



使用平面镜拍摄平面模板图像,求镜子平面及屏幕和光源在镜子中像的三维坐标;通过求得的空间点估计镜子平面及像平面;根据离差求光源的像关于镜子平面的对称点。
以图5-1所示的系统为平台,依据本节中的方法进行了大量的实验。
1.双摄像机标定
标定所用图像共20幅,在摄像机前多角度转动拍摄。所拍摄的标定图像如图5-6所示,我们设定左摄像机的CCD中心为世界坐标系中心,图5-7所示为左右摄像机及所有标定图像在世界坐标系中的位置。
图5-6 标定图像
图5-6 标定图像(续)
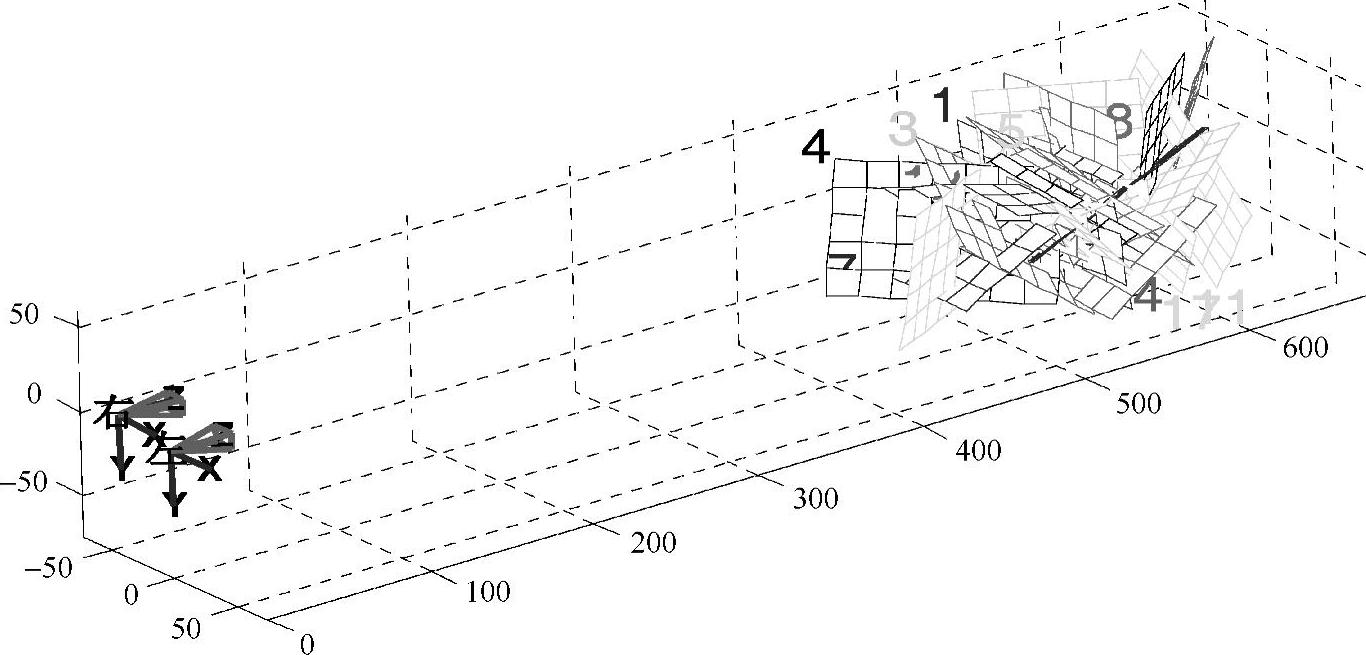
图5-7 左右摄像机坐标系下的外参数
2.系统标定
通过平面镜拍摄的图像如图5-8所示。从图中可以看出,光源及屏幕都在双摄像机可视范围内。
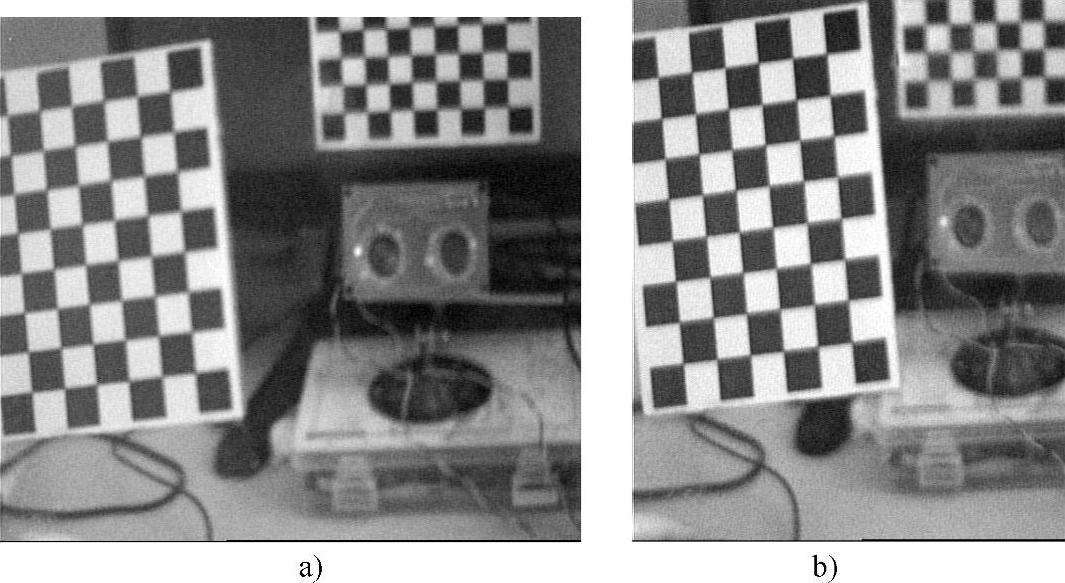
图5-8 使用平面镜拍摄的双摄像机图像
a)左摄像机拍摄图像 b)右摄像机拍摄图像(https://www.xing528.com)
通过角点检测得到图像中标定模板的图像坐标见表5-3。
表5-3 部分点的图像坐标
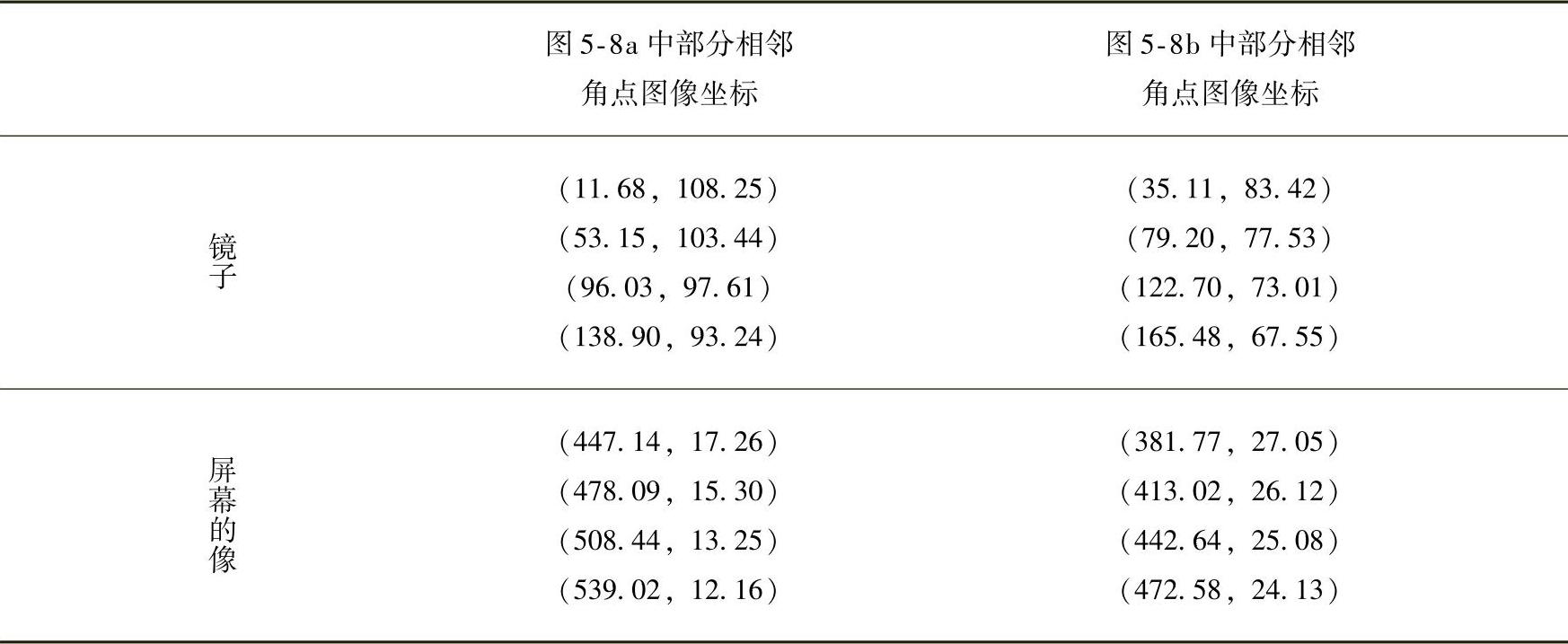
首先,通过摄像机标定分别得到左右摄像机的焦距fl=16.46,fr=16.31;屏幕标定模板相邻角点的标称值为16mm,镜子标定模板相邻角点的标称值为11mm。然后,计算出镜子和屏幕的像各点的三维坐标,再通过拟合得到镜子平面,求出像点关于镜子平面的对称点。
3.误差分析
我们使用了一种较为实际的误差评估方法,通过测量可得到标定模板上多个相邻角点的三维坐标,通过两两相邻的角点坐标可得到棋盘格的边长,即d= 其与实际边长的误差可衡量标定的精度。表5-4给出了镜子和屏幕部分相邻角点的空间距离及与实际边长的相对误差。图5-9显示了屏幕模板上各角点的空间坐标估计误差,由表5-4和图5-9可以看出,通过本文所采用的方法计算得到的空间坐标误差较小,能够满足视线追踪系统对空间三维坐标精度的要求。
其与实际边长的误差可衡量标定的精度。表5-4给出了镜子和屏幕部分相邻角点的空间距离及与实际边长的相对误差。图5-9显示了屏幕模板上各角点的空间坐标估计误差,由表5-4和图5-9可以看出,通过本文所采用的方法计算得到的空间坐标误差较小,能够满足视线追踪系统对空间三维坐标精度的要求。
从实验结果中可以得出:
1)拍摄更清晰的图片有利于误差的减少;
2)从表5-4中可以看出,使用标定模板中更多的角点进行计算,可以减少误差,使结果更精确。
表5-4 空间距离标定结果及误差
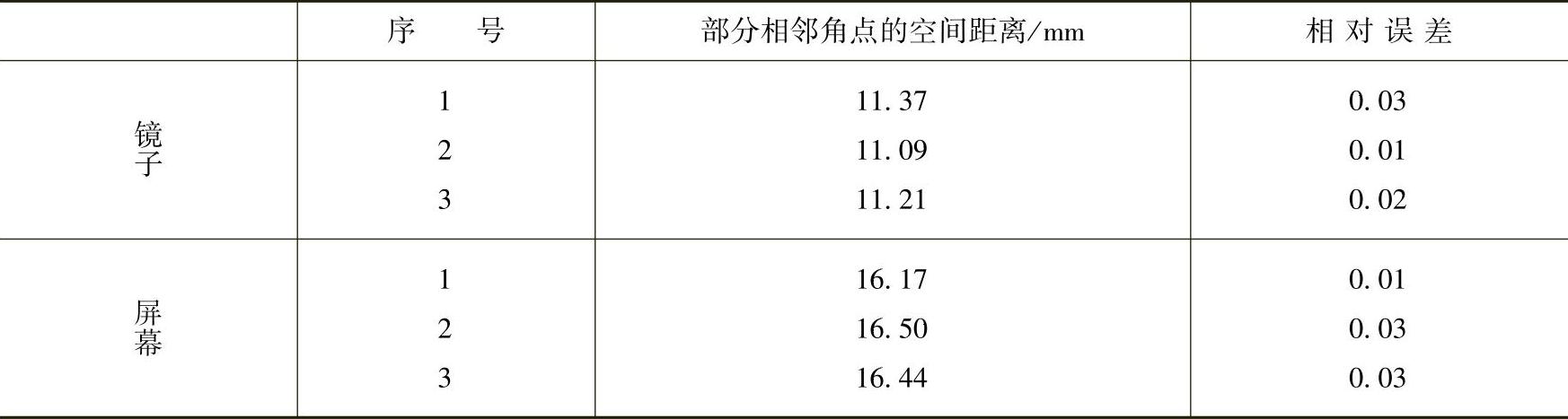
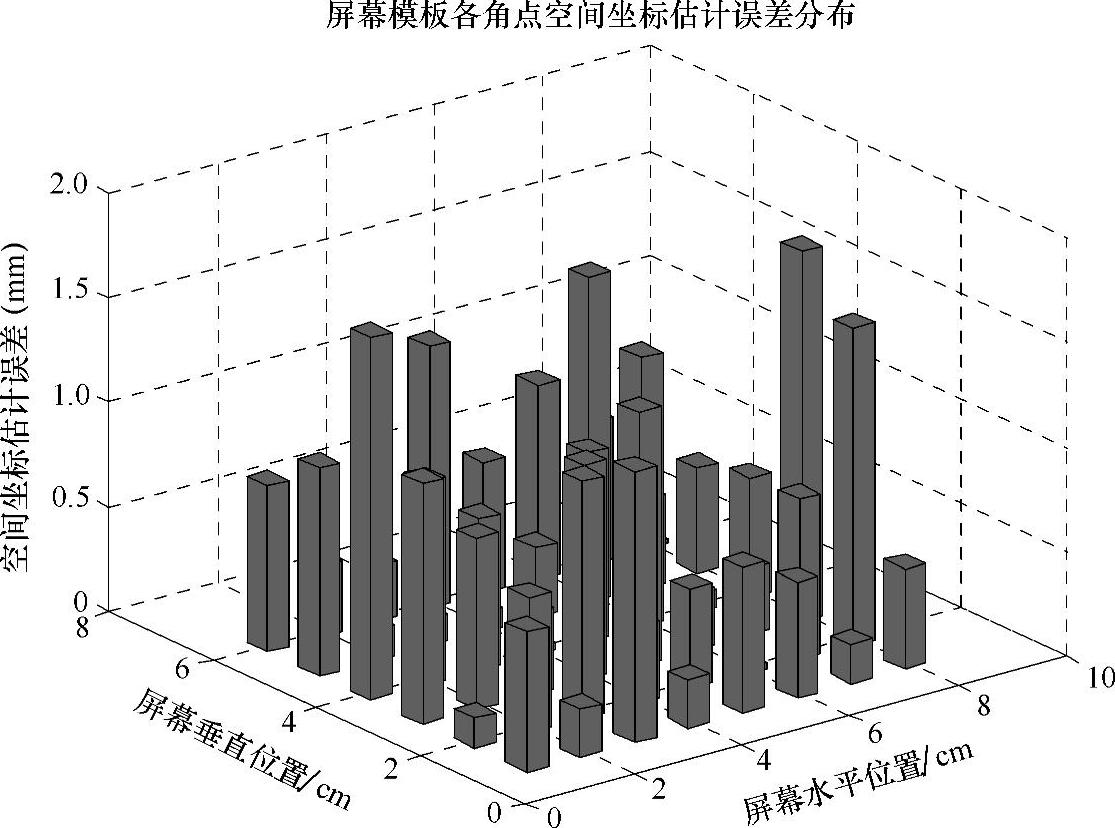
图5-9 屏幕模板各角点的空间坐标估计误差
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。