



【摘要】:按照本章中的摄像机标定方法,在每个噪声等级下进行多次独立实验。表5-1 图像中部分直线上点的图像坐标图5-4 重投影误差分析(续)2.真实实验从拍摄的20幅图像中选择一幅,其模板如图5-5a所示,棋盘格角点的图像坐标见表5-1。
1.模拟实验
在试验中,设定了摄像机参数[fu,fν,s,u0,ν0,k1,k2,p1,p2]分别为[1000,1000,0,320,240,0.1,-0.1,0.02,0.02]、图像分辨率为640×480。
为了验证本方法对噪声的敏感性,对各点加入噪声[Δx,Δy],单位为像素,噪声水平为(0—1.0)。按照本章中的摄像机标定方法,在每个噪声等级下进行多次独立实验。求得每个噪声级别下的摄像机畸变参数,根据求解得到的结果重新计算该点在图像坐标系下的坐标,并与该点的准确值进行比较,得到重投影误差,如图5-4所示,可以看出,根据本方法求解出的值与真实值差别很小。

图5-4 重投影误差分析
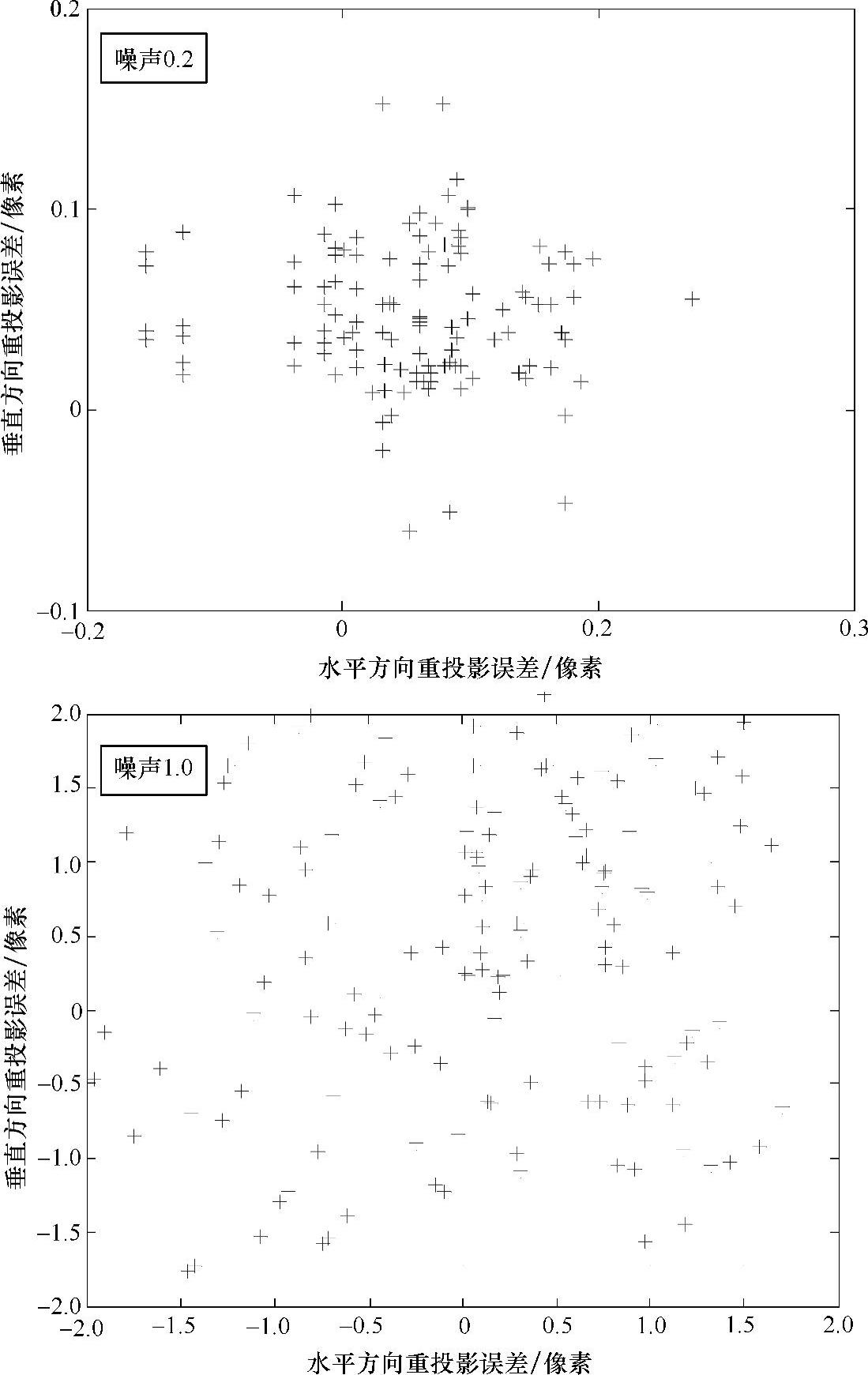
图5-4 重投影误差分析(续)
2.真实实验
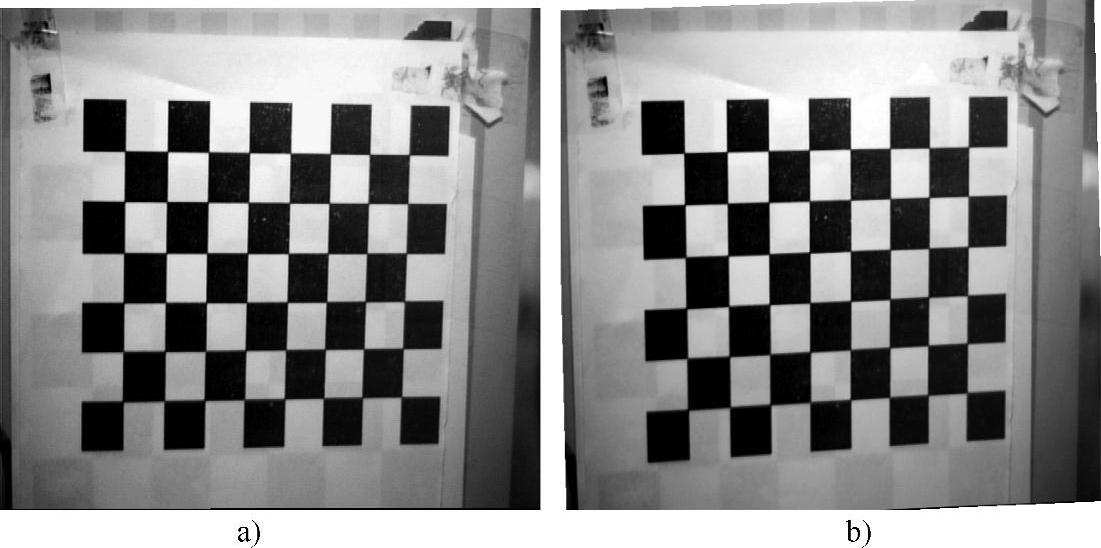
从拍摄的20幅图像中选择一幅,其模板如图5-5a所示,棋盘格角点的图像坐标见表5-1。
表5-1 图像中部分直线上点的图像坐标

 (https://www.xing528.com)
(https://www.xing528.com)
图5-5 拍摄的标定模板
a)原始图像 b)去畸变后图像
根据这些点,按照本章中的去畸变方法,得到畸变参数见表5-2。
表5-2 畸变参数

经过摄像机畸变校正得到的摄像机内参数矩阵为

针对图5-1中的模板参数得到以下矩阵

本书提出此种基于直线的摄像机镜头去畸变方法,针对标定参数较多的问题,先进行畸变校正,再标定摄像机的内外参数。在畸变校正的过程中,使用线性迭代方法,有效避免了非线性算法的初值选择困难、易于收敛于局部最小值等问题,且精度较高。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。