



【摘要】:图4-2 舵机的结构1—电流电动机 2—变速齿轮组 3—反馈电位计 4—控制电路板一般来讲,舵机主要由舵盘、变速齿轮组、位置反馈电位计、直流电动机、控制电路板等组成,如图4-2所示。舵机的瞬时运动速度由其内部的直流电动机和变速齿轮组的配合决定,在恒定的电压驱动下,其数值恒定不变。电源线与地线用于提供内部的直流电动机及控制线路所需的能源,电压通常介于4V和6V之间,该电源应尽可能与CPU系统的电源隔离。
舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各控制舵面来实现的。舵机因此得名:控制舵面的伺服电动机。不仅在航模飞机中,在其他的模型运动中都可以看到它的应用。船模上用来控制尾舵,车模中用来转向等。由此可见,凡是需要操作性动作时都可以用舵机来实现。
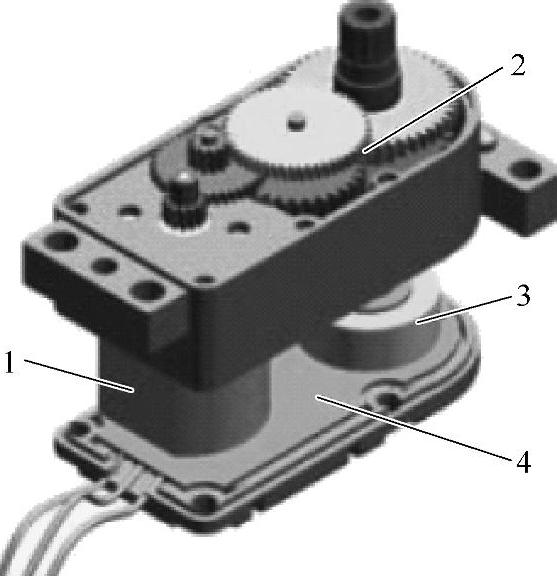
图4-2 舵机的结构
1—电流电动机 2—变速齿轮组 3—反馈电位计 4—控制电路板
一般来讲,舵机主要由舵盘、变速齿轮组、位置反馈电位计、直流电动机、控制电路板等组成,如图4-2所示。实际的舵机又有许多区别,例如电动机有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,速度有快速和慢速之分等,组合不同,价格也千差万别。(https://www.xing528.com)
舵机的瞬时运动速度由其内部的直流电动机和变速齿轮组的配合决定,在恒定的电压驱动下,其数值恒定不变。但其平均运动速度可通过分段停顿的控制方式来改变,例如,我们可把动作幅度为90°的转动细分为128个停顿点,通过控制每个停顿点来实现0°~90°的匀速变化。对于多数舵机来说,速度的单位是“°/s”。
标准的舵机有三条引线,分别为电源线VCC、地线GND及控制线CON,如图4-3所示。电源线与地线用于提供内部的直流电动机及控制线路所需的能源,电压通常介于4V和6V之间,该电源应尽可能与CPU系统的电源隔离(因为舵机会产生噪声)。小舵机在重负载时也会拉低放大器的电压,所以整个系统的电源供应比例必须合理。
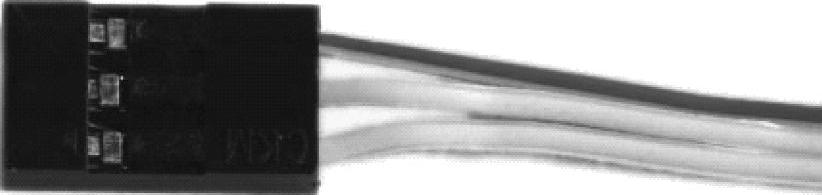
图4-3 舵机的引线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。