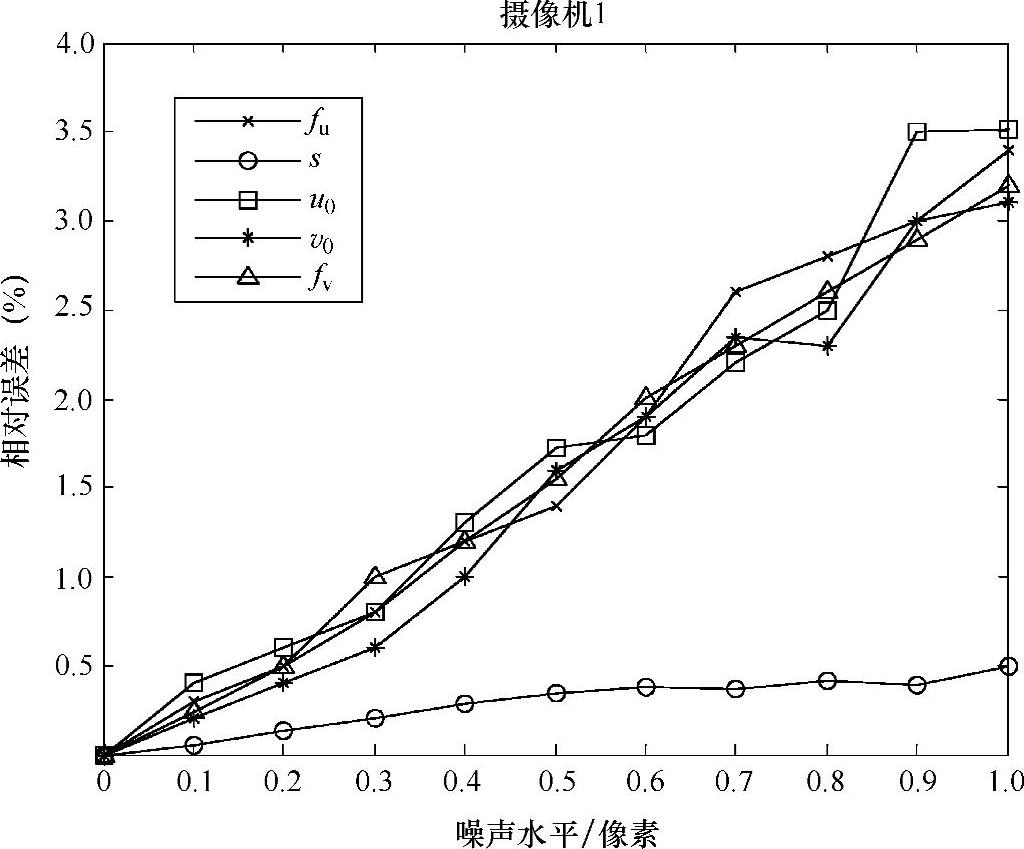
图5-10 摄像机内参数误差分析
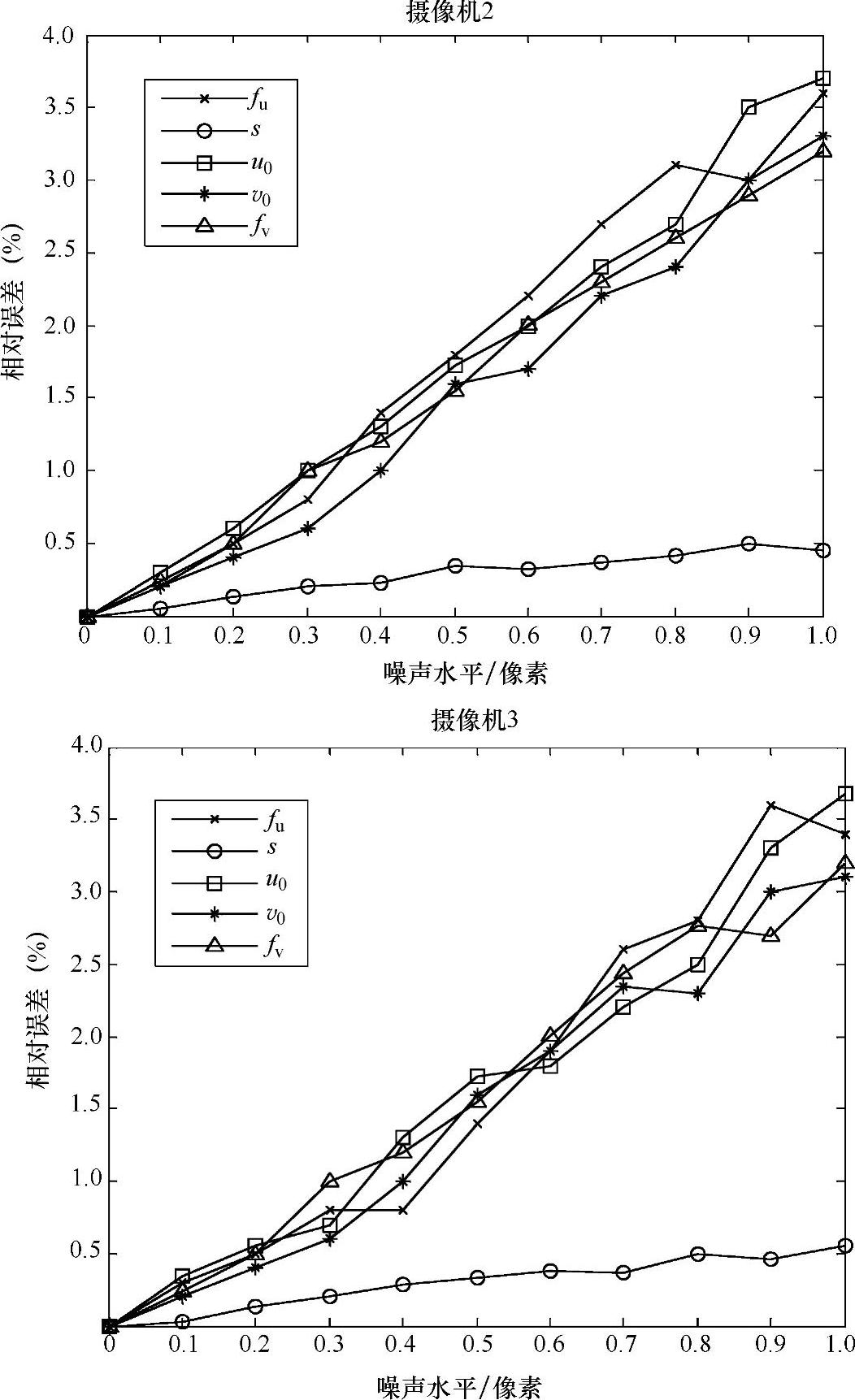
图5-10 摄像机内参数误差分析(续)(https://www.xing528.com)
针对情感机器人视觉系统中,眼睛,即摄像机,不能满足普通标定方法的要求,如标定物不能被所有的摄像机看到,我们提出了一种新的标定方法:标定物可以不被摄像机直接看到,通过转动一平面镜,使标定模板在摄像机视野内。通过计算得到摄像机镜像的内参数,即真实摄像机的参数。这种方法的特点在于平面镜的位置不作为标定的必要条件,也就是说平面镜的位置并不作为标定过程中的参数,取而代之的是镜像摄像机的位置,当摄像机通过镜子观测标定物时,摄像机的镜像位置与摄像机真实位置有唯一的确定关系。通过求摄像机镜像的位置及其之间的约束关系,可以得到摄像机真实的位置。
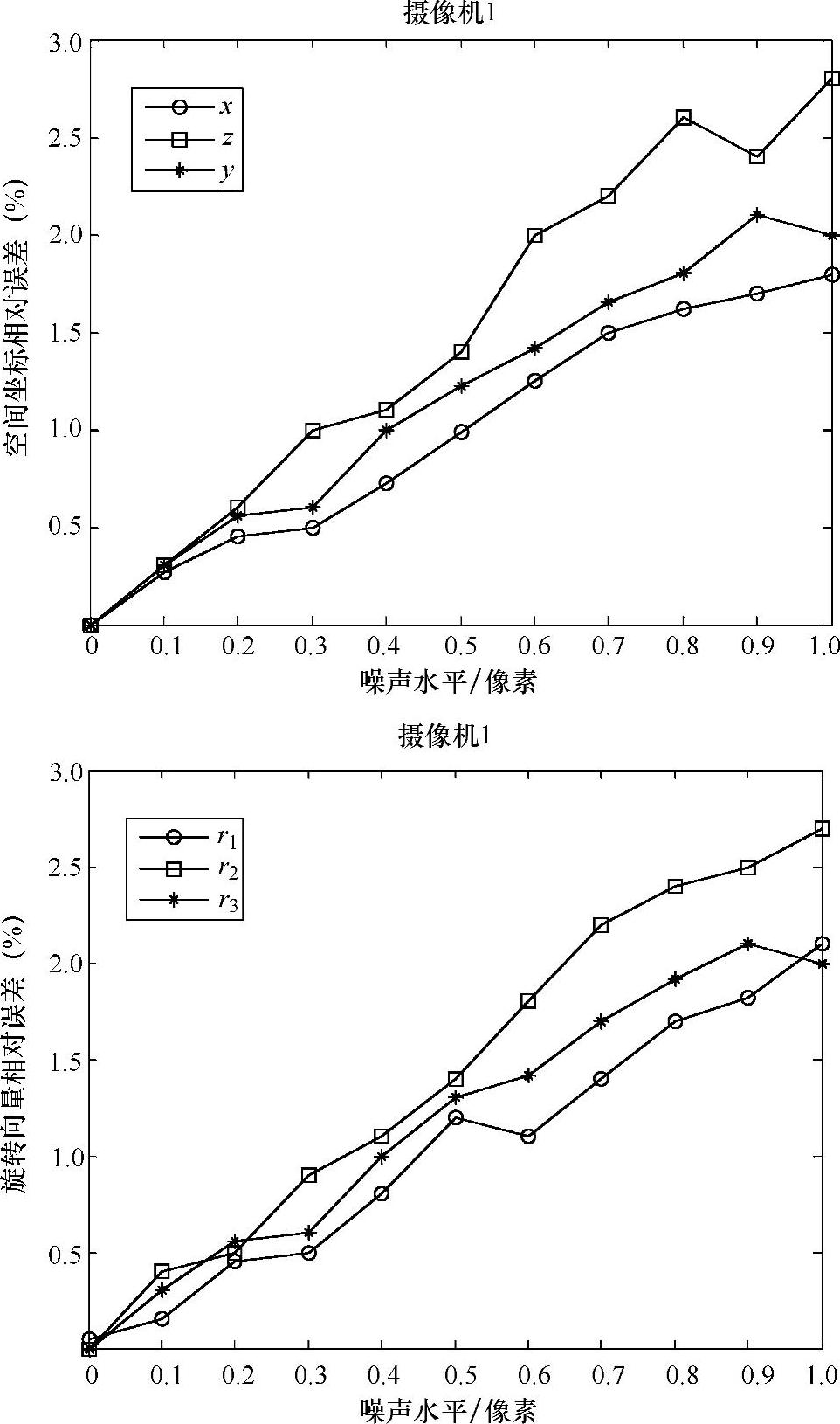
图5-11 摄像机1的外参数误差分析
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。