



1.理想的摄像机成像模型
理想的无透视畸变成像模型是小孔成像模型,它是最简单的摄像机成像模型。设空间一点P(X,Y,Z),其在图像上的透射投影为p(x,y),设f为摄像机焦距,根据透射投影的关系有

用矩阵表示为

根据世界坐标系与其在图像上的投影关系可得
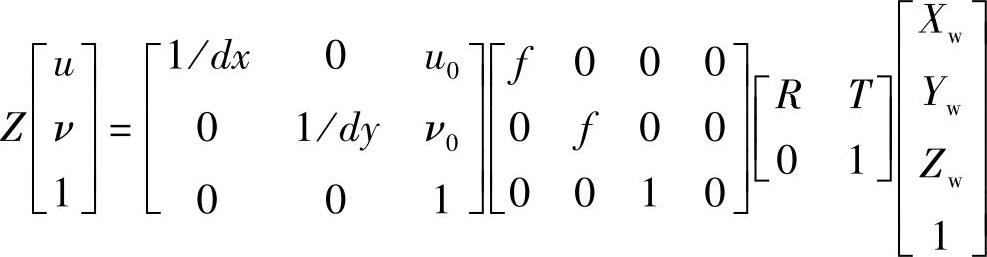
即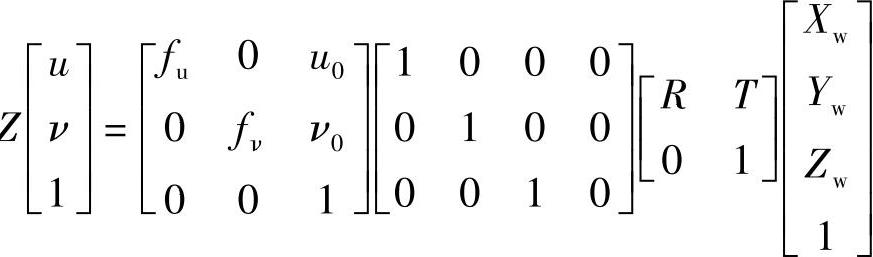
考虑到读取图像过程中可能会导致CCD敏感像元数和缓存中像素数不相等的情况,定义一个比例因子s作为补偿。上式最终可表示为

我们称矩阵 为摄像机标定内参数矩阵,其所有的参数只和摄像机本身有关。而R、T为摄像机外参数,由摄像机相对于世界坐标系的方位决定。
为摄像机标定内参数矩阵,其所有的参数只和摄像机本身有关。而R、T为摄像机外参数,由摄像机相对于世界坐标系的方位决定。
2.摄像机畸变模型
在实际应用中,由于摄像机镜头的畸变和装配误差等影响,实际得到的图像存在畸变。因此,在精度要求高的场合,需要考虑图像的畸变。图像畸变通常包括径向畸变、切向畸变和薄棱镜畸变,图5-2所示为理想无畸变图像点位置和有畸变图像点位置之间的关系。

图5-2 径向畸变与切向畸变图像点位置之间的关系
畸变模型的一般表达式为

其中,[x,y]T表示理想情况下的点坐标,[xd,yd]T表示存在畸变的点坐标。Δr为径向畸变,Δd为偏心畸变中的切向畸变,Δ t为薄棱镜畸变。一般来说,薄棱镜畸变影响较小,不予考虑。径向畸变和切向畸变已足够描述非线性畸变。
Δxr=xd(k1r2d+k2r2d)Δyr=yd(k1r2d+k2r2d)
Δxd=p1(r2d+2x2d)+2p2xdyd Δyd=p2(r2d+2y2d)+2p1xdyd
令q=[k1,k2,p1,p2]T,q为畸变参数向量,则上式可写为(https://www.xing528.com)
其中

图5-3 空间直线投影到像平面
3.摄像机模型畸变参数
根据摄像机畸变的原理,我们观察图像发现越远离图像中心图像畸变越严重,一条直线往往变形成类似圆弧的曲线,而由摄影几何可知,空间直线在像平面的投影仍是直线,如图5-3所示。
设空间直线投影到像平面的直线方程为xsinθ-ycosθ+ρ=0,其中,θ是直线与x轴夹角,ρ为直线到原点的距离。
设一组空间直线投影到像平面,令Ii(i=1,2,…n)为含有投影直线的图像,Ii上包含直线lij(j=1,2,…N),直线lij上的点为Pijk(xijk,yijk)(k=1,2,…N′),直线lij与x轴夹角为θij,到原点距离ρij。直线lij满足xijk sinθij-yijk cosθij+ρij=0,将
 代入,有
代入,有
(xijk d+Δxijk r+Δxijk d)sinθij-(yijk d+Δyijk r+Δyijk d)cosθij+ρij=0,令
 这样,求解摄像机畸变参数问题被转换为一个求解无约束最小值的问题
这样,求解摄像机畸变参数问题被转换为一个求解无约束最小值的问题

通常求解这类问题使用非线性求解算法,如共轭梯度法、L-M法等。非线性算法虽然具有收敛速度快、精度高等特点,但也存在着初始值的选择困难等问题,因此选用了线性的迭代算法求解。上式也可以写为 ,其中
,其中

我们按以下过程进行迭代求解:
1)直线lij的初始特征点坐标[xijk(0),yijk(0)],初始化迭代次数m=0;
2)使用最小二乘拟合直线lij的参数θij(n)、ρij(n);
3)求解方程组3-11,得q(n);
4)计算ξ(n)=q(n)-q(n-1),如果ξ(n)<ξ,转到6;
5)n=n+1,按式3-5计算(xijk(n),yijk(n)),转到2;
6)计算结束。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。